






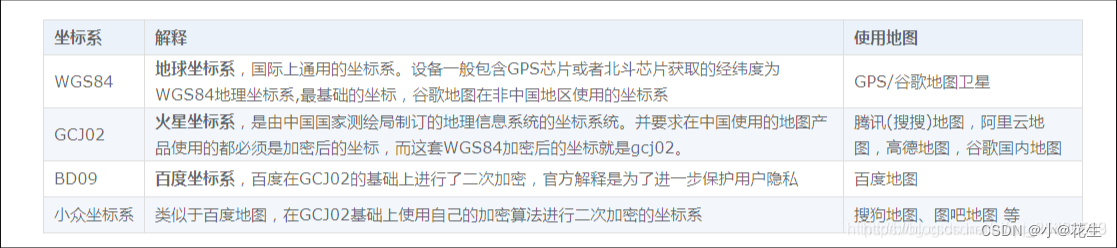
在嵌入式开发中常会用到定位数据和地图功能,都会知道位置信息会有多个坐标系来表示,而不同地图厂商使用的坐标系也可能是不一样的,这就出现了在不同坐标系间转换坐标的需求。
应用需求:(1)一般GPS厂商提供的硬件设备,经过串口等工具获取的数据多为WGS84坐标系下的经纬度坐标。而我们使用的地图服务中,往往可能不是WGS84坐标系;(2)一些地图SDK给出的地图坐标转换接口的实现是在服务器进行的,那么这些接口的调用不但会发起网络请求而效率上也会非常的慢。以上两点,就需要本地实现坐标转换的算法来满足快速运算的需求。
1.GPS转换代码如下:
#include <math.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdbool.h>
#include <stdio.h>
const double pi = 3.14159265358979324;
const double a = 6378245.0;
const double ee = 0.00669342162296594323;
const double x_pi = 3.14159265358979324 * 3000.0 / 180.0;
#define port_abs(x) ((x > 0) ? (x) : ((x) * -1))
bool outOfChina(double lat, double lon)
{
if (lon < 72.004 || lon > 137.8347)
return true;
if (lat < 0.8293 || lat > 55.8271)
return true;
return false;
}
double transformLat(double x, double y)
{
double ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * sqrt(port_abs(x));
ret += (20.0 * sin(6.0 * x * pi) + 20.0 * sin(2.0 * x * pi)) * 2.0 / 3.0;
ret += (20.0 * sin(y * pi) + 40.0 * sin(y / 3.0 * pi)) * 2.0 / 3.0;
ret += (160.0 * sin(y / 12.0 * pi) + 320 * sin(y * pi / 30.0)) * 2.0 / 3.0;
return ret;
}
double transformLon(double x, double y)
{
double ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * sqrt(port_abs(x));
ret += (20.0 * sin(6.0 * x * pi) + 20.0 * sin(2.0 * x * pi)) * 2.0 / 3.0;
ret += (20.0 * sin(x * pi) + 40.0 * sin(x / 3.0 * pi)) * 2.0 / 3.0;
ret += (150.0 * sin(x / 12.0 * pi) + 300.0 * sin(x / 30.0 * pi)) * 2.0 / 3.0;
return ret;
}
/* 地球坐标转换为火星坐标,即WGS84(国际通用)转为GCJ02坐标系适用于腾讯地图、高德(阿里)地图或谷歌地图 */
void WGS84toGCJ02(double wgLat, double wgLon, double *gcjLat, double *gcjLon)
{
if (outOfChina(wgLat, wgLon)) {
*gcjLat = wgLat;
*gcjLon = wgLon;
return;
}
double dLat = transformLat(wgLon - 105.0, wgLat - 35.0);
double dLon = transformLon(wgLon - 105.0, wgLat - 35.0);
double radLat = wgLat / 180.0 * pi;
double magic = sin(radLat);
magic = 1 - ee * magic * magic;
double sqrtMagic = sqrt(magic);
dLat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * pi);
dLon = (dLon * 180.0) / (a / sqrtMagic * cos(radLat) * pi);
