







 麻省理工学院的研究团队开发了一种结合了软性手掌和高精度触觉传感的机器人手,通过增加物体接触面积,提高抓取稳定性。他们创新的低成本照明系统和ROMEO手指设计有望推动软-刚性触觉机械手的发展,未来将扩展到更大物体抓取和复杂任务中。
麻省理工学院的研究团队开发了一种结合了软性手掌和高精度触觉传感的机器人手,通过增加物体接触面积,提高抓取稳定性。他们创新的低成本照明系统和ROMEO手指设计有望推动软-刚性触觉机械手的发展,未来将扩展到更大物体抓取和复杂任务中。
目前许多机器人手可以依靠极其灵巧的机器人手指和拇指关节包围在物体周围,从而实现物体的抓取与搬运,这种实现方式基本上与人抓取物体的方式无异。人手的抓取很大程度上是依赖于其手指不光滑且柔软的表面,但大部分研究者却忽视了手掌的作用,因此很少有人将研究方向放在手掌上。
在此现状下,来自麻省理工学院的Sandra Q. Liu和Edward H. Adelson开发了一种新型的软性手掌。这种新型软掌可以使被压入其中的物体能够接触到更多的表面积,并且该设计能够结合Gel Sight传感器的高分辨触觉传感系统,并搭配机器人模块化内骨骼光学(ROMEO)手指。
以此所得到的机器人手结构精巧,代表了首批具有驱动手指和被动柔顺手掌的软体机器人手之一,这种设计也助推了研究人员发现和探索未来更多可能的的软-刚性触觉机械手设计。
成果:
•研究团队开发了一种新型低成本、有效的基于相机的触觉传感器的照明系统,该系统易于集成到不同的软体中。还开发了一种机器人模块化内骨骼光学(ROMEO)手指设计,并采用了新的光照系统。
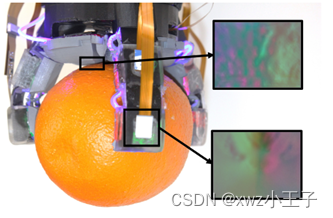
•高分辨率触觉传感的被动弯曲方式和以及新颖的手掌设计,能够增加被抓物体的表面积接触,能够增加被抓物体的表面积接触,并将其集成到一个高分辨率的触觉传感手(下图)。这种机器人手通过一种新型的双柔顺手掌与三个新型ROMEO手指相结合,并且手掌和手指都具有GelSight启发的触觉感知。
方法:
首先在硬件方面,研究团队开发了一种新型基于相机的触觉传感照明系统和一种新型的触觉软体手掌,使得ROMEO手指可以在多种不同的配置中使用,如下图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









