






迷宫的基础知识
首先我们需要同步一个观点,即“迷宫是什么?”。在我们的初步认知里,是
定义:能在整个错综复杂的道路中能有一条从起点走向终点的道路
但在此基础上,我们需要强加两个隐藏条件以保证其展示的效果是最佳的,局面是最复杂的,并且每一个迷宫里的格子和墙都是有意义的。
1.每个格子都能被走到
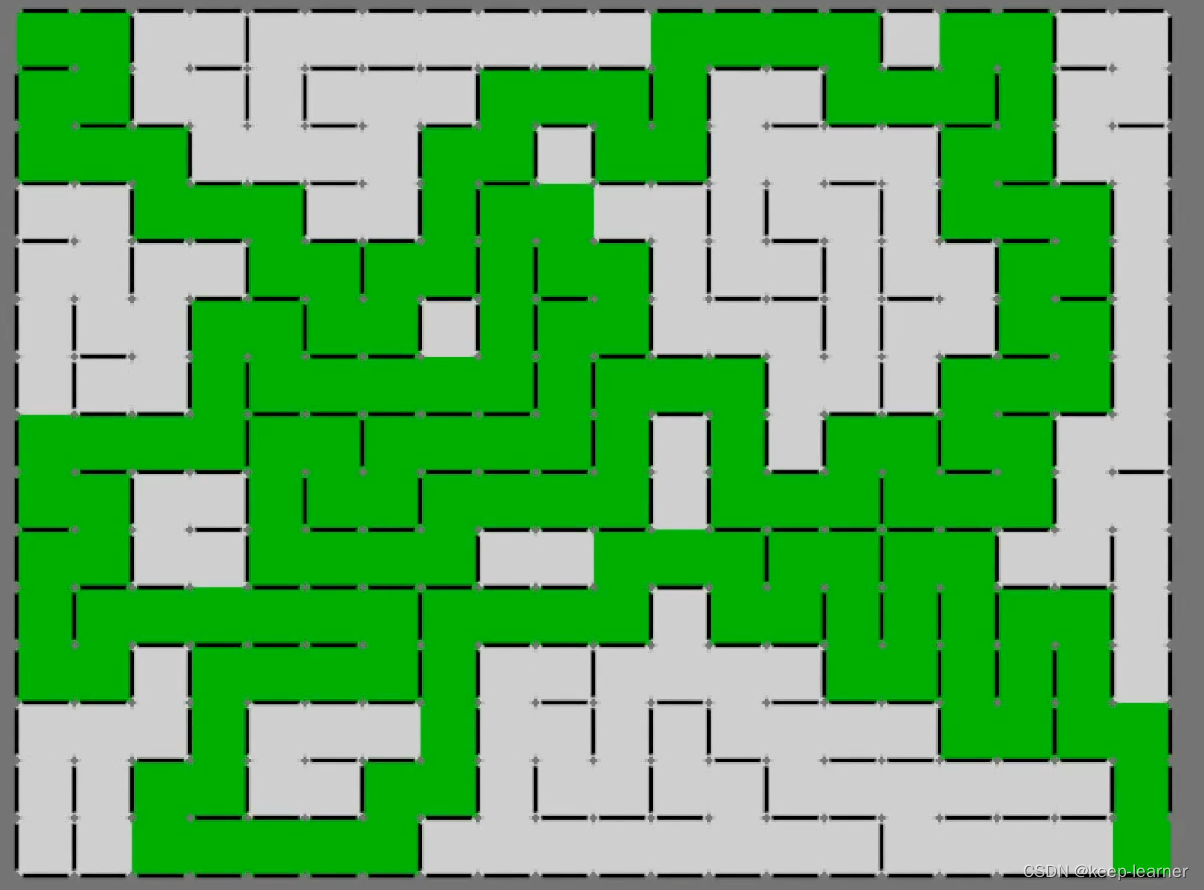
当我们去仔细观察每一张迷宫图其实都能发现,每一个格子都有可能被玩家从起点开始走到,即是有意义的(参考下方两张网图)。
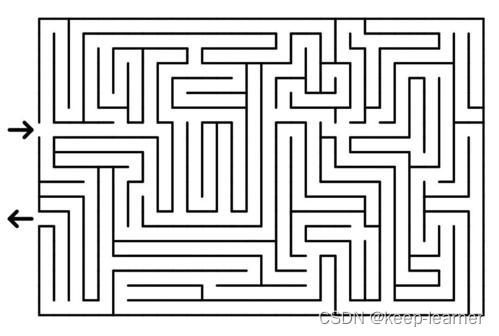
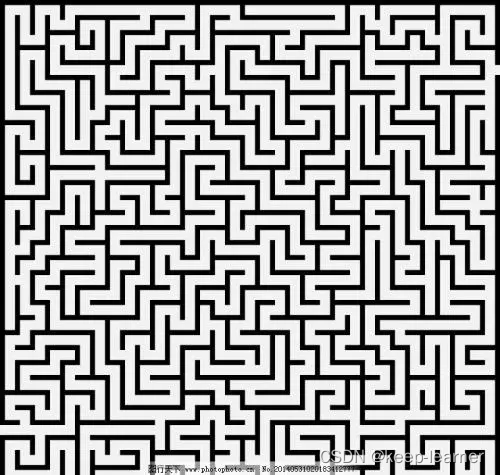
刚开始难以理解,如果偏要设计出一个迷宫,里面有些格子就是专门用来迷惑玩家的,这样难道不行吗?不过思考后会发现其实并没有这种必要。
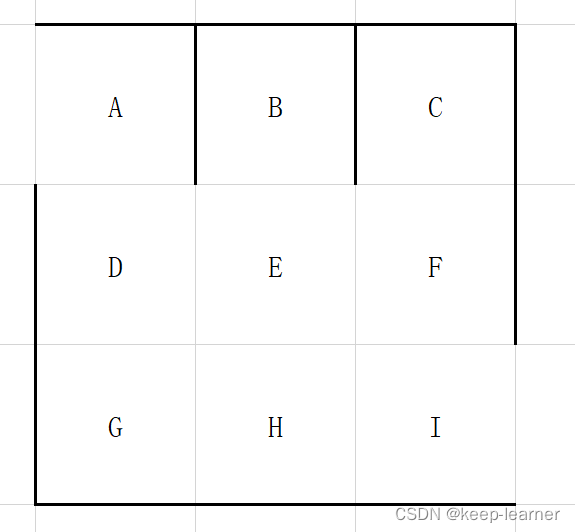
参考下方的截图(至此之后迷宫的表现形式也多是这种excel表格里的简易版本迷宫)
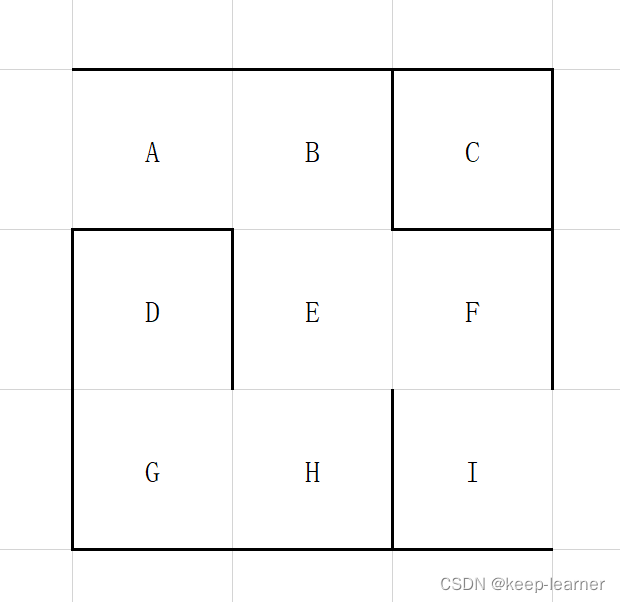
C是完全不会被走到的区域。可以很快地发现,计算机在玩这种迷宫游戏的时候,完全可以等效于另一种迷宫形式,即不存在C点:
而玩家大多数倾向于一种“深度优先解法”,即一条路走死胡同之后折返回来走另一条路。既然C区域就像是世外桃源一般完全没有办法被访问到,自然也就不会增加折返的任何代价。迷宫的设计思路当然是在有解的前提下越复杂越好,尽量避免冗余信息的存在是迷宫设计的前提之一。
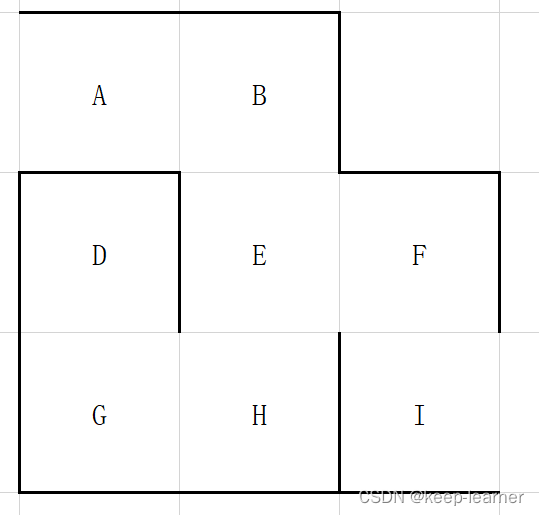
我们为什么不直接把死路的一面墙打通,让走不到的路成为能走到的路,让迷宫变得更有趣呢?
