







1.分水岭概念
分水岭法是根据像素灰度值之间的差值寻找相同区域以实现分割的算法。我们可以将灰度值理解成像素的高度,这样一张图像可以看成崎岖不平的地面或者山区。向地面低洼的地方倾倒一定量的水,水将会掩盖低于某个高度的区域。
分水岭法是从全局来看,在多个局部最低点注水,随着注水量的增加,水位越来越高,会“淹没”局部像素值较小的值,最后两个相邻凹陷区域中的水会汇集在一起,而在汇集处形成了分水岭,为了防止水汇集,就会在汇集处建造屏障,你继续填满水,继续建造屏障,直到所有山峰都在水的下面,你所建造的屏障会被当成边缘返回。
2. 分水岭处理步骤
语法:result_img = cv2.watershed(img, masker)
img:原图
masker:分水岭的种子信息,包括前景,背景,和未知区域,通读全文后理解的更加深刻。
result_img:分割后的图片,边缘用像素值-1来标识
- 找到背景并标记背景
- 找到前景并标记前景
- 标记未知区域(即边缘)
- 构造好marker
- 进行分割
3. 代码示例
3.1 图像二值化
当图像稍微复杂时,可以使用openCV提供的自适应阈值的方式来二值化,这样可以避免自己选取的不精确。
# 首先将图像二值化
img = cv2.imread('./image/water_coins.jpeg')
gary = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 第四个参数是自适应阈值,让算法自己找合适的部分
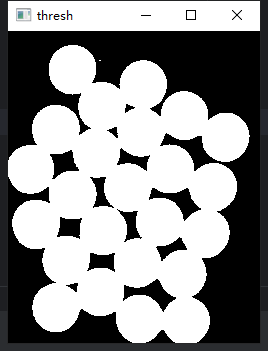
ret1, thresh = cv2.threshold(gary, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
二值化后的图像:
3.2 形态学运算
通过形态学运算去除硬币里的噪点,然后将硬币膨胀,使得背景背景缩小,保证一定是背景。
# 开运算,首先将硬币里的噪点去除
kernel = np.ones((3, 3), np.int8)
open1 = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)
# 膨胀(为了扩大硬币,缩小背景),保证背景区域一定是背景
bg = cv2.dilate(open1, kernel, iterations=1)
3.3 获取前景
距离硬币中心越远,越有可能是背景;距离硬币中心越近,越有可能是前景。
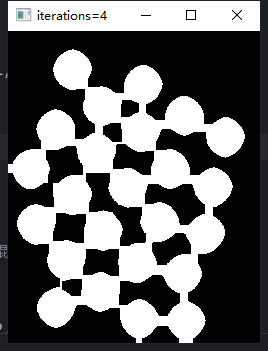
按理来说可以通过腐蚀,使得硬币减小,从而得到的前景一定是硬币,但是硬币有挨着的情况,使用腐蚀并不能很好的区分这种情况。如下图:腐蚀四次结果,仍不能很好的将硬币去区分开。
通过距离变换获取前景:
在二维空间中,一幅二值图像可以认为仅仅包含目标和背景的两种像素,目标的像素值为1,背景的像素值为0;距离变换的结果不是二值图像,而是一幅灰度级图像,即距离的图像,图像中每个像素的灰度值为该像素(1)与距其最近的背景(0)像素间的距离。
语法:dist = cv2.distanceTransform(img, distanceType, maskSize)
img:要计算距离的二值图像
distanceType:距离类型,计算距离的方式:DIST_L1(按绝对值来算距离),DIST_L2(勾股定理来算距离)
maskSize:kernel的大小,L1用3,L2用5

# 获得前景(缩小硬币全区域),保证硬币的地方一定是硬币(不会跟边界混淆)
dist = cv2.distanceTransform(open1, cv2.DIST_L2, 5)
# 超过最大值的百分之70才算
ret2, fg = cv2.threshold(dist, 0.7*dist.max(), 255, cv2.THRESH_BINARY)
# 用matplotlib来绘出图像,就是距离背景越远越亮
# plt.imshow(dist, cmap='gray')
# plt.show()
# exit()
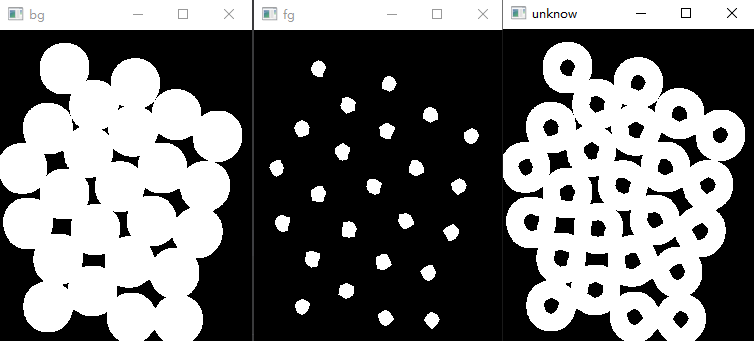
如下图:前景(硬币)中心距离背景最远,因此中心最亮,把大于百分之70的距离设置为前景。

3.4 获取边缘(未知区域)
背景和前景作差就得到了边缘图像。(如果我们不求边缘,我们可以直接利用腐蚀来求,不需要距离变换函数)
# 获取未知区域,即边缘一定在未知区域
fg = np.uint8(fg)
unknow = cv2.subtract(bg, fg)
3.5 构建marker
分水岭法最关键的就是构建好marker。首先通过连通域函数找连通域目的是将连通分支的像素点设置为非0,将背景设置为0。但是如果把背景设置为0,分水岭函数会把0当成未知区域,因此我们再把整体加1,保证背景不是0,然后把未知区域设为0即可。
求连通分支的函数
语法:num_objects, labels = cv2. connectedComponents(img)
img:输入的图像,必须是二值图,即8位单通道图像。
num_objects:连通域的数目
labels:图像上每一个像素的标记,用数字1、2、3…表示(不同的数字表示不同的连通域),0表示背景。
# 计算连通域,构造marker
ret, marker = cv2.connectedComponents(fg)
# marker 的像素点都加1
marker = marker + 1
# 只把未知区域标记为0
marker[unknow==255] = 0
3.6 图像分割
根据构建好的marker进行图像分割。分水岭函数会把边缘的像素值标记为-1,因此我们最后只需将边缘的像素绘制颜色即可。
# 分水岭
result = cv2.watershed(img, marker)
# 将边缘绘制为红色
img[result==-1] = [0, 0, 255]
最终效果图如下:

以上就是分水岭算法实战的全部内容,如有问题,欢迎留言评论区讨论。















 2730
2730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









