






前言
本文利用现代控制理论方法,建立倒立摆系统模型,对系统进行分析,并且使用PID控制和状态反馈控制,使系统成为稳定系统。
系统模型建立
倒立摆是机器人学中一个非常重要的模型, 如图所示的倒立摆系统。 现在要研究外力 F 如何能使摆保持垂直的位置。
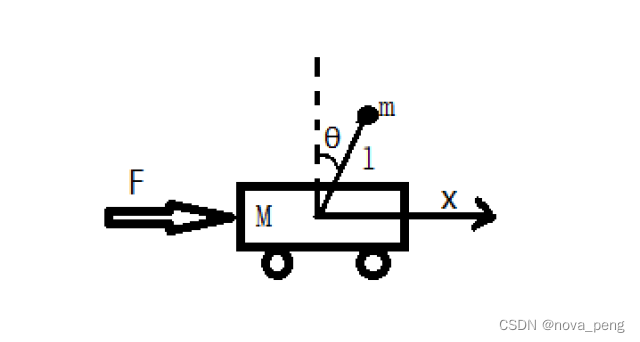
倒立摆相关参数符号和说明:
| 变量 | 说明 |
|---|---|
| F | 输入外力(N) |
| M | 小车质量(kg) |
| Θ | 摆杆旋转角度(rad) |
| m | 小球质量(kg) |
| x | 小车水平移动距离(m) |
| l | 摆杆长度(忽略摆杆质量)(m) |