2.除了必要的通路外,没有去除其他的墙
在玩家能解开迷宫的前提下做的尽量复杂,保留足够多的墙也是考虑到的范围之一。
如上面的迷宫,本质意义上来讲在降低复杂度和难度,迷宫的可玩性变得降低。
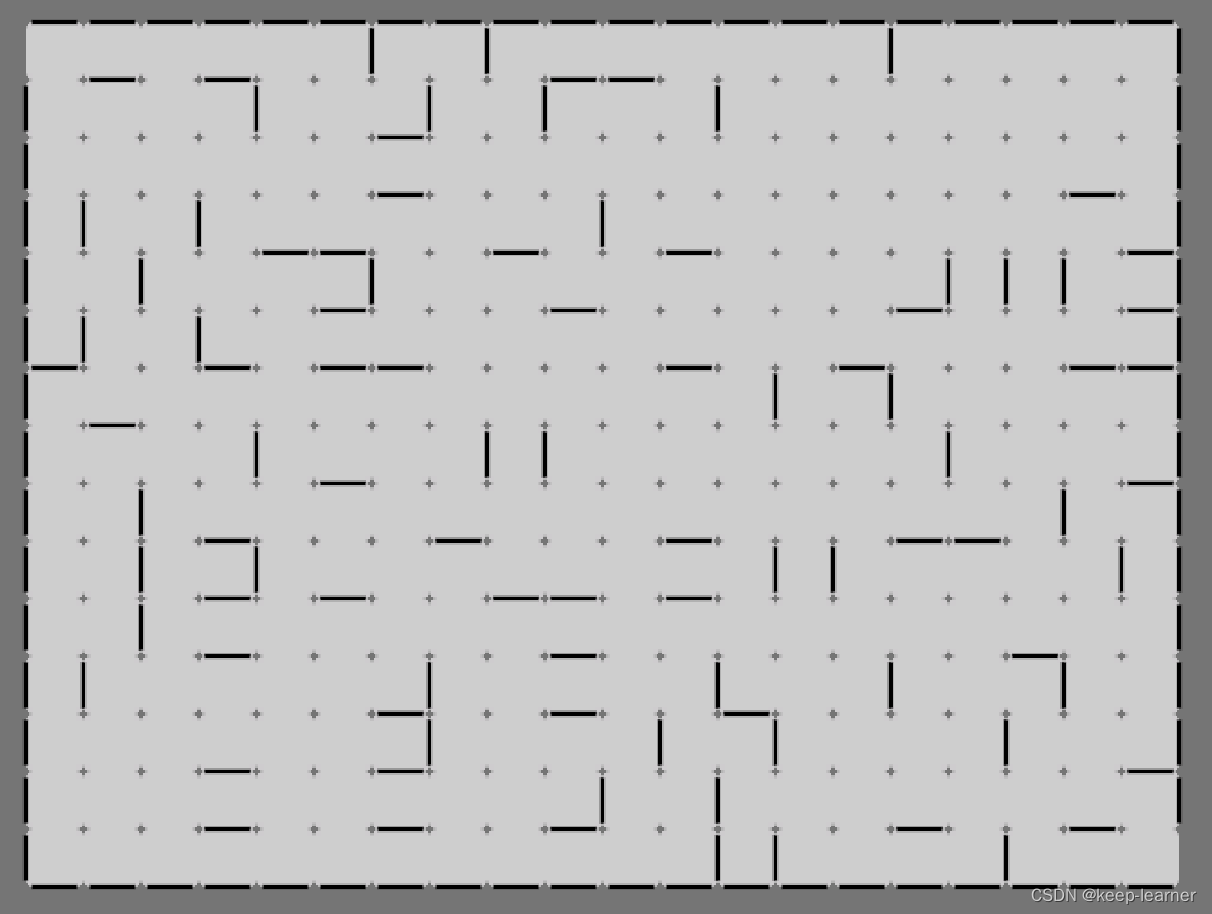
若迷宫再设计得庞大一些,那么效果更为显著,玩家在面对没有太大挑战性的游戏的时候不会有太大的乐趣(如上图,通路很多,几乎一眼看穿答案,游戏设计简单不复杂),这在游戏设计上是我们不想看到的。
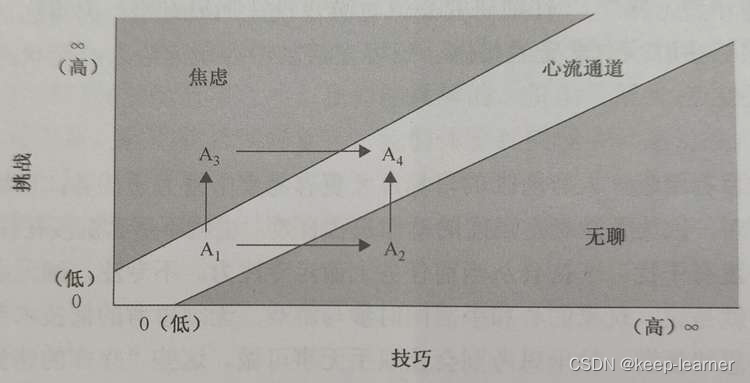
题外话:《游戏设计艺术》一书中p142开始有提到“心流”的概念,玩家在这个状态下显得完全专注于一个活动中,并感到高度的乐趣和满足感。其中很详细地介绍了如果游戏难度一直偏低所带来的影响,其实就是直接处于A1->A2的状态并维持在A2,而因为迷宫算法设计的统一性,很难恢复到A4中。这造成的影响就是玩家难以有心流状态,换句话就是并没有实际地享受这个游戏。
生成算法
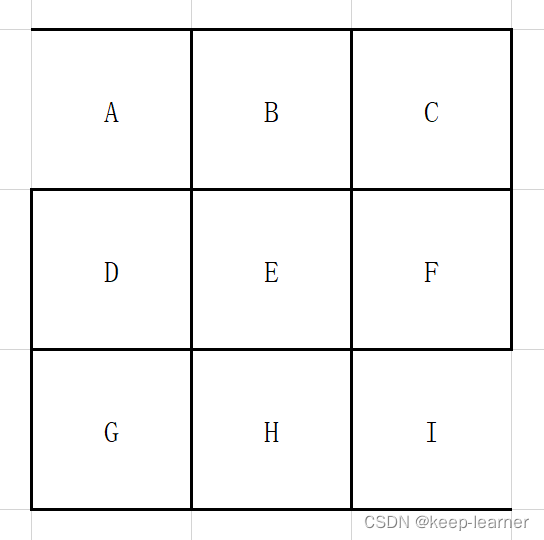
在有了以上的两个条件之后,就有了大致的生成思路了。为了达成第二个目标,最简单粗暴的方式就是:无论是哪种初始地图,我们上来就直接用所有的墙堵住所有的格子(当然可以选择留一条起始路径和终末路径),如下图。
第一步都是一样的,接下来就是生成算法的分歧所在了:
那就让我们来看看具体应该如何实现算法,以及研究这些算法生成后的效果。
深度优先算法
我们在大学的时候就有学过类似“深度优先遍历”的概念:从一个节点A开始,不断寻找迭代下一个节点An并以这个节点An开始继续寻找,直到An无法继续,则回退到An-1寻找其他节点Bn。
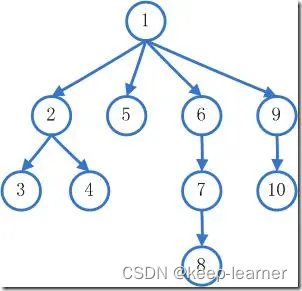
如这张图的深度优先应当是:1-2-3-4-5-6-7-8-9-10.
