







个人名片
🎓作者简介:java领域优质创作者
🌐个人主页:码农阿豪
📞工作室:新空间代码工作室(提供各种软件服务)
💌个人邮箱:[2435024119@qq.com]
📱个人微信:15279484656
🌐个人导航网站:www.forff.top
💡座右铭:总有人要赢。为什么不能是我呢?

- 专栏导航:
码农阿豪系列专栏导航
面试专栏:收集了java相关高频面试题,面试实战总结🍻🎉🖥️
Spring5系列专栏:整理了Spring5重要知识点与实战演练,有案例可直接使用🚀🔧💻
Redis专栏:Redis从零到一学习分享,经验总结,案例实战💐📝💡
全栈系列专栏:海纳百川有容乃大,可能你想要的东西里面都有🤸🌱🚀
目录
KUKA机器人有四种运行方式:手动慢速运行(T1)、手动快速运行(T2)、自动运行(AUT)和外部自动运行(AUT EXT)。而外部自动运行模式(AUT EXT)在实际生产中经常用到,KUKA机器人的外部自动功能允许上级控制系统(如PLC等)通过特定的接口控制机器人的进程,实现对机器人程序的远程启动、停止和状态监控等操作。在实际应用中,KUKA机器人的外部自动运行模式通过配置CELL.SRC程序和输入/输出端信号来实现。这种模式主要应用于需要将机器人集成到大规模生产线中的场景,通过PLC这样的上级控制器来协调机器人与其他设备的同步工作,确保整个生产线的高效运转。
上级控制器与机器人之间需要通过相关信号来进行交互,以下对相关信号进行介绍。
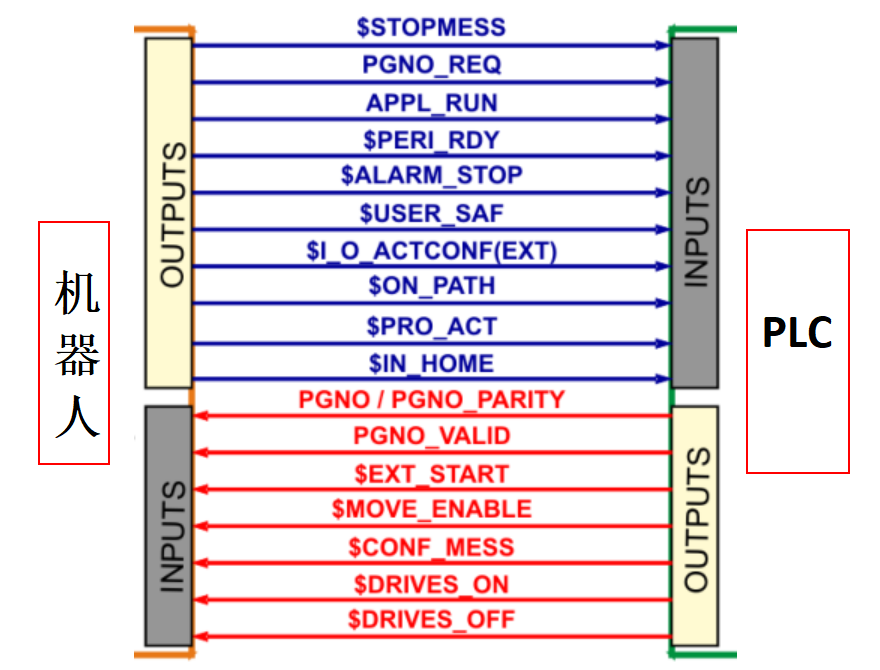
一、输入端(从机器人控制器角度)
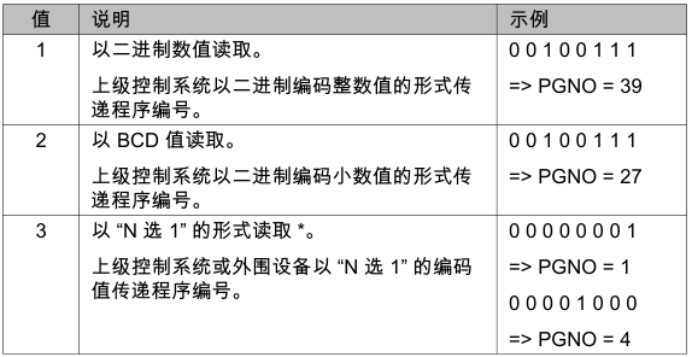
① PGNO_TYPE - 程序号类型
此变量确定了以何种格式来读取上级控制系统传送的程序编号。
② PGNO_LENGTH - 程序号长度
此变量确定了上级控制系统传送的程序编号的位宽。值域:1 … 16。
若 PGNO_TYPE 的值为 2,则只允许位宽为 4、8、12 和 16。
③ PGNO_PARITY - 程序号的奇偶位
上级控制系统传递奇偶位的输入端。

④ PGNO_VALID - 程序号有效
上级控制系统传送读取程序号指令的输入端。
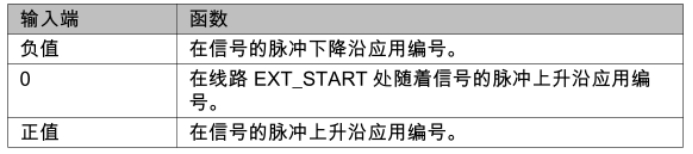
⑤ $EXT_START - 外部启动
设定了该输入端后,输入/输出接口激活时将启动或继续一个程序(一般为 CELL.SRC)。
⑥ $MOVE_ENABLE - 允许运行
该输入端用于由上级控制器对机器人驱动器进行检查。