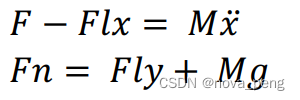
对小车进行受力分析:
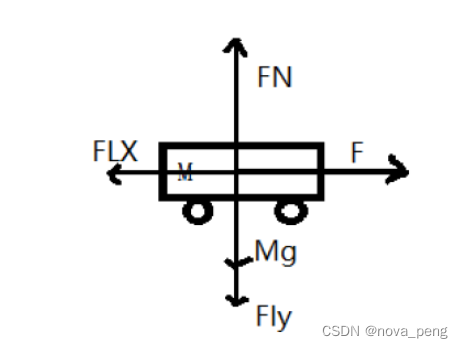
FN 为地面对小车的力, Flx 为杆对小车的横向力, F 为外力, Fly 为杆对小车竖
直方向的力, Mg 为小车重力。则有:
对摆进行受力分析: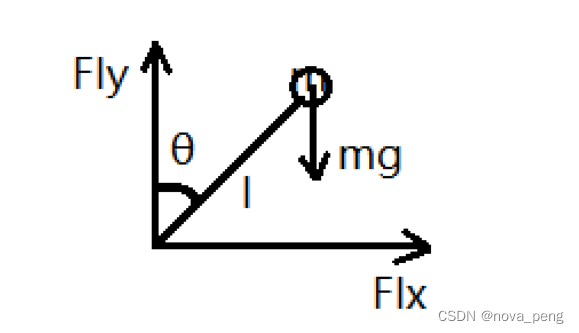
Flx 为小车对杆的横向力, Fly 为小车对杆竖直方向的力, mg 为小车重力。 根据力和力矩方程, 有:

联立上述公式:

在平衡点 Θ = 0 附近线性化,有: 𝜃 = 𝑠𝑖𝑛𝜃, 𝑐𝑜𝑠𝜃 = 1, 𝜃̇’ = 0