那么用到迷宫里该如何使用呢?
-
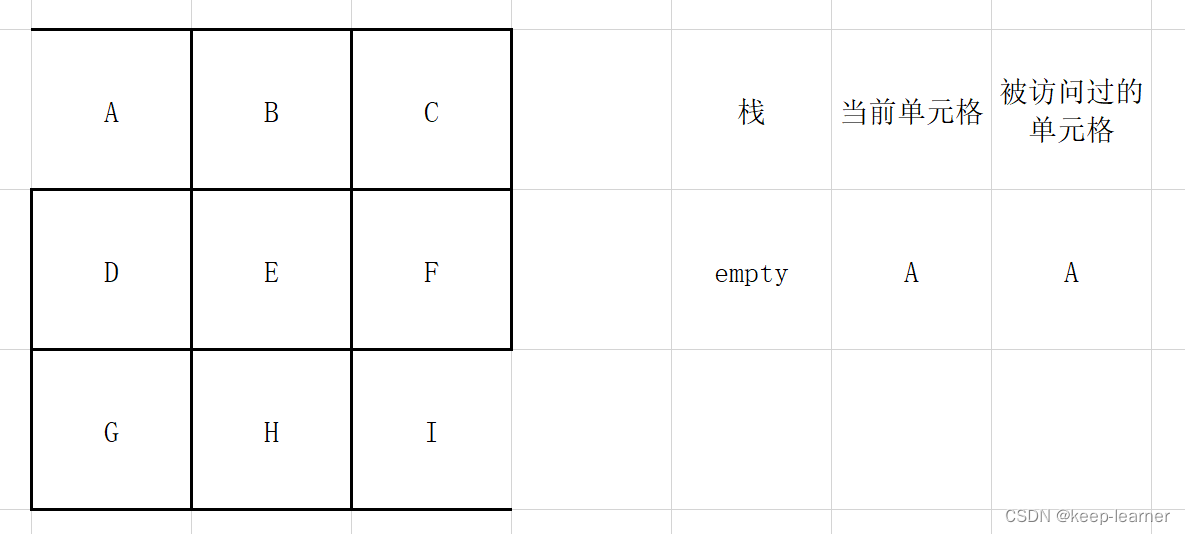
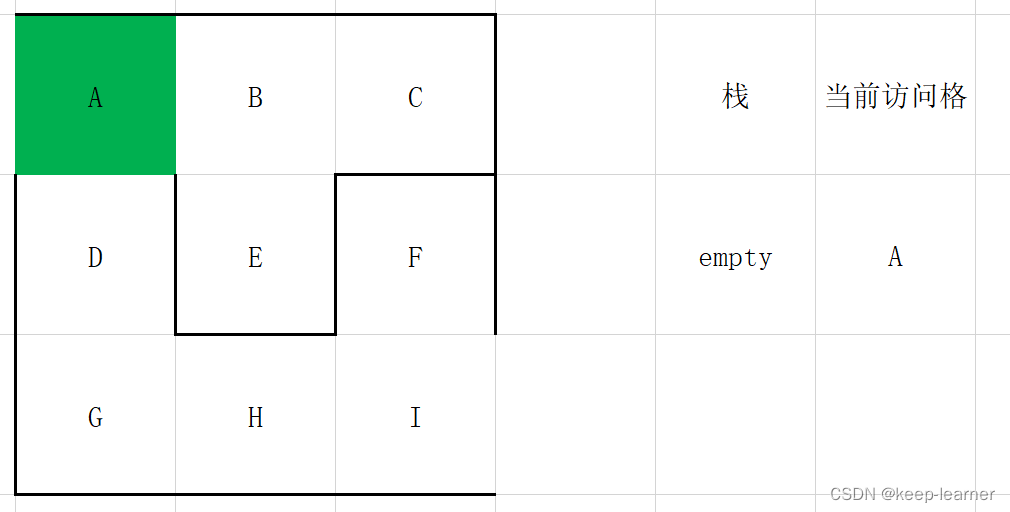
选择一个单元格作为当前访问格,并建立一个空栈。
-
通过当前访问格检查周围是否还有未被访问的单元格。
-
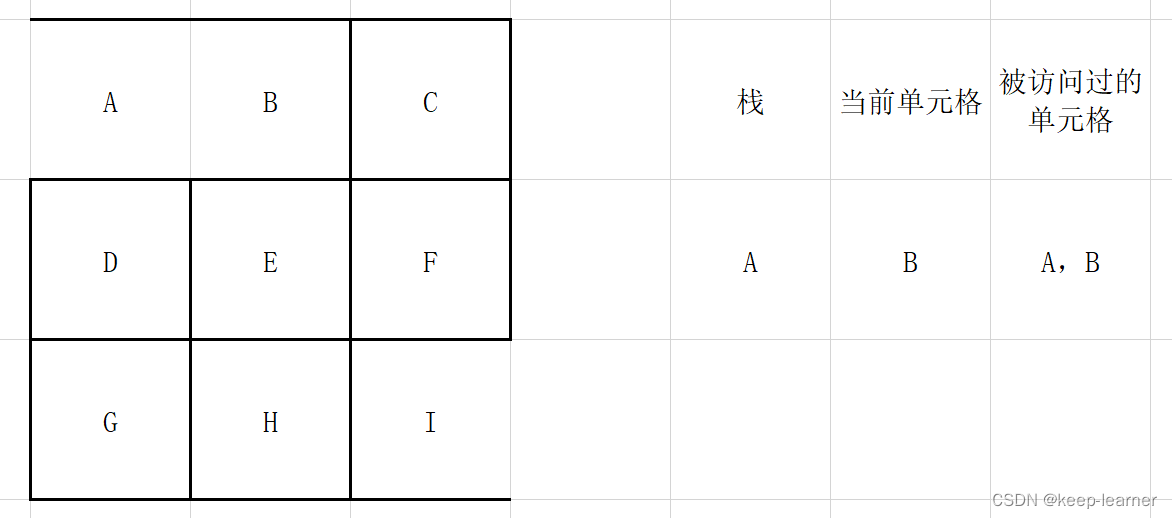
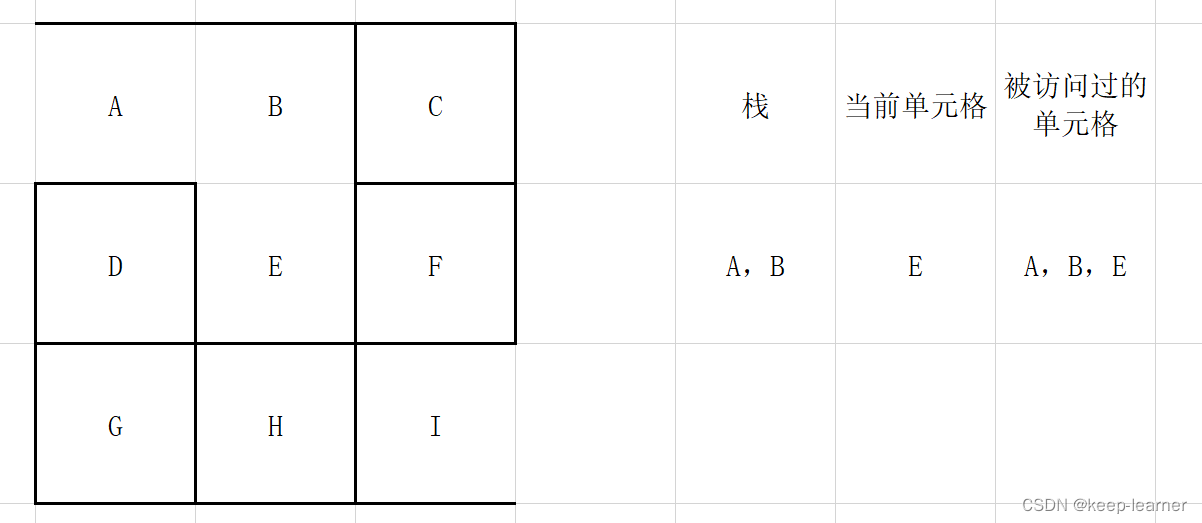
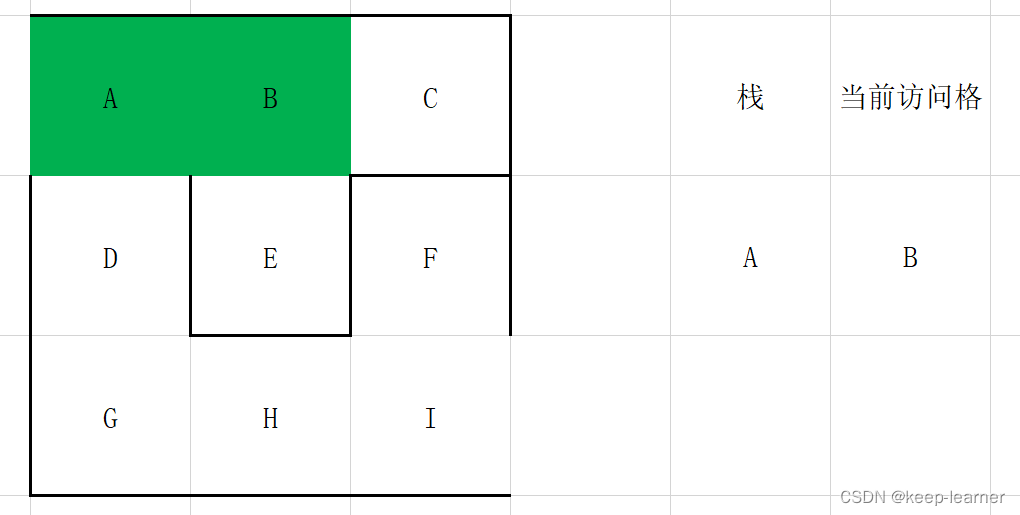
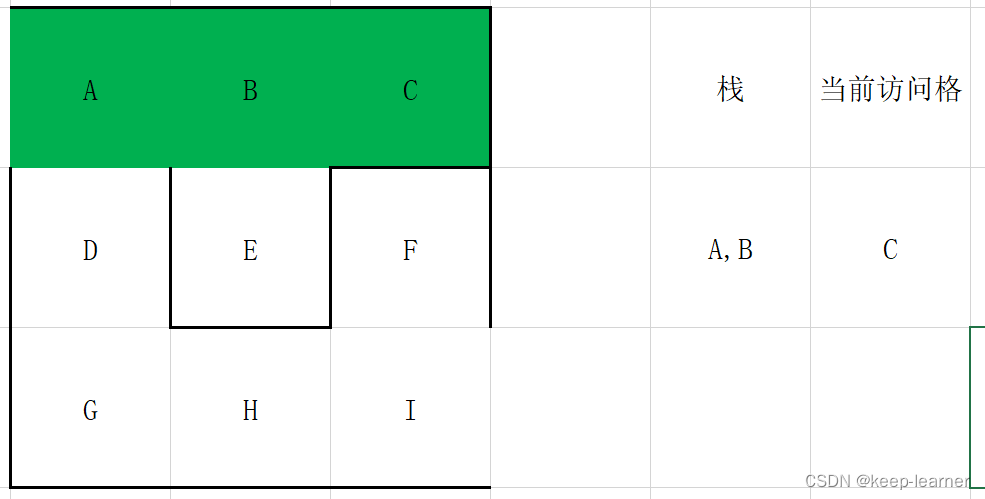
