







人手具备23个自由度,重量仅为人体重量约1/150,但运动功能占全身运动功能的54%。例如,人手可以实现33种不同的抓握动作,可以完成复杂的手语手势,可以完成剪刀操作、手机使用等精细操作任务。手是体现人类以及人形机器人工作能力的关键部件。
然而,目前人形机器人的灵巧手以及全球超过一千万名上肢截肢患者的假肢手应用面临挑战。传统假肢灵巧手通常使用电机驱动,功率密度低,难以在自由度与重量之间找到理想平衡:佩戴超过人手重量的灵巧手会让患者感到严重不适,而自由度较低(通常少于10个)灵巧手仅能实现有限的抓握动作,远不及人手的灵活性。这些限制导致接近一半的假肢灵巧手被患者放弃使用。因此,兼顾高自由度灵巧运动和舒适佩戴的设计方法是假肢灵巧手领域的重要科学问题之一。
针对这一难题,来自中国科学技术大学工程科学学院/人形机器人研究院的张世武教授以及合作者团队成功研发了一种具备19自由度的轻质仿生灵巧手,能够复现人手级别的功能,有望服务全球上千万上肢截肢患者的手部功能重建与日常生活辅助,并应用于人形机器人灵巧操作。相关成果1月22日以 " A lightweight prosthetic hand with 19-DOF dexterity and human-level functions" 为题在线发表于国际学术期刊《Nature Communications》。
图1. 灵巧手三维结构展示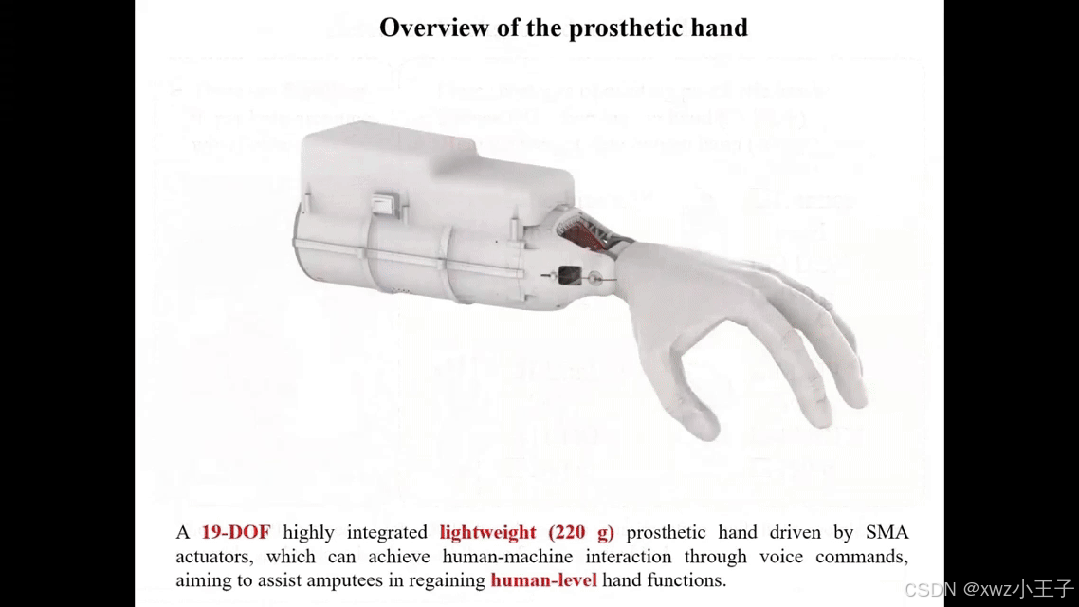
▍形状记忆合金助力高水平仿生设计
研究团队以高功重比形状记忆合金(SMA)为人工肌肉驱动,仿生设计了类肌腱传动系统放大SMA的驱动力同时减小传动阻力,基于类肌腱分离传动特征在手指及手腕内嵌入23组传感单元实现关节
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









