







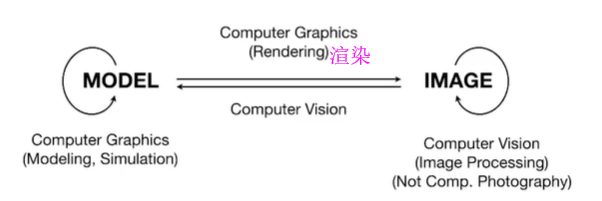
lecture 01:overview
- 计算机图形学≠计算机视觉,视觉需要猜测,图形学需要模拟
lecture 02:线代基础
点乘
- 得到的结果是一个数,表示a在b上的投影长度
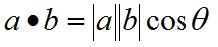

- 应用:判断两个向量的方向
向量的点积与它们夹角的余弦成正比,因此在聚光灯的效果计算中,可以根据点积来得到光照效果,如果点积越大,说明夹角越小,则物体离光照的轴线越近,光照越强。
叉乘 cross product
-
结果是一个向量,垂直于两个向量

-
右手定则判断结果,如a×b,则右手转的方向为a到b,大拇指向上
-
作用
判断左右,判断内外
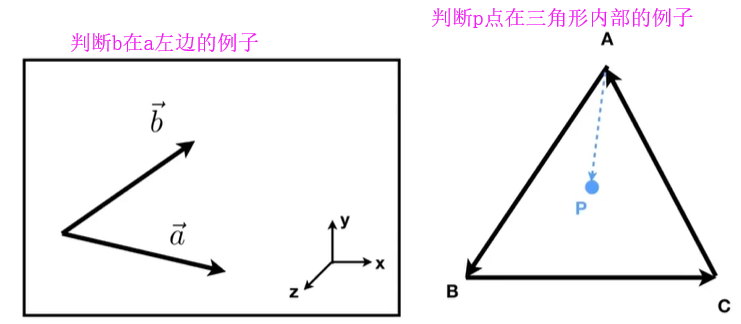
如图,a×b叉乘结果是正的,说明b在a的左边
p点在每条边的左边(或者右边) -
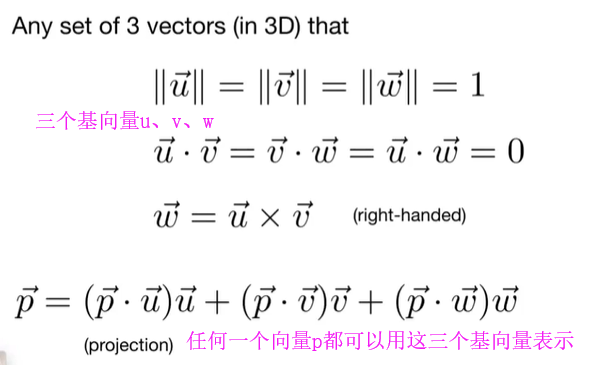
正交坐标系orthonormal coordinate frames
lecture 03:变换-1
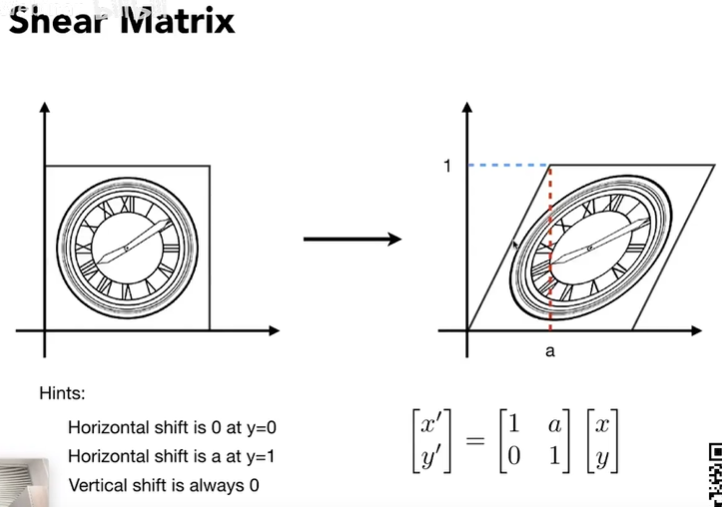
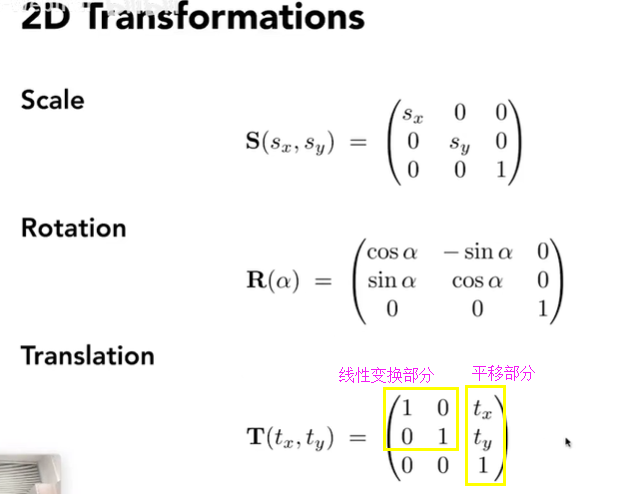
切片变换
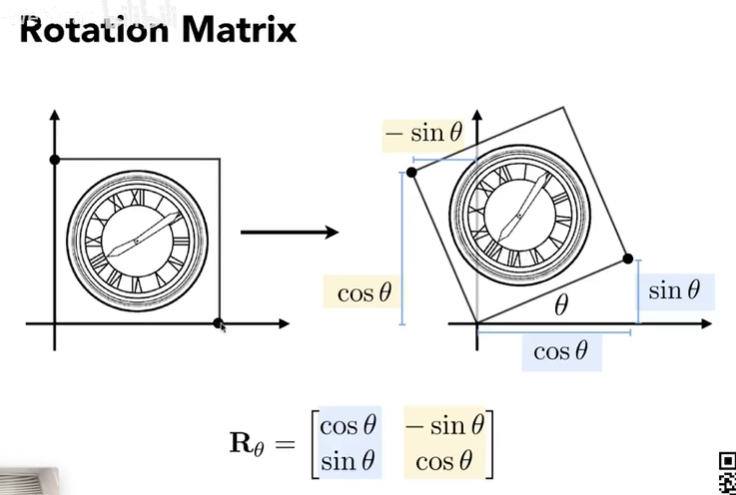