如果有,则将当前访问格放入栈中,在周围未被访问的单元格中随机选择一个作为当前访问单元格,打通刚刚的访问格和这时候的访问格之间的墙。
-
如果没有,则在栈顶取一个单元格作为当前访问单元格。
-
-
直到所有格子都被访问过,即栈空且当前访问格周围都被访问过。
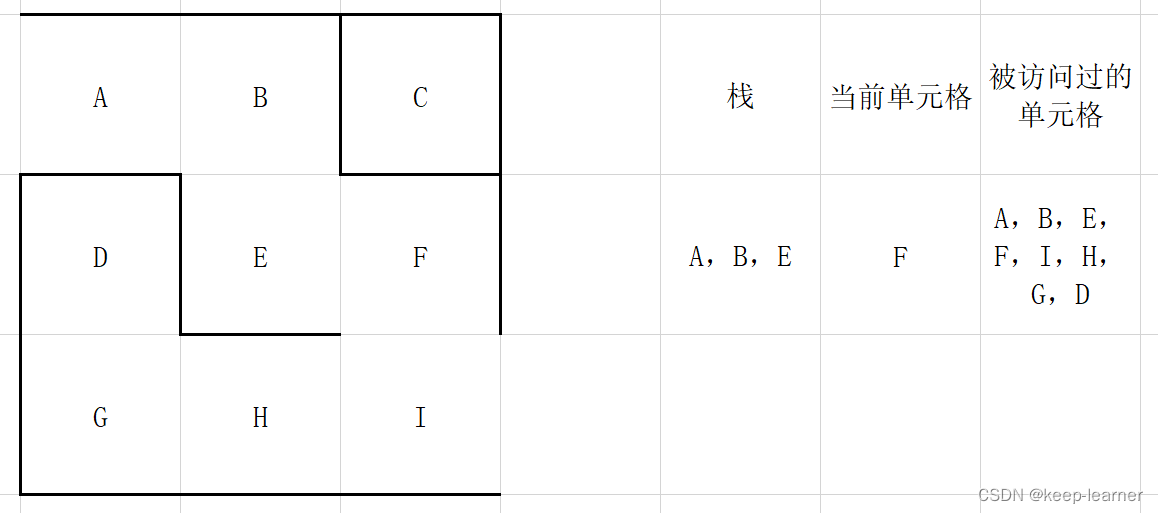
让我们直接来看简易流程:
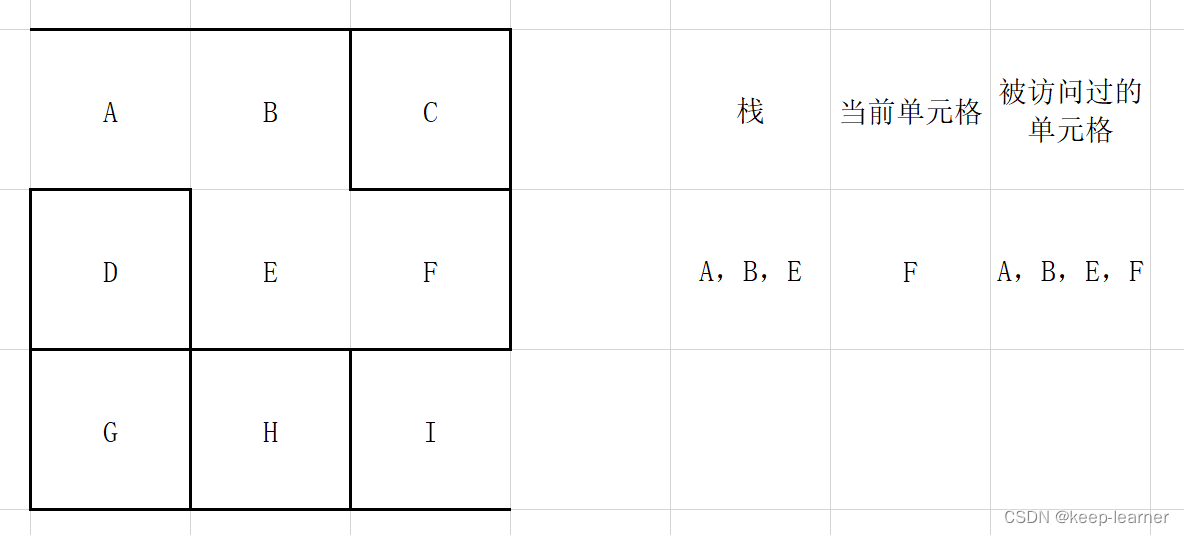
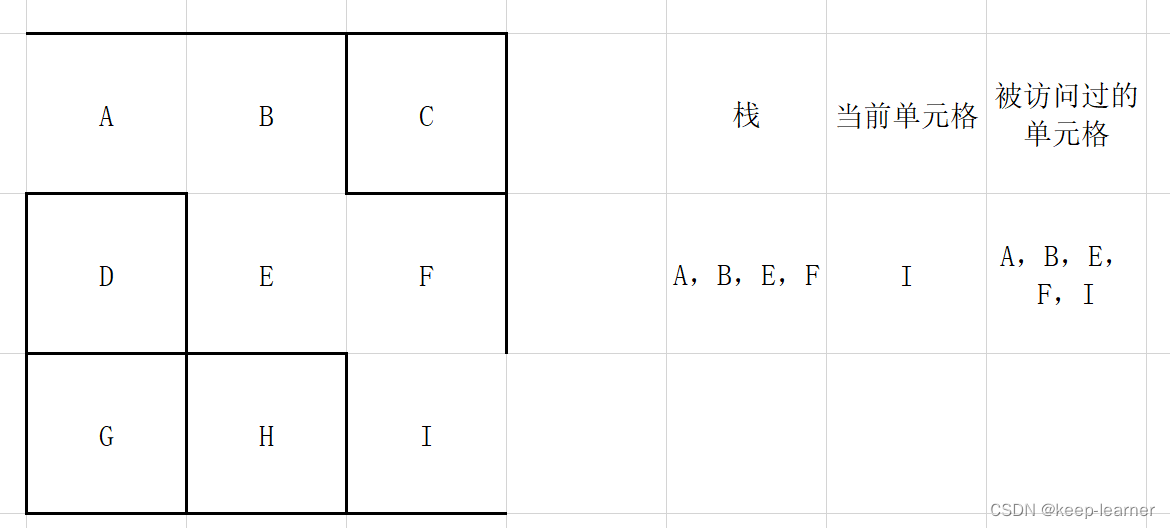
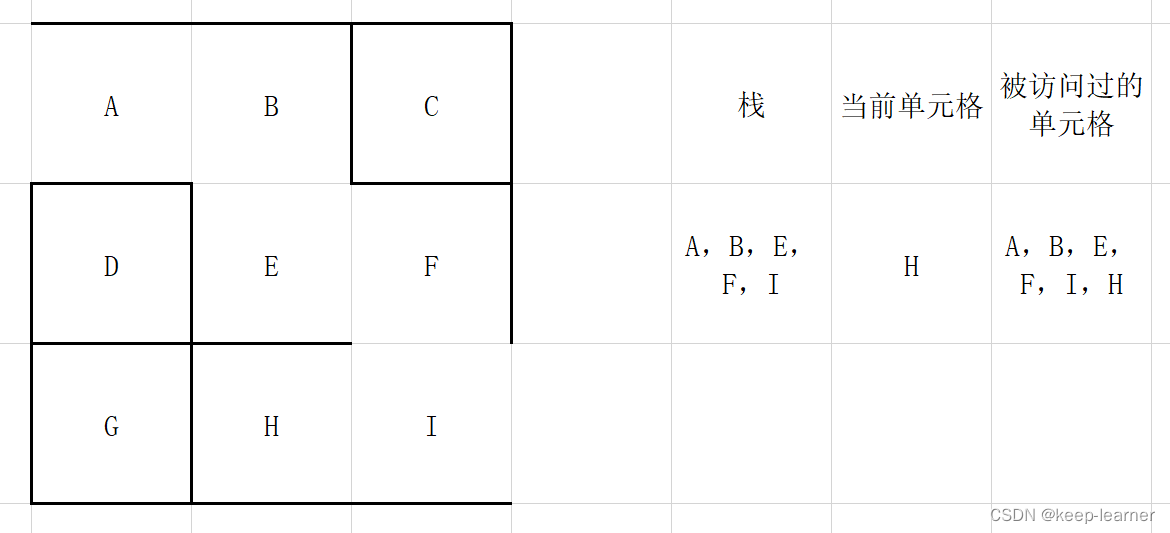
