







具身人工智能 (EAI) 正在进步。我们建议用人类在日常生活中需要解决的物理挑战来测试EAI能力:家庭活动,如洗衣服,捡玩具,摆桌子或清洁地板。近期来自斯坦福、得克萨斯大学奥斯汀分校等大学的研究团队推出了一项以人为本的机器人技术综合模拟基准——BEHAVIOR-1K。
https://arxiv.org/abs/2403.09227
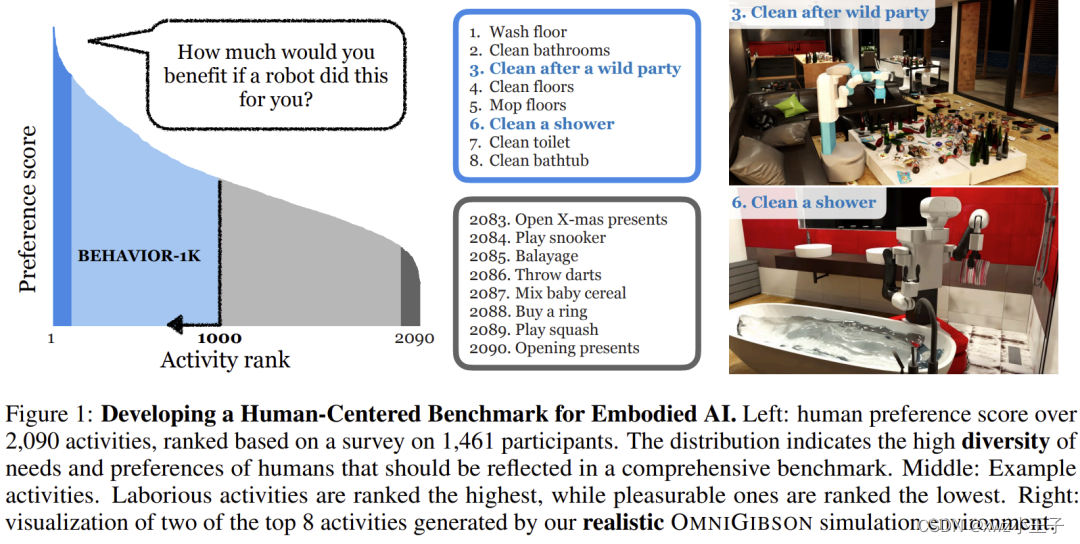
BEHAVIOR-1K 包括两个部分,由 “您希望机器人为您做什么?”这一问题的广泛调查结果指导和推动。第一部分是对 1000 种日常活动的定义,以 50 个场景(房屋、花园、餐厅、办公室等)为基础,其中有 9000 多个标注了丰富物理和语义属性的物体。其次是 OMNIGIBSON,这是一个模拟环境,通过对刚体、可变形体和液体进行逼真的物理模拟和渲染来支持这些活动。
实验表明,BEHAVIOR-1K 中的活动是长序列的,并且依赖于复杂的操作技能,这两点对于最先进的机器人学习解决方案来说仍然是一个挑战。为了校准 BEHAVIOR-1K 的模拟与现实之间的差距,研究团队进行了一项初步研究,将在模拟环境中使用移动机械手学习到的解决方案转移到现实世界中。
BEHAVIOR 的更广泛目标是推动通用、有效的 EAI 的发展,为人们的日常生活带来重大好处——以人为本的人工智能,满足人类的需求、目标和价值观。BEHAVIOR通过从人类时间使用调查中选择活动,并进行大规模的偏好调查来实现这一目标,这些调查询问人们:“你希望机器人为你做哪些日常活动?此外,这些活动是根据参与式设计的原则定义的:一个由众
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