*gcjLat = wgLat + dLat;
*gcjLon = wgLon + dLon;
}
/* 地球坐标转换为百度坐标,即WGS84(国际通用)坐标系转为BD09坐标系适用于百度地图 */
void WGS84toBD09(double wgLat, double wgLon, double *bdLat, double *bdLon)
{
double gcjLat, gcjLon;
WGS84toGCJ02(wgLat, wgLon, &gcjLat, &gcjLon);
double z = sqrt(gcjLon * gcjLon + gcjLat * gcjLat) + 0.00002 * sin(gcjLat * x_pi);
double theta = atan2(gcjLat, gcjLon) + 0.000003 * cos(gcjLon * x_pi);
*bdLat = z * sin(theta) + 0.006; // #0.006 #0.01205
*bdLon = z * cos(theta) + 0.0062; // #0.0065 #0.00370
}
/* 火星坐标转换为百度坐标 */
void GCJ02toBD09(double gcjLat, double gcjLon, double *bdLat, double *bdLon)
{
double x = gcjLon, y = gcjLat;
double z = sqrt(x * x + y * y) + 0.00002 * sin(y * x_pi);
double theta = atan2(y, x) + 0.000003 * cos(x * x_pi);
*bdLon = z * cos(theta) + 0.0065;
*bdLat = z * sin(theta) + 0.006;
}
/* 百度转火星 */
void BD09toGCJ02(double bdLat, double bdLon, double *gcjLat, double *gcjLon)
{
double x = bdLon - 0.0065, y = bdLat - 0.006;
double z = sqrt(x * x + y * y) - 0.00002 * sin(y * x_pi);
double theta = atan2(y, x) - 0.000003 * cos(x * x_pi);
*gcjLon = z * cos(theta);
*gcjLat = z * sin(theta);
}
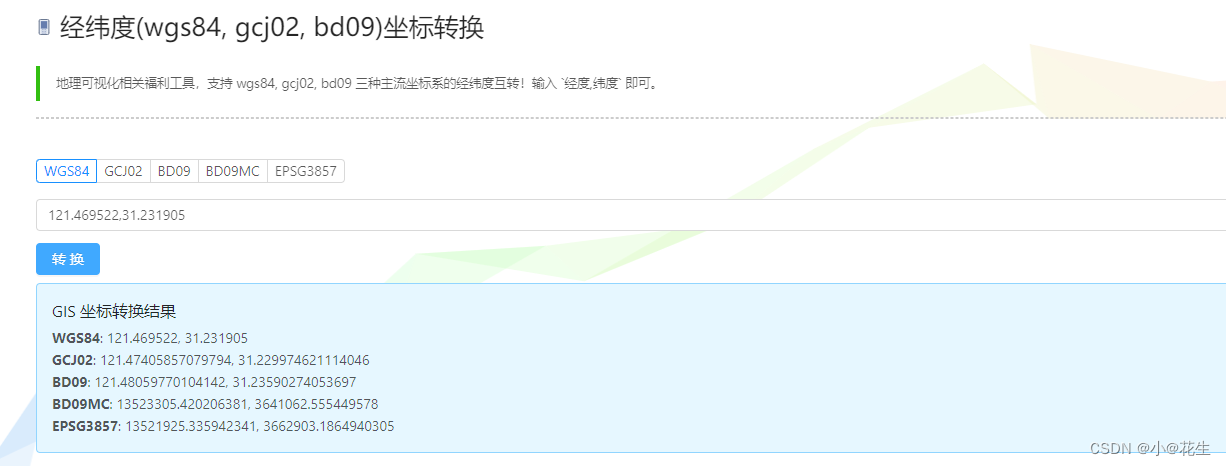
/*
GS84坐标系 121.469522,31.231905
GCJ02坐标系 121.47405857079794,31.229974621114046
BD09坐标系 121.48055338931275,31.235941661557085
*/
int main(void)
{
double wgsLat = 31.231905;
double wgsLon = 121.469522;
double gcjLat = 0, gcjLon = 0;
double bdLat = 0, bdLon = 0;
WGS84toGCJ02(wgsLat, wgsLon, &gcjLat, &gcjLon);
printf("WGS84toGCJ02:%lf-%lf >>> %.14lf-%.14lf\n", wgsLon, wgsLat, gcjLon, gcjLat);
WGS84toBD09(wgsLat, wgsLon, &bdLat, &bdLon);
printf("WGS84toBD09:%lf-%lf >>> %.14lf-%.14lf\n", wgsLon, wgsLat, bdLon, bdLat);
GCJ02toBD09(gcjLat, gcjLon, &bdLat, &bdLon);
printf("GCJ02toBD09:%lf-%lf >>> %.14lf-%.14lf\n", gcjLon, gcjLat, bdLon, bdLat);
BD09toGCJ02(bdLat, bdLon, &gcjLat, &gcjLon);
printf("BD09toGCJ02:%lf-%lf >>> %.14lf-%.14lf\n", bdLon, bdLat, gcjLon, gcjLat);
return 0;
}编译运行结果在线对比:




















 8085
8085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