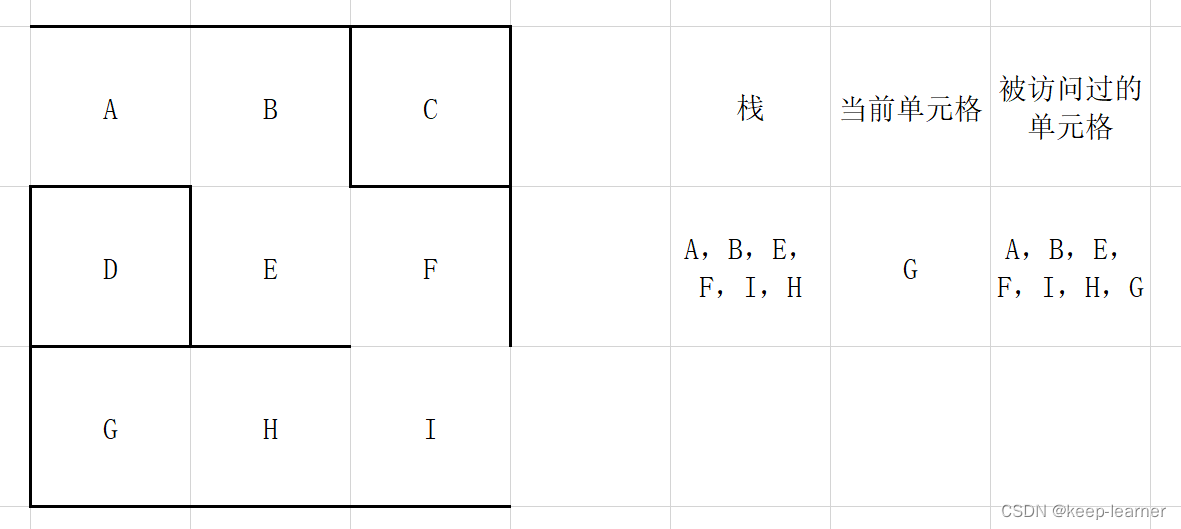
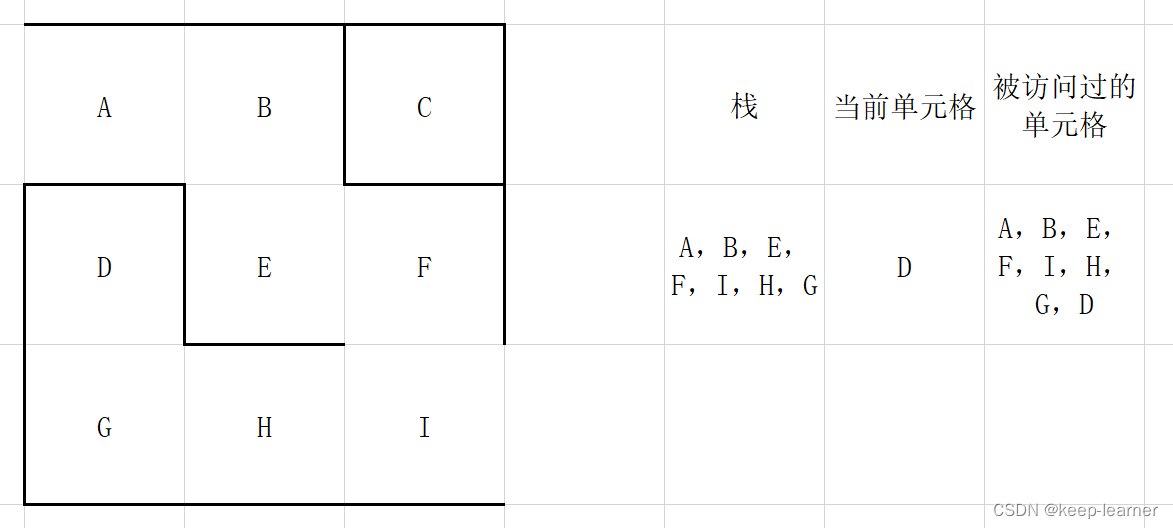
注意,这一步之后,当前单元格周围的单元格都被访问过,所以从栈顶弹出之前的那些格子G->H->I->F,直到下一个周围没有全部被访问到的单元格出现(F)。
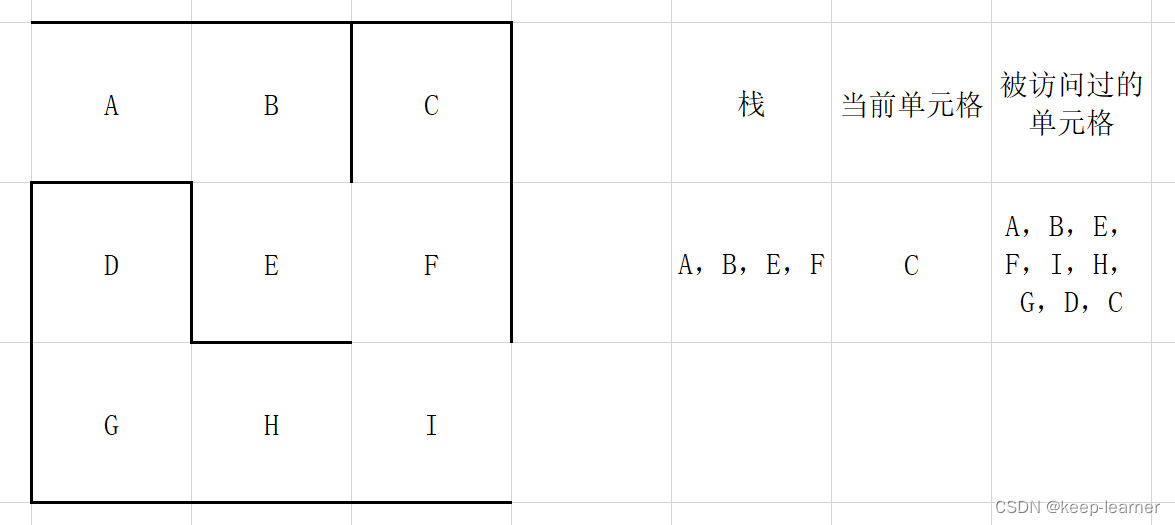
之后全部弹栈,被访问过的单元格已经是全部单元格了,所以没有必要再消除墙。至此一个迷宫就生成了。