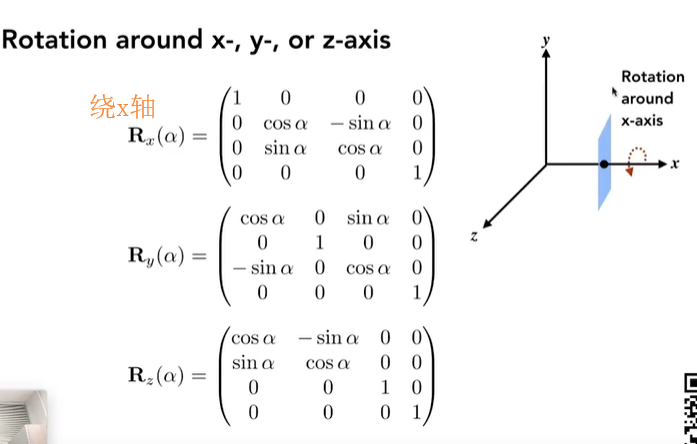
旋转变换
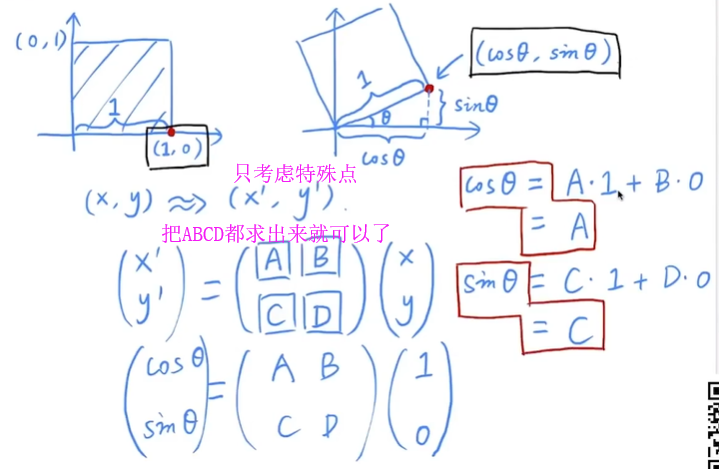
旋转变换的推导(不用记,知道就行)
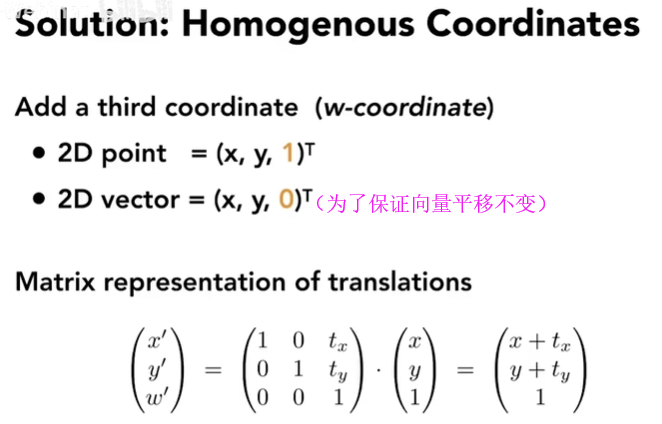
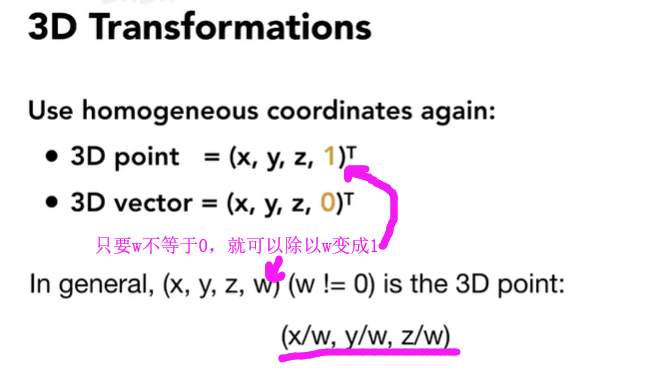
齐次坐标
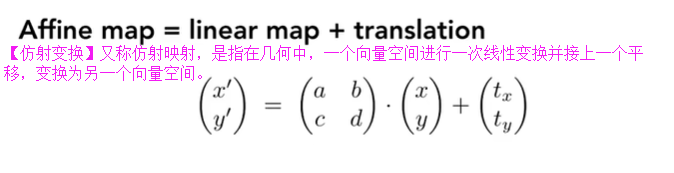
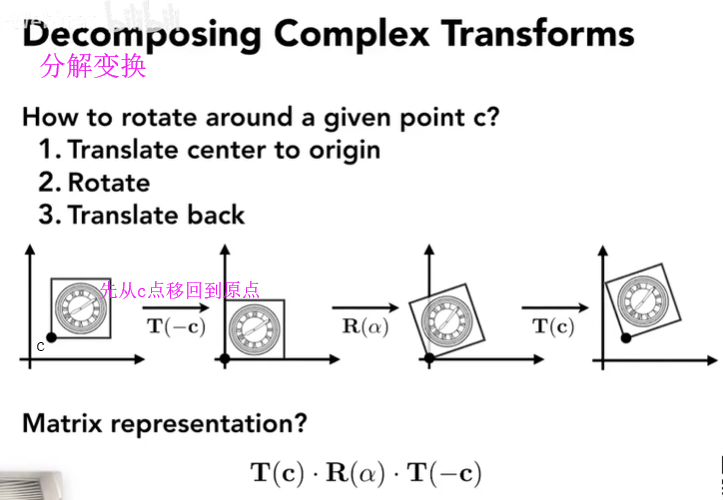
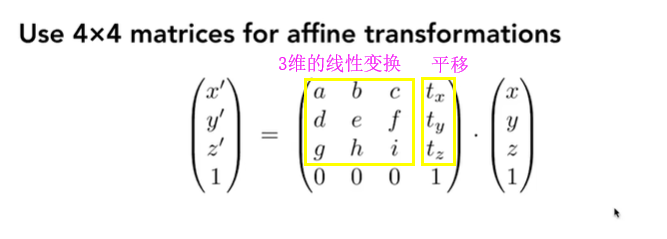
先线性变换再平移
引入目的:为了把平移变换(仿射变换)也能用两个矩阵相乘来表示
