







两栖机器人以其在复杂水陆混合环境中的卓越适应性而脱颖而出,成为非结构化场景下信息监测、资源勘探和灾难救援等多元化任务的理想选择。凭借能够在水生和陆生环境中自如切换的优势,两栖机器人在如上任务执行过程中展现出对多变环境的惊人适应能力。
在两栖机器人的领域中,刚体两栖机器人与软体两栖机器人各自占据一席之地。刚体两栖机器人以其坚固的结构和稳定的性能,能够在一定程度上适应不同的环境。
而软体两栖机器人则凭借其能够主动或被动地根据周围环境调整自身形态更好适应各种复杂地形环境,以及具有固有柔顺性的独特优势,在任务执行中展现出高效率,在生态敏感区域应用中表现出高潜力。这些优势也进一步使得软体两栖机器人成为两栖机器人领域的研究热点。
但同时,软体两栖机器人在实现高机动性和多地形适应能力方面仍然面临巨大挑战。
前不久,来自北京大学工学院谢广明教授团队的研究人员受果蝇幼虫和海蛞蝓独特的运动模式启发,提出了一种基于塑料片增强的薄膜气动驱动器的软体两栖机器人。
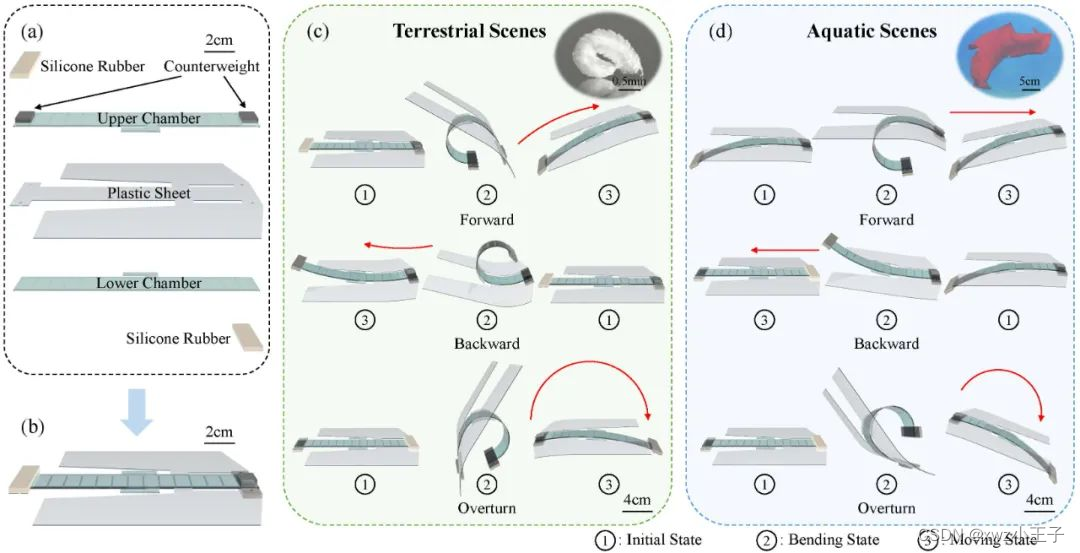
图1. 软体两栖机器人的设计及运动原理
该软体两栖机器人具有超强多地形适应能力,不仅可适应斜坡、障碍、台阶、泥地、沙地和砾石等多种地形,还具备多种运动模态,可在陆地和水生环境中自如执行前进、后退、转弯、自翻等丰富动作。同时,该机器人在高机动性方面也取得了显著成果,跳跃速度最高可达1.77BL/s,游泳速度最高可达0.69BL/s,相较于此前报道的软体两栖机器人,其速度更快。
近日,该研究成果的相关论文以“Multimodal Soft Amphibious Robots Using Simple Plastic-Sheet-Rein
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