系统方程:

定义状态变量:

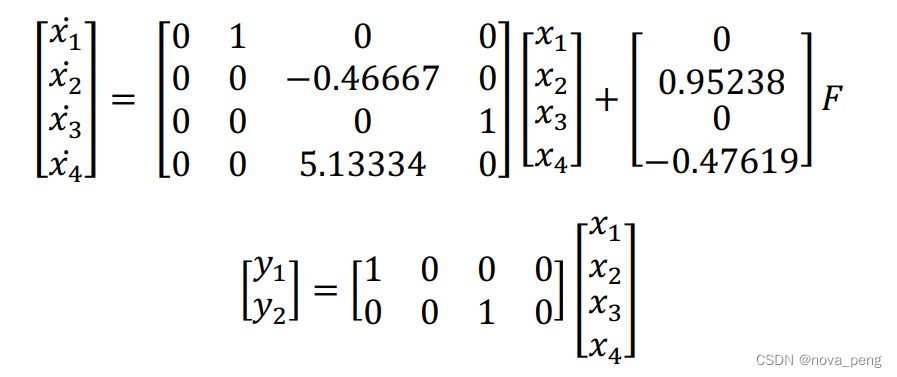
得到系统状态空间方程:
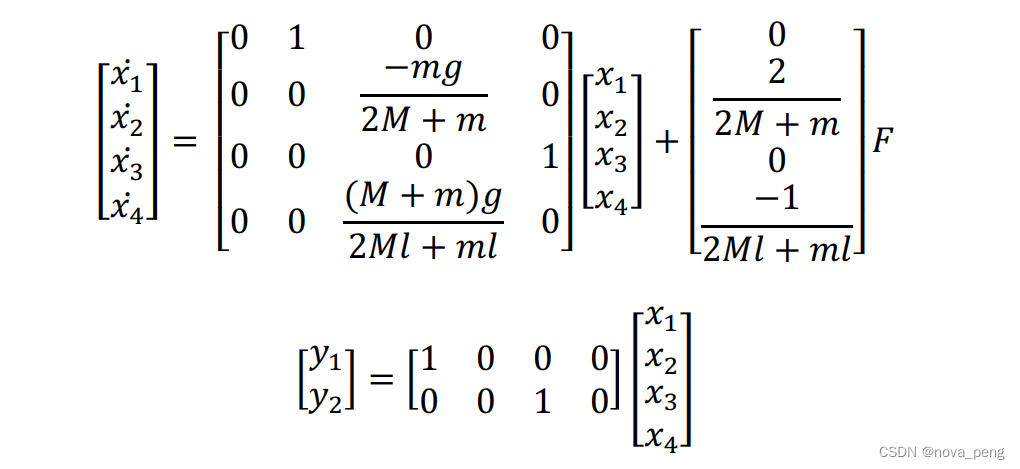
为方便起见,取: 𝑀 = 1 𝑘𝑔; 𝑚 = 0.1 𝑘𝑔; 𝑔 = 9.8 𝑚/𝑠2; 𝑙 = 1 𝑚;
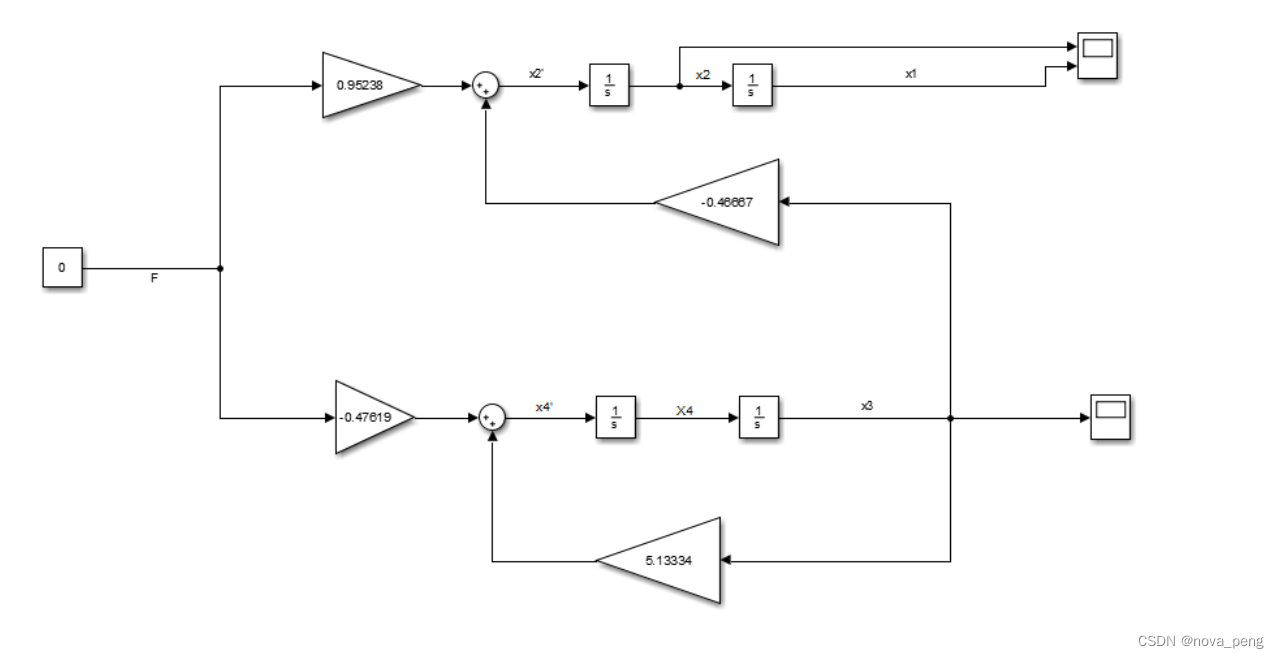
系统模拟结构图如下:
系统能控能观性和稳定性分析
系统能控性矩阵:
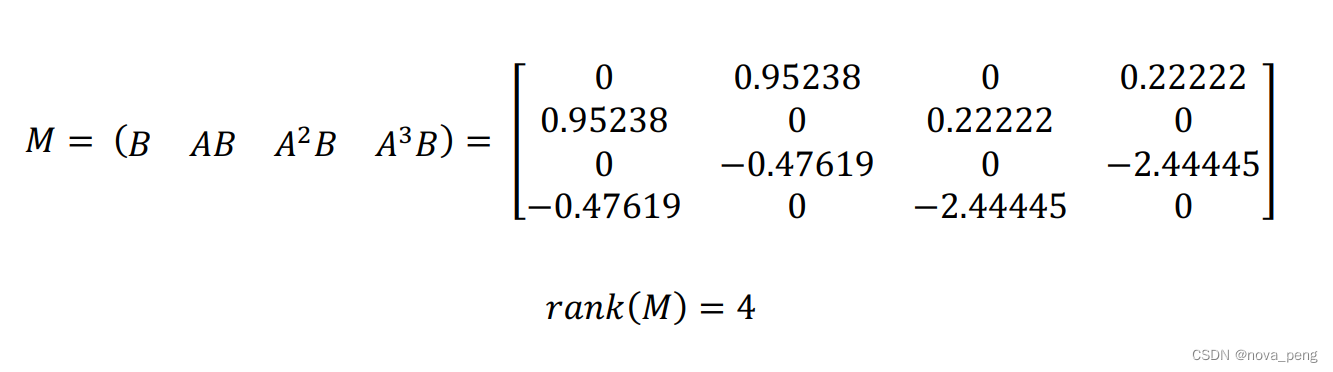
系统完全能控。