其他变换在齐次坐标下的表示:
3D情况下也是一样的原理:
lecture 04:变换-2
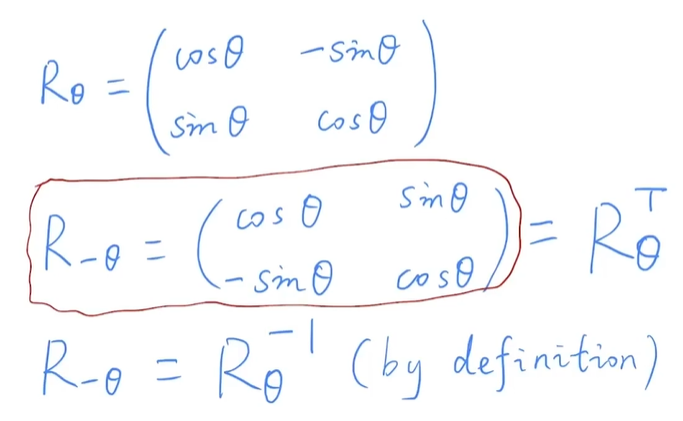
旋转矩阵是正交矩阵
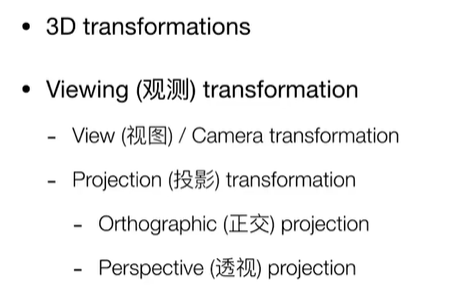
课程内容:
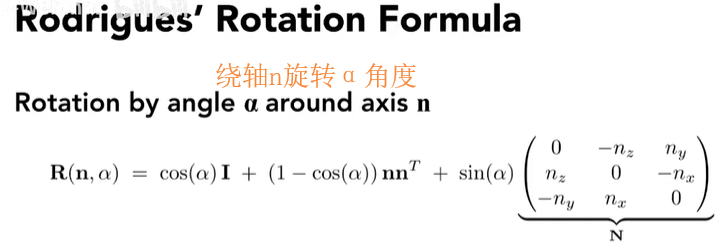
三维空间中的旋转:(下面两个都没看懂)
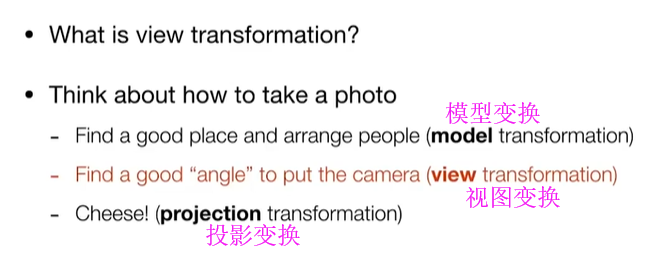
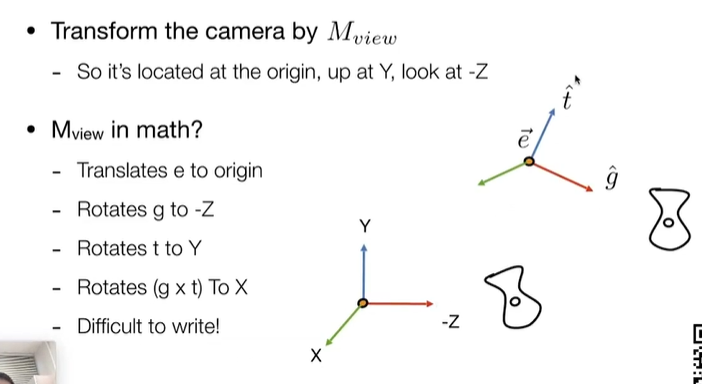
视图变换 View transformation
(即相机变换)
是什么?
