






分水岭算法思路
分水岭算法是一种经典的图像分割算法,用于将图像分割成具有语义或特征相似性的区域。其基本思想是将图像看作地势表面,通过拓扑原则来确定分割区域。
分水岭算法的主要流程如下:
-
读取图像并进行预处理:首先,读取待分割的图像,并对其进行预处理操作,例如灰度化、平滑化、二值化等。这些操作旨在减少噪声和强化图像特征。
-
计算梯度图像:通过计算图像的梯度图像,可以获取图像中的边缘信息。常用的方法是应用 Sobel 算子或其他边缘检测算法。
-
确定种子点:根据预处理后的图像或特定的标记方式,确定种子点。种子点是位于各个区域内部的像素点,它们将作为分割的起始点。
-
进行泛洪填充:从种子点开始,通过泛洪填充(Flood Fill)将不同的种子点的像素从低到高进行标记。这个过程可以看作是在进行水的泛滥过程,形成分割区域之间的分隔线。
-
标记边界:在进行泛洪填充的过程中,可能会出现重叠和混合的区域。因此,在完成泛洪填充后,需要对分割结果进行后处理,标记边界区域。
-
应用分水岭算法:通过将标记的图像作为输入,应用分水岭算法来进行最终的图像分割。该算法基于图像的拓扑结构和水坝原理,利用分水岭将不同的区域分隔开。
-
可选的后处理:根据需求,可以进行一些后处理操作,例如去除小区域、合并相似区域等,以得到最终的分割结果。
OpenCV实现了一个基于标记的分水岭算法,你可以指定哪些是要合并的山谷点,哪些不是。这是一个交互式的图像分割。我们所做的是给我们知道的对象赋予不同的标签。用一种颜色(或强度)标记我们确定为前景或对象的区域,用另一种颜色标记我们确定为背景或非对象的区域,最后用 0 标记我们不确定的区域。这是我们的标记。然后应用分水岭算法。然后我们的标记将使用我们给出的标签进行更新,对象的边界值将为 -1 。
代码流程和过程分析
import cv2 as cv
import numpy as np
# 读取图像并转为灰度图像
image = cv.imread('image.jpg')
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
# 对图像进行预处理
ret, thresh = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV + cv.THRESH_OTSU)
kernel = np.ones((3, 3), np.uint8)
opening = cv.morphologyEx(thresh, cv.MORPH_OPEN, kernel, iterations=2)
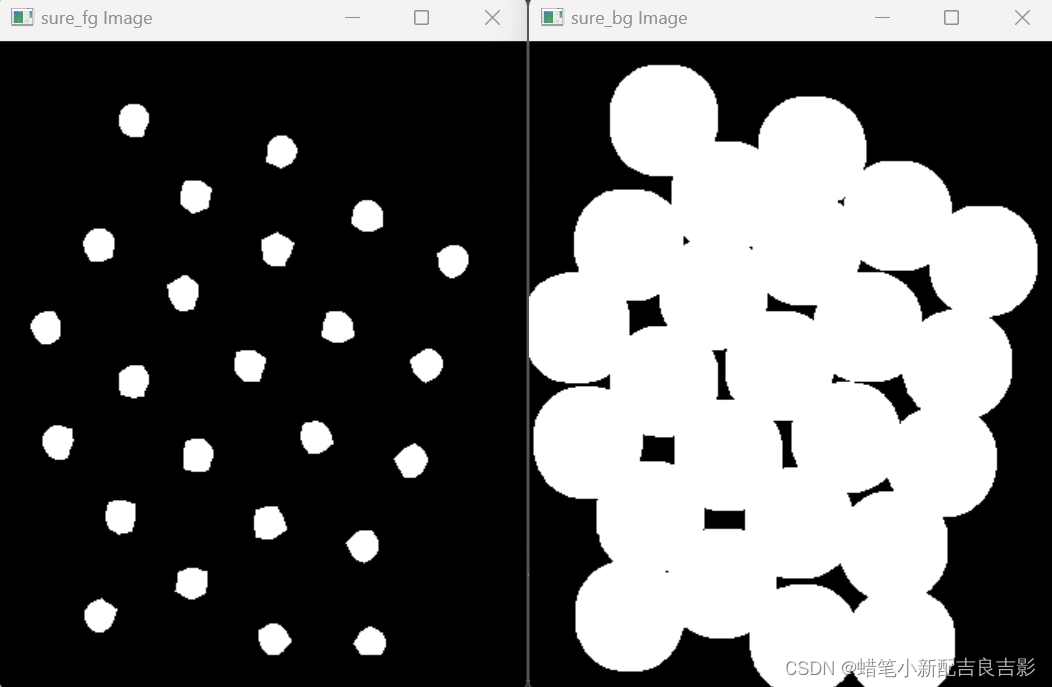
# 确定背景区域
sure_bg = cv.dilate(opening, kernel, iterations=3)
# 寻找未知区域
dist_transform = cv.distanceTransform(opening, cv.DIST_L2, 5)