⑦ $CONF_MESS - 确认信息提示
通过给该输入端赋值,当故障原因排除后,上级控制器将自己确认故障信息。
⑧ $DRIVES_ON - 驱动装置接通
如果在此输入端上施加了持续至少 20 毫秒的高脉冲,则上级控制系统会接通机器人驱动装置。
⑨ $DRIVES_OFF - 驱动装置关闭
如果在此输入端上施加了持续至少 20 毫秒的低脉冲,则上级控制系统会关断机器人驱动装置。

二、输出端(从机器人控制器角度)
① $ALARM_STOP - 紧急停止
该输出端将在出现以下紧急停止情形时复位:
1)按下了示教器上的紧急停止按键。(内部紧急关断)
2)外部紧急停止。
② $USER_SAF - 操作人员防护装置 / 防护门
该输出端在打开护栏询问开关 (运行方式 AUT)或放开确认开关 (运行方式 T1 或 T2)时复位。
③ $PERI_RDY - 驱动装置处于待机状态
通过设定此输出端机器人控制系统通知上级控制系统机器人驱动装置已接通。
④ $STOPMESS - 停止信息
该输出端由机器人控制系统来设定,以向上级控制器显示出现了一条要求停住机器人的信息提示。(例如:紧急停止按键、运行开通或操作人员防护装置)
⑤ $I_O_ACTCONF - 外部自动运行激活
选择了外部自动运行这一运行方式并且输入端 $I_O_ACT 为 TRUE(一般始终设为 $IN[1025])后,输出端为 TRUE。
⑥ $PRO_ACT - 程序激活 / 正在运行
当一个机器人层面上的过程激活时,始终给该输出端赋值。在处理一个程序或中断时,过程为激 活状态。程序结束时的程序处理只有在所有脉冲输出端和触发器均处理完毕之后才视为未激活。
⑦ PGNO_REQ - 程序号问询
在该输出端信号变化时,要求上级控制器传送一个程序号。
⑧ APPL_RUN - 应用程序在运行中
机器人控制系统通过设置此输出端来通知上级控制系统机器人正在处理有关程序。
⑨ $IN_HOME - 机器人位于起始位置 (HOME)
该输出端通知上级控制器机器人正位于其起始位置 (HOME)。
⑩ $ON_PATH - 机器人位于轨迹上
只要机器人位于编程设定的轨迹上,此输出端即被赋值。在进行了 BCO运行后输出端 ON_PATH 即被赋值。输出端保持激活,直到机器人离开了轨迹、程序复位或选择了语句。

三、实际应用中的注意事项
在实际项目中对KUKA机器人进行调试时,KUKA机器人的外部自动功能通过与上级控制系统(如PLC等)的信号交互,实现了外部系统对机器人程序的远程控制和状态监控。这种模式不仅提高了生产的灵活性和效率,还便于集成到复杂的自动化系统中。在进行外部自动操作时,注意确保安全,同时也需要注意以下几点:
信号配置
确保正确配置CELL.SRC程序和输入/输出端信号,以实现上级控制系统与机器人的有效通信。输入端包括程序号类型(PGNO_TYPE)、程序号长度(PGNO_LENGTH)、外部启动(
E
X
T
S
T
A
R
T
)等;输出端包括紧急停止(
EXT_START)等;输出端包括紧急停止(
EXTSTART)等;输出端包括紧急停止(ALARM_STOP)、驱动装置待机状态(
P
E
R
I
R
D
Y
)、程序激活(
PERI_RDY)、程序激活(
PERIRDY)、程序激活(PRO_ACT)等。
安全性
在进行外部自动操作时,必须确保安全性,特别是在涉及紧急停止和操作人员防护装置的情况下。正确配置和使用这些信号可以避免潜在的安全风险。除了基本的安全措施外,还应定期检查信号的配置和连接,以确保它们的正常工作。对于涉及多台设备的复杂生产线,尤其需要细致的安全评估和规划,确保各个环节的紧密配合和安全运行。
集成测试
在实际应用中,通过PLC等上级控制系统与KUKA机器人进行集成测试,确保信号交互的正确性和可靠性。这包括测试程序的远程启动、停止、状态监控等功能。进行测试时应尽可能模拟实际生产环境,确保所有潜在的问题都能在测试阶段被发现和解决。对于大型生产线,集成测试尤为重要,因为它能够提前发现和解决可能出现的兼容性和协同问题。
维护和优化
外部自动运行模式的高效运作离不开定期的维护和优化。定期检查和维护各个信号接口和连接,确保其在长时间运行后的可靠性和稳定性。除了硬件维护外,还应关注软件层面的优化,确保控制程序的高效运行和快速响应。对于需要频繁更换生产任务的生产线,灵活和高效的程序切换和调整是关键。
通过正确配置和使用KUKA机器人的外部自动运行模式,可以实现高效、灵活的生产控制,提高整体生产线的效率和可靠性。希望本文的介绍能帮助你更好地理解和应用KUKA机器人的外部自动运行模式,实现自动化生产的高效运转。在未来的应用中,可以根据实际需要进行进一步的调整和优化,以充分发挥KUKA机器人的优势,为企业创造更大的价值。



















 3146
3146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