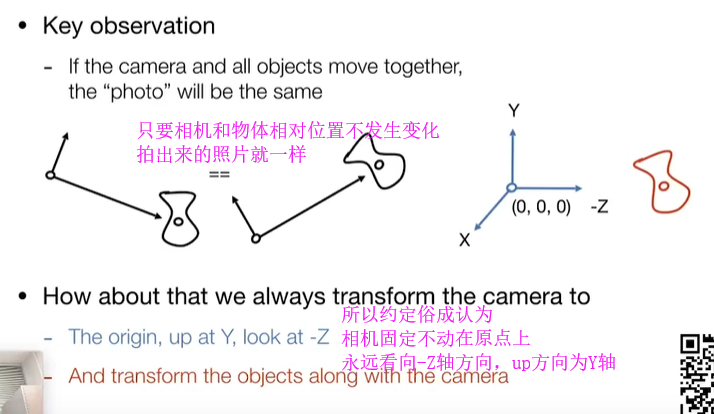
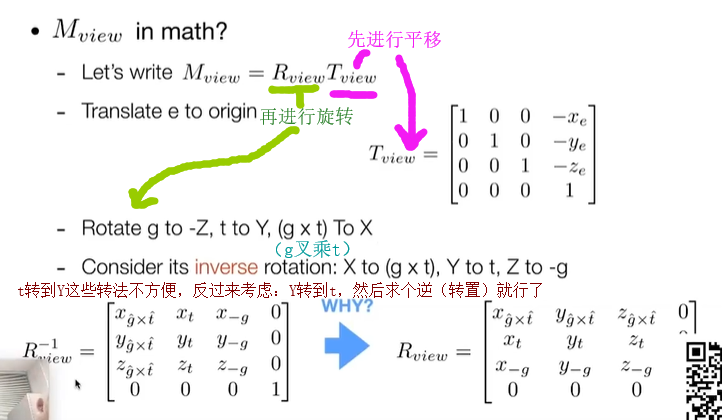
怎么做?:把etg坐标轴移动到xyz坐标轴,物体也跟着移动
数学表达式:(最后棕色的那个原理是旋转矩阵是正交矩阵)
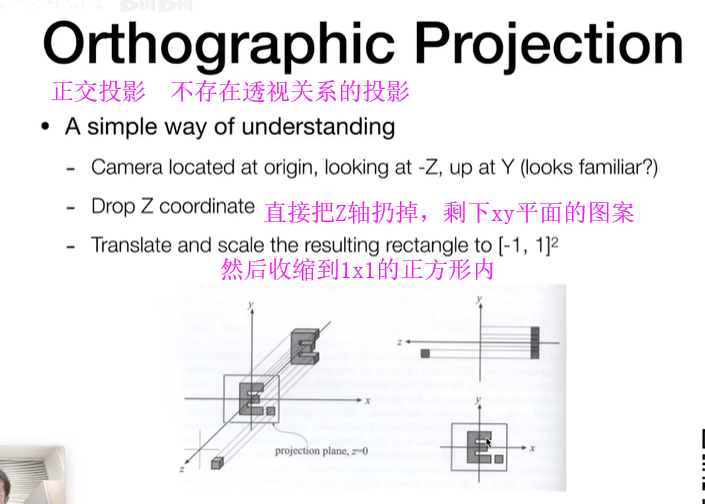
投影变换
正交投影
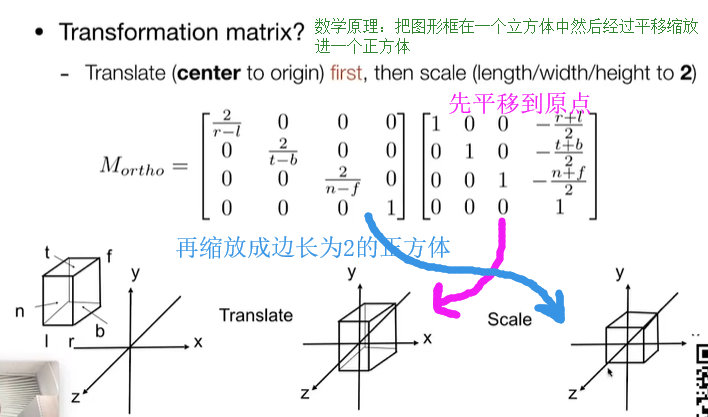
数学的矩阵表示
立方体t代表top,b是bottom,lr是左和右,nf分别是near和far
透视投影
准备:
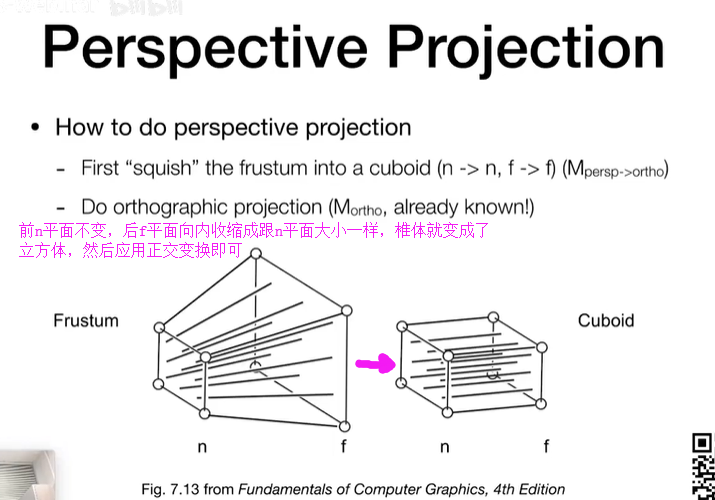
其中挤压矩阵的推导在视频的最后一部分,这里没贴出来。















 1332
1332











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