ret, sure_fg = cv.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0)
sure_fg = np.uint8(sure_fg)
cv.imshow('sure_fg Image', sure_fg)
cv.imshow('sure_bg Image', sure_bg)
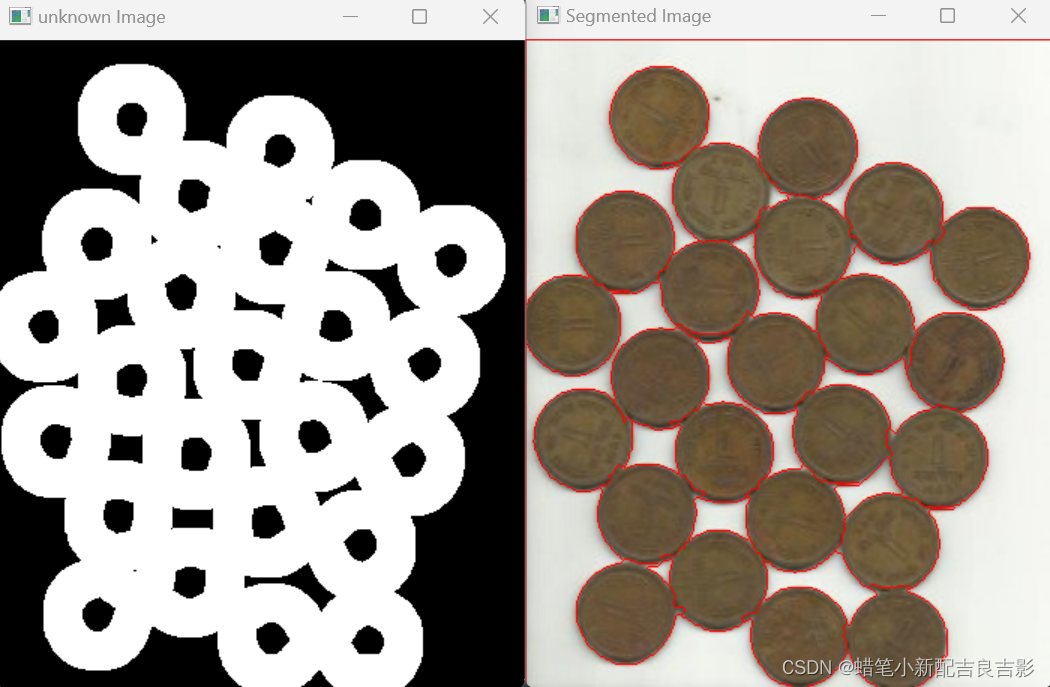
unknown = cv.subtract(sure_bg, sure_fg)
cv.imshow('unknown Image', unknown)
# 标记分水岭区域
ret, markers = cv.connectedComponents(sure_fg)
markers = markers + 1
markers[unknown == 255] = 0
# 应用分水岭算法
cv.watershed(image, markers)
image[markers == -1] = [0, 0, 255]
# 显示结果
cv.imshow('Segmented Image', image)
cv.waitKey(0)
cv.destroyAllWindows()
在分水岭算法中,标记分水岭区域是一个重要的步骤。这一步骤主要是对前面确定的前景(sure_fg)和未知区域(unknown)进行标记,以便应用分水岭算法时区分不同的区域。
下面对标记分水岭区域的代码进行详细解释:
# 通过 connectedComponents 函数对前景图像进行连通组件分析,得到每个连通区域的标签
ret, markers = cv.connectedComponents(sure_fg)
# 将分水岭区域的标签值加1,使得背景区域标签为0,前景区域从1开始标签
markers = markers + 1
# 将未知区域的像素设置为0,即标记为背景区域
markers[unknown == 255] = 0
首先,使用 cv.connectedComponents 函数对二值化的前景图像(sure_fg)进行连通组件分析,这会给每个连通区域分配一个唯一的标签值。函数的返回值 ret 表示总共有多少个连通区域,而 markers 是一个与原始图像大小相同的数组,记录了每个像素所属的连通区域的标签值。
然后,将 markers 数组中的所有元素加1,目的是将背景区域的标签设为0,前景区域从1开始标签。
最后,将未知区域(unknown==255)对应的像素标记为0,即将它们标记为背景区域。
通过这一步骤,我们将得到一个用于应用分水岭算法的标记图像。其中,背景区域的标签为0,前景区域从1开始编号,未知区域标记为0。这样,在应用分水岭算法时,算法就能根据这些标记来划分不同的区域。














 1091
1091











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