想法:因为是深度优先,所以可以很明显地感觉到,由于后面被访问到的格子优先级最高,由它来决定新的路径该往哪走,导致了越是刚开始被访问到的点,后面返工的时候周围的路径几乎被先前访问到了,才越不可能被再次用来拓展其他路。有了优先级,这个算法才适合生成一条主干路,途中生成的其他路为辅路的地图,也就是我们常提到的“主线和支线”的概念。
prim最小生成树算法
prim生成树算法的一个简易理解就是:每次从“最周边的,将要被访问但还没被访问到”的节点中随机选择一个进行访问,同时把这个节点周围还没被定义成“最周边的,将要被访问但还没被访问到”的节点定义成此,直到所有节点都已被访问到。
在迷宫里的具体操作方式是:
-
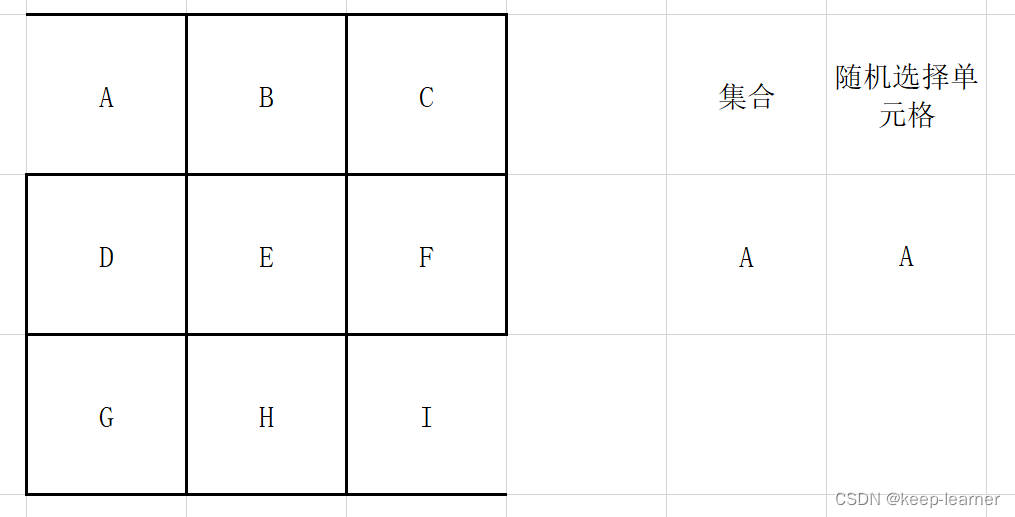