系统能观性矩阵: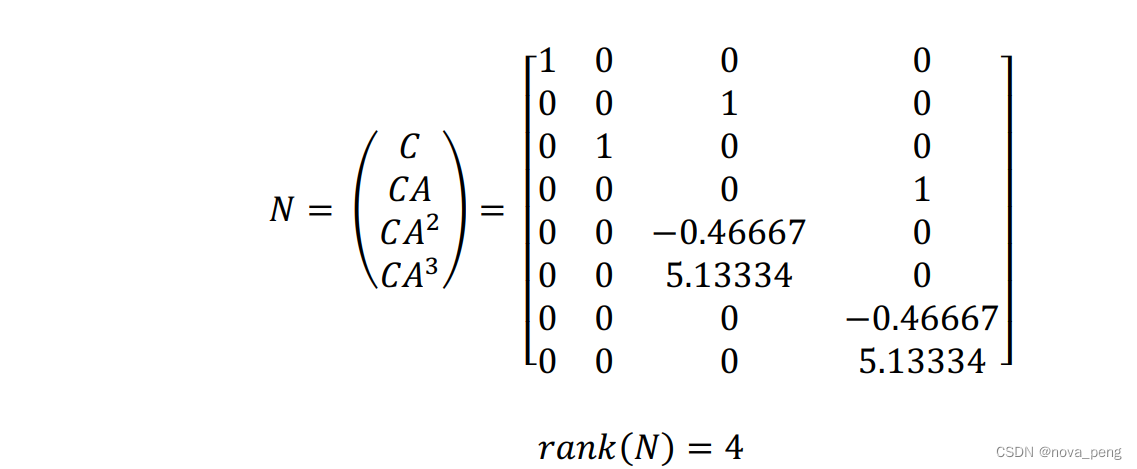
系统完全能观。
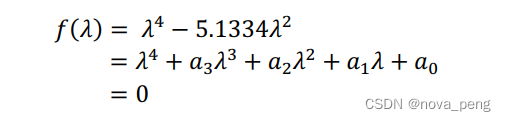
系统矩阵 A 的特征方程:
可得特征值: 
由特征值可见, 系统是不稳定的。
使用 PID 控制器控制系统
使用 PID 控制器控制𝜃。
由输入 F 到输出𝜃的传递函数:
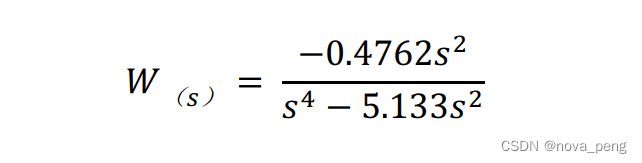
系统不稳定。
使用 PID 控制器后系统模拟结构图: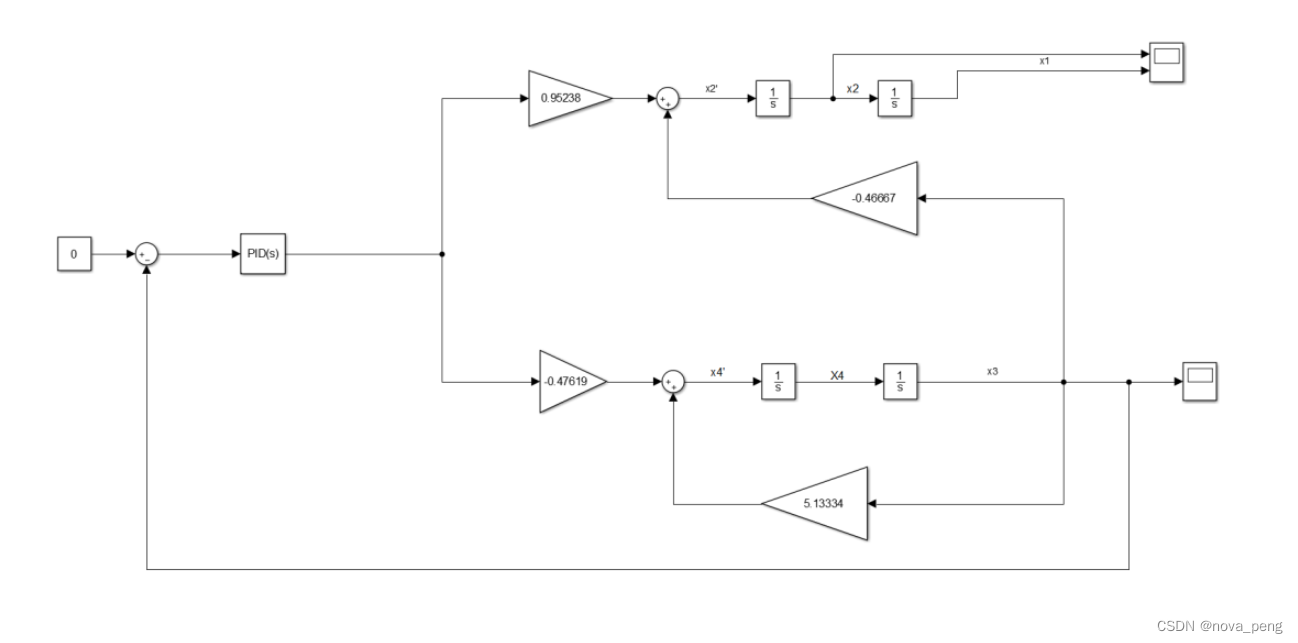
取 PID 的传递函数:

则系统传递函数:

系统极零点图:
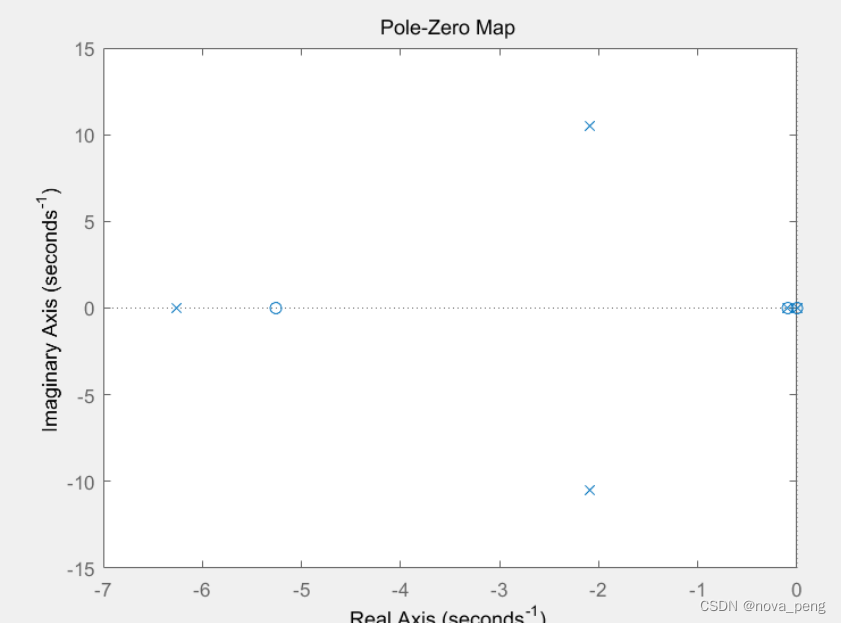
可以看到系统所有极点都具有负实部,系统稳定。
在初始角度为 5° 的情况下,系统能控制角度到零度。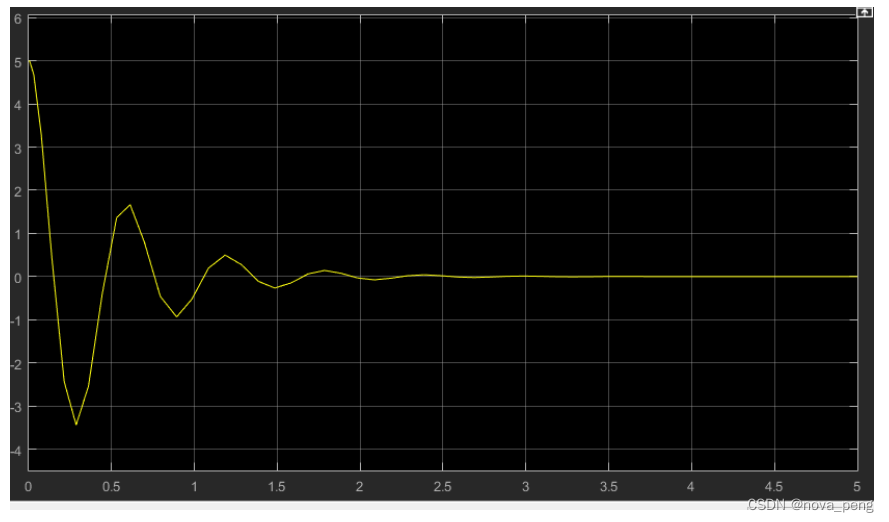
改变输入,发现输出能对输入进行跟踪,即达到了通过 PID 控制器控制角度的目的。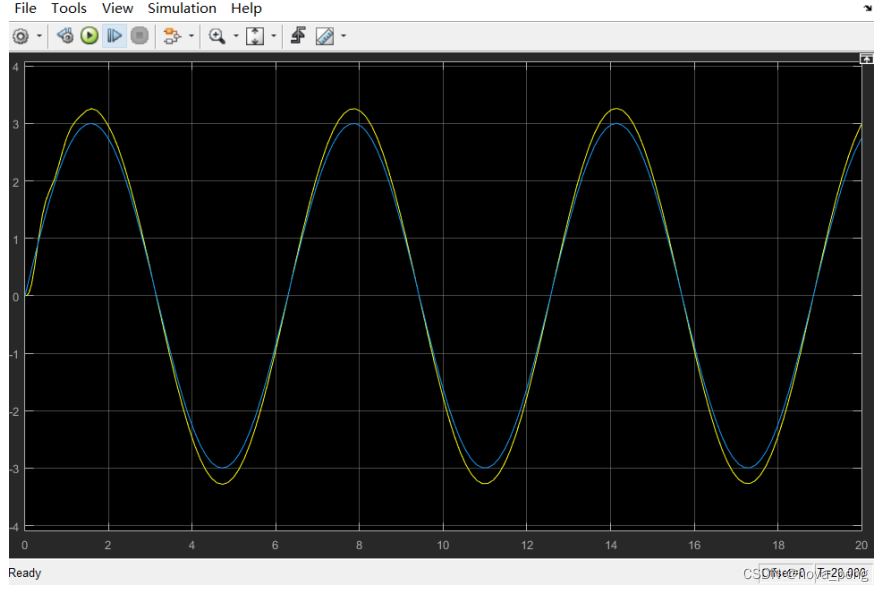
使用状态反馈控制
系统矩阵 A 的特征方程:
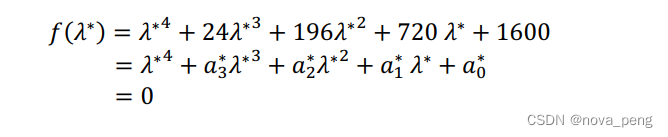
为使系统具有良好的性能, 取目标极点为:

期望特征多项式:
