






一、激光三角算法的基本原理
原文(n次方):https://zhuanlan.zhihu.com/p/88301570
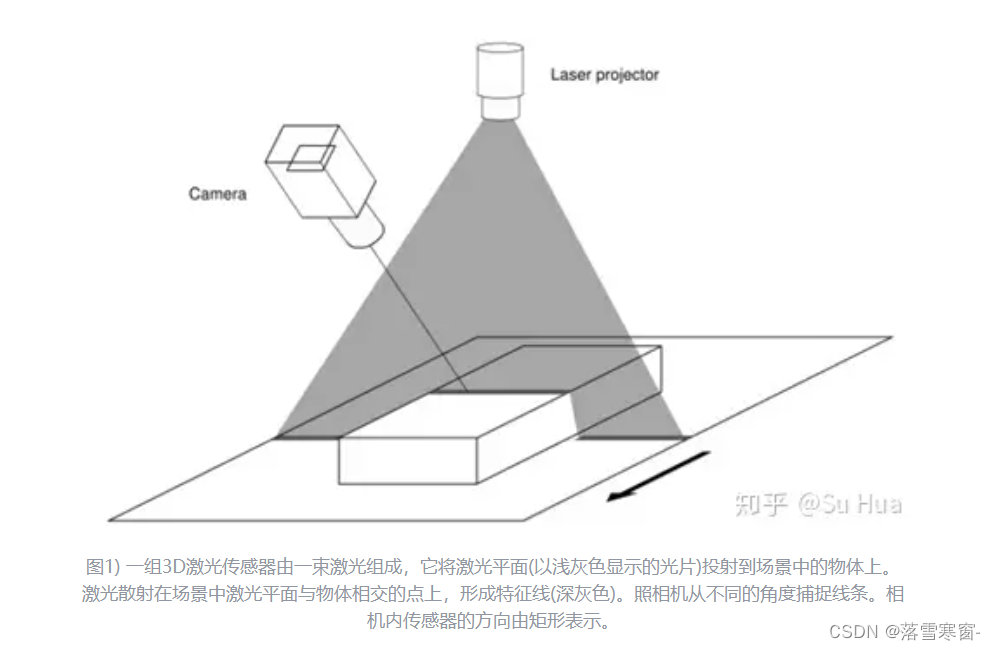
如下图所示,相机通过采集激光的结构光,通过计算结构光的3D坐标实现3D成像。
二、计算结构光的3D坐标
- 条件
相机的成像的大小是统一的;激光的结构由于亮度很高;通过灰度转黑白的方式容易提取;我们以图片的左下角作为原点(0,0,0) - 计算
X轴(平行结构光的轴):通过图片的像素坐标可以获得
Y轴(在被测物平台垂直结构光的轴):通过图片的像素坐标可以获得
Z轴(垂直与被测物平台的轴):z轴的获取是3D成像的重点,下面进行分析
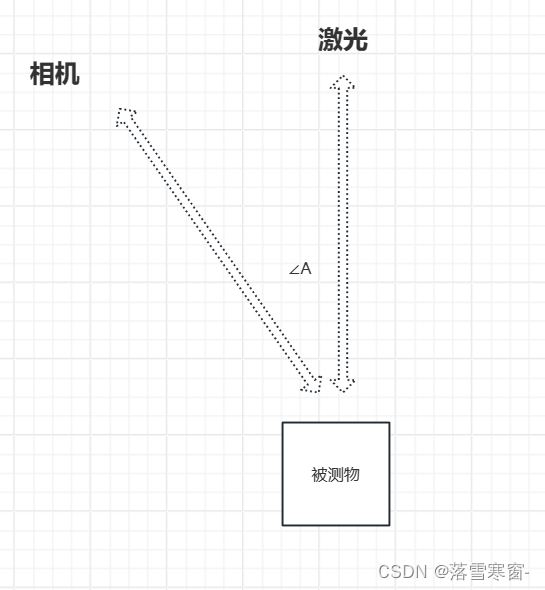
a. 首先相机的拍摄角度与激光的夹角是一个确定值∠A
b、最终成像实际可以看作激光在被测平台上的倒影
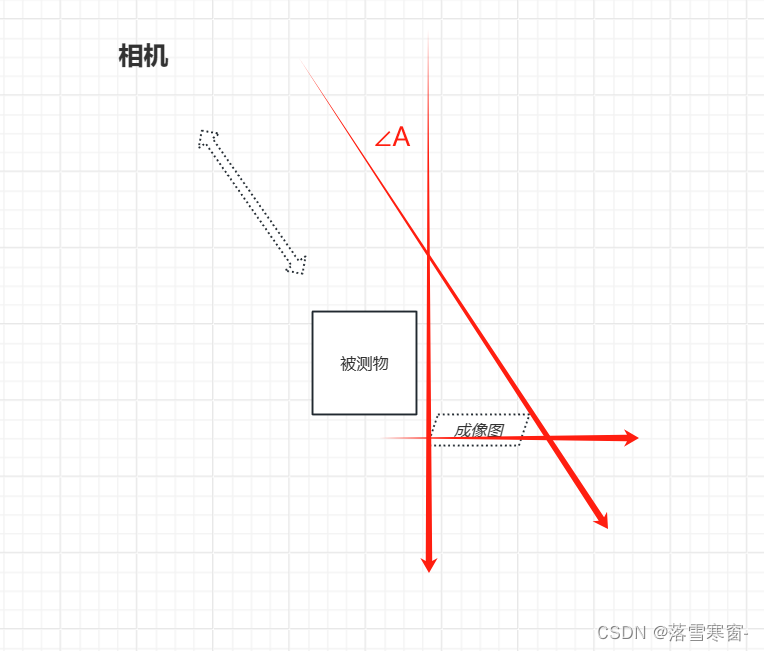
c、通过三角函数公式 a / sin(A) = b / sin(B) = c / sin( C)计算出被测物高度,从而确定被测物的z轴坐标
成像图长度 / sin(∠A) = Z轴坐标 / sin(90° - ∠A)
一元一次方程计算出Z轴坐标

















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