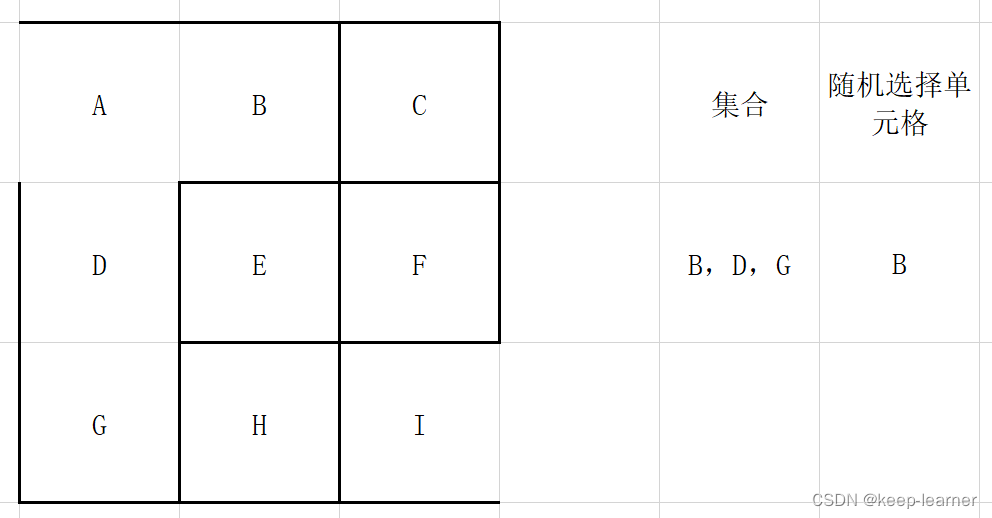
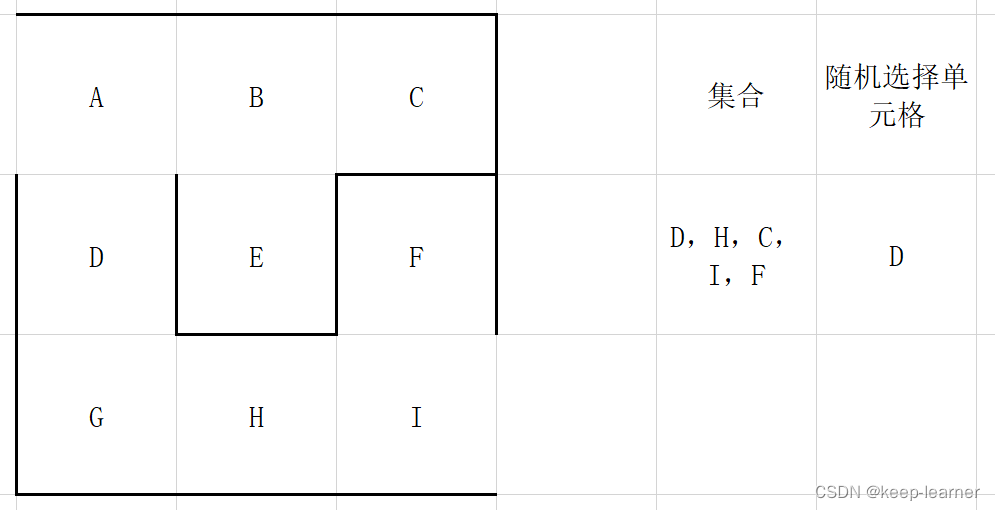
选择一个单元格作为当前访问格,并建立一个集合,作为“已访问过但周边仍然有没访问过的格子”的集合。将第一个访问格放入集合中
-
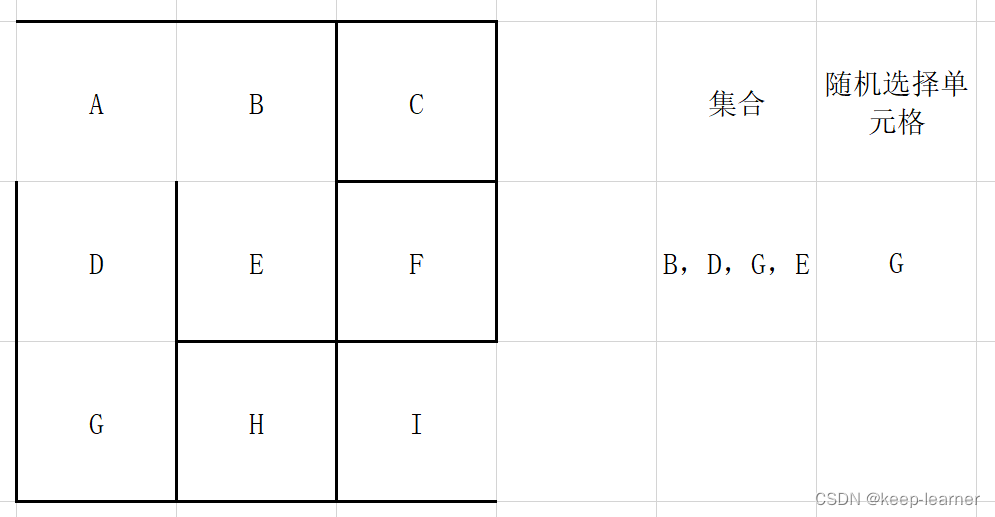
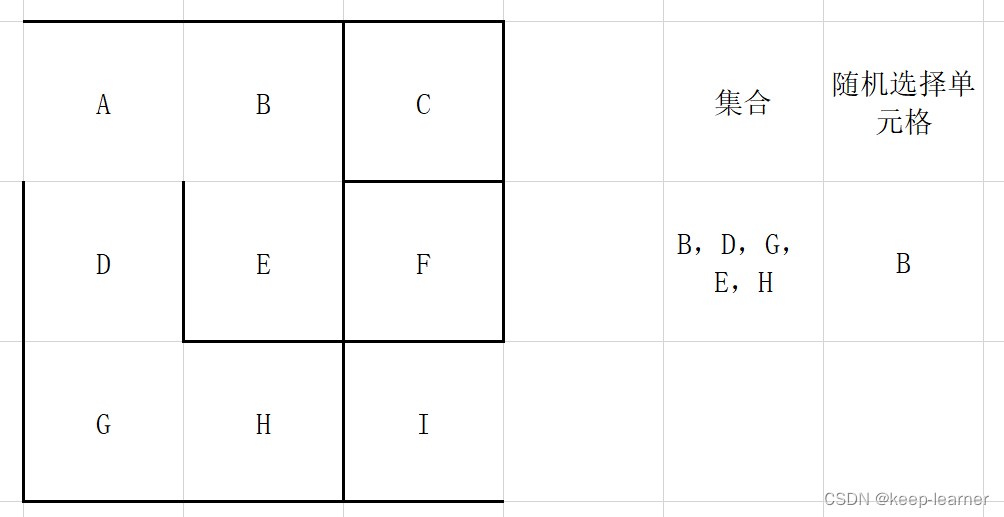
从集合中随机选择一个访问格,检查它的四周是否还有未被访问过的格子。
-
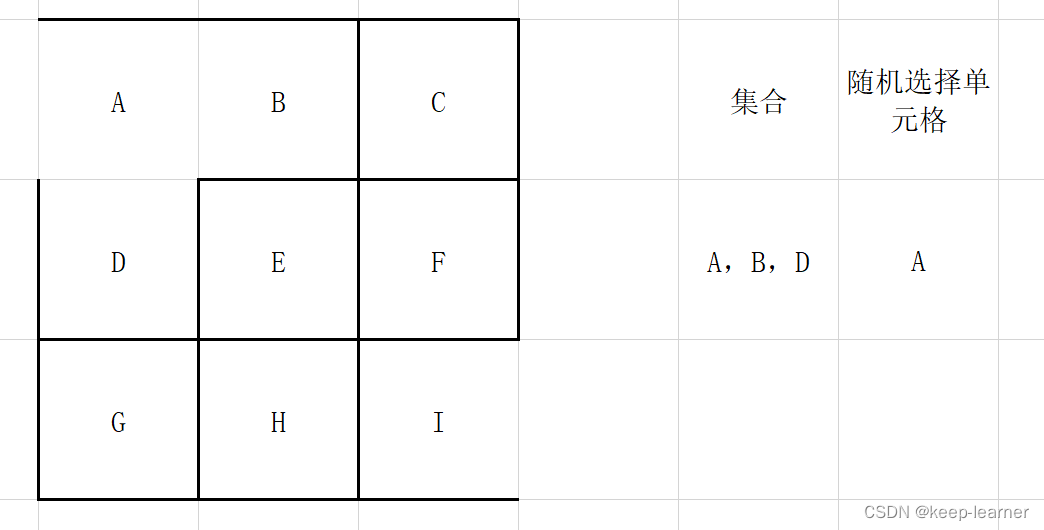