系统转换为能控标准Ⅰ 型的变换矩阵 Tc: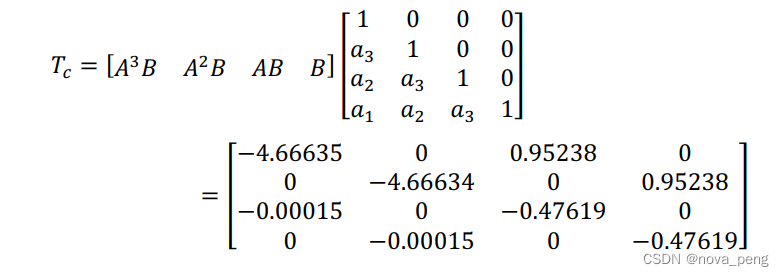
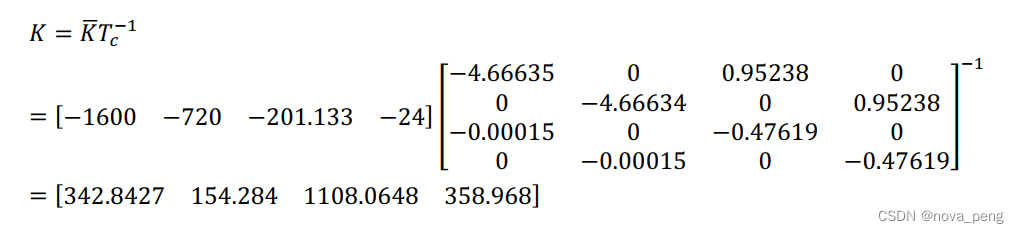
能控标准Ⅰ 型状态反馈转移增益矩阵𝐾̅:

对应于系统矩阵 A,状态 x 的状态反馈转移增益矩阵 K:
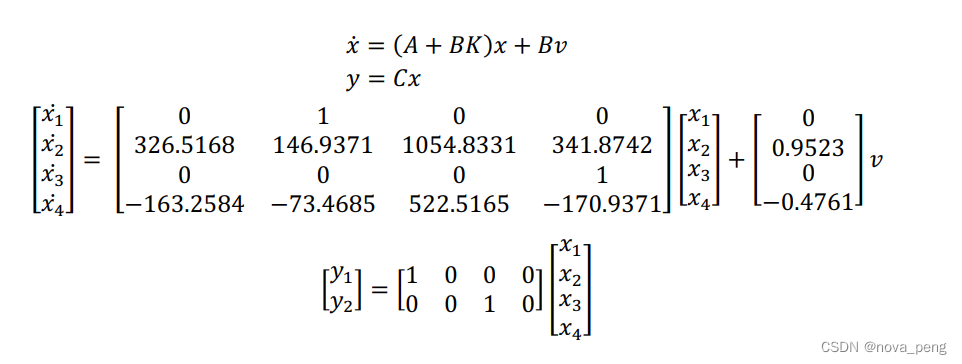
加入状态反馈后系统状态空间方程:
系统矩阵的特征方程:

可得特征值:

与预期一致,系统稳定。
加入状态反馈后系统模拟结构图:
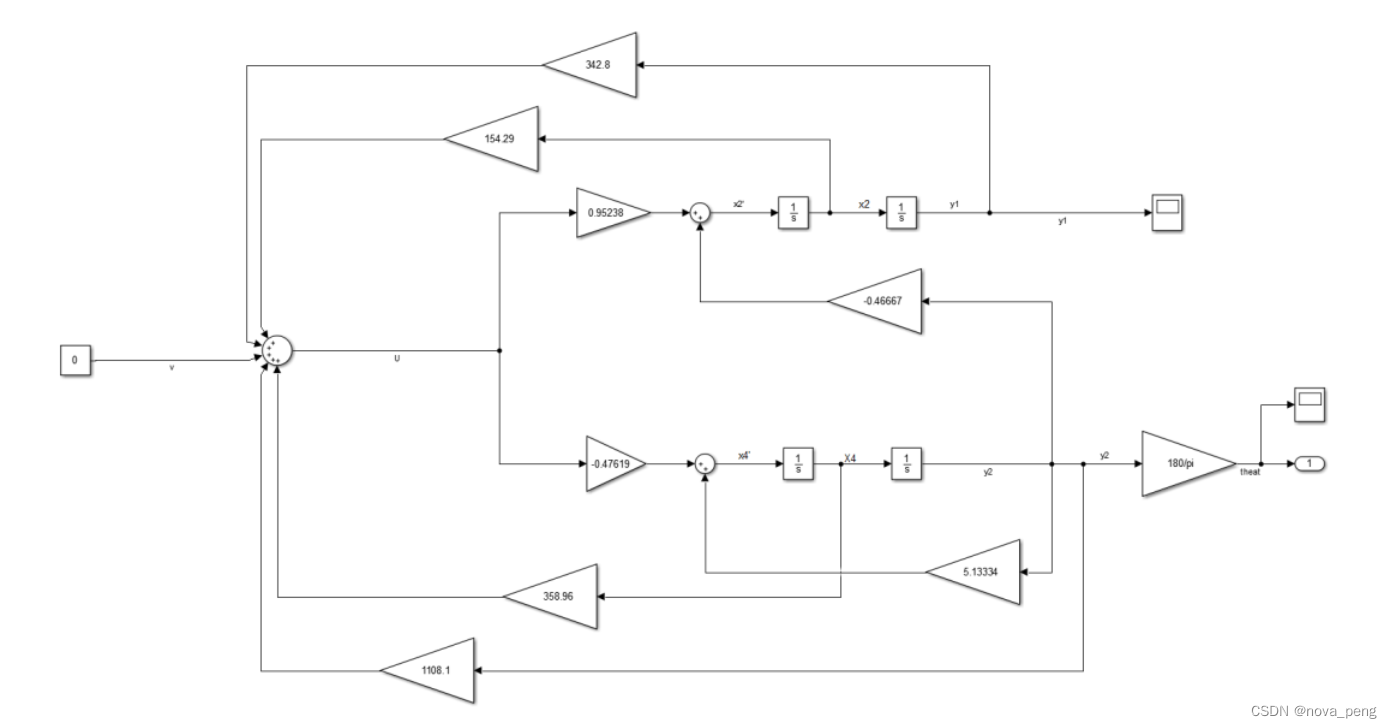
在初始角度 5° 的情况下, 偏离角度在很短时间内收敛到 0。
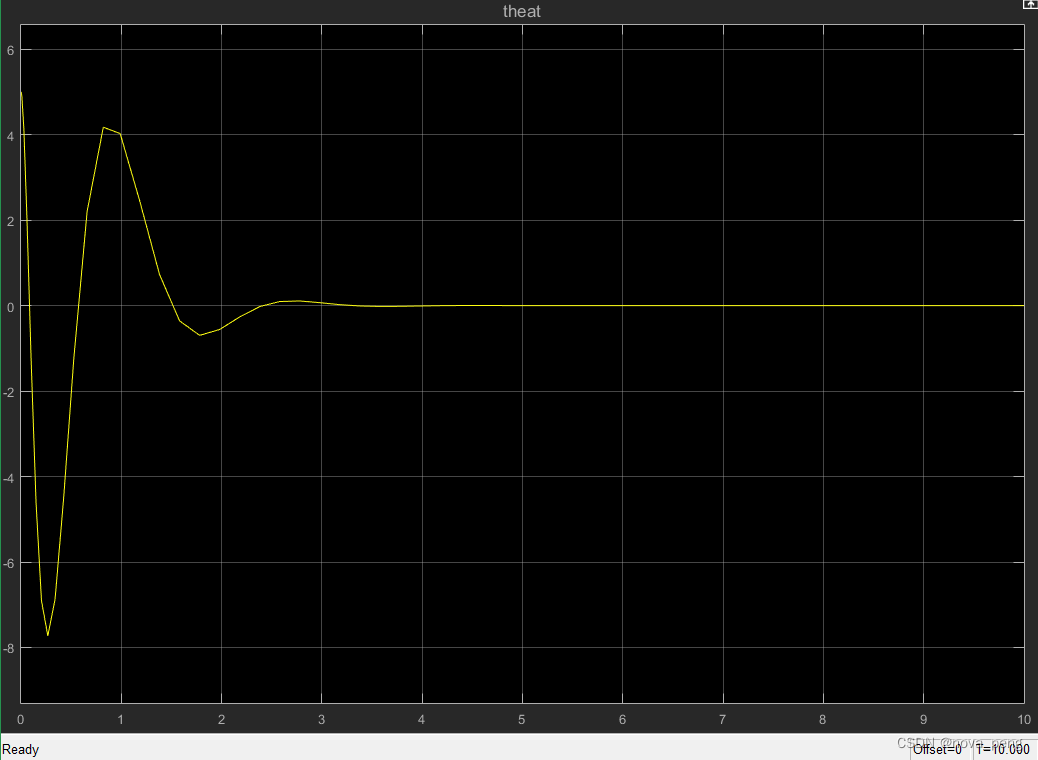
通过极点配置,使得系统稳定,能回到平衡点。
总结
通过对倒立摆系统建立数学模型,然后分别使用 PID 控制器控制和状态反馈控制, 实现了通过控制外力 F,进而控制摆杆角度θ的目的。
在 PID 控制中,虽然找到了 PID 的传递函数,使得系统稳定,并且可以控制角度θ ,但寻找合适的 PID 参数的过程过于繁琐,需要花费大量时间。同时因为 PID 单输入单输出的特性, 控制过程中只用了θ , 也只控制θ ,没有利用其它状态变量,造成数据浪费。 能否对单 PID 控制器控制方法进行改进,根据状态变量间的导数关系,采用串级 PID,实现对系统更加简便、精准的控制。
在状态反馈控制中,通过计算状态反馈转移增益矩阵 K,实现了极点配置,系统能回到平衡点。 极点配置的过程相对容易,没有 PID 那样繁琐。 状态反馈时使用了四个状态变量, 在实际的应用中, 通常不会使用这么多传感器, 因此, 可以设计降维观测器,通过观测器观测出一部分状态变量,从而减少传感器的使用。 虽然系统能够稳定在原点, 但要系统能够按照我们的指令到达任意位置, 仅仅使用状态反馈是不行的, 尝试对系统进行状态反馈解耦,实现对系统的任意位置控制。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