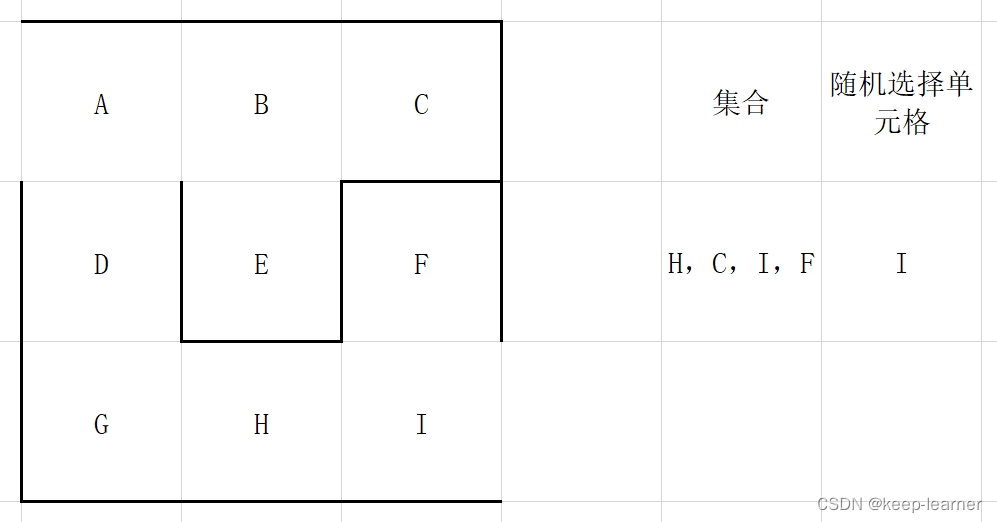
如果有,则随机选择一个它周边未被访问过的格子进行访问,打通这两个格子中的墙壁,并将这两个格子都重新放入集合中。
-
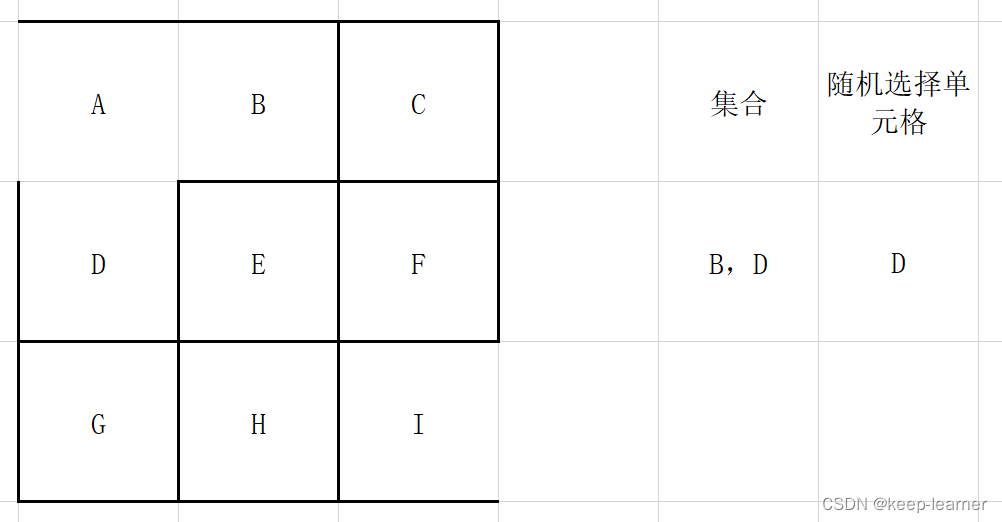
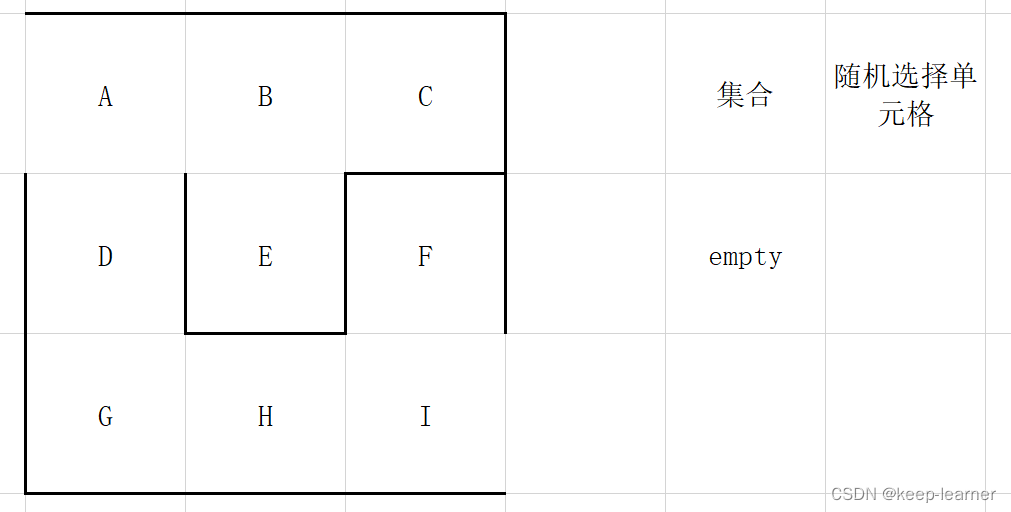
如果没有,则弃用此访问格,不放回集合中。
-
-
直到所有格子都被访问过,即集合为空。
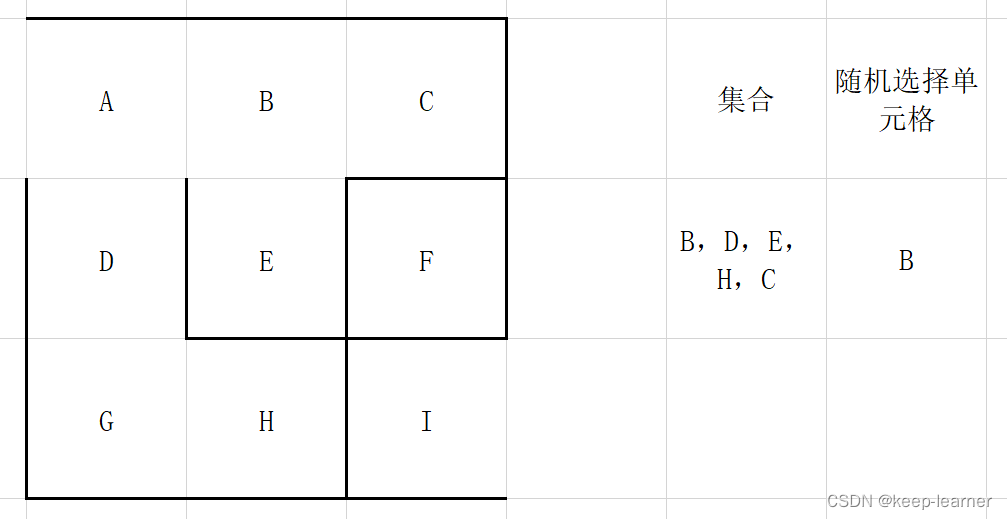
这么说有点过于概括,很难解释清楚,所以直接走流程。
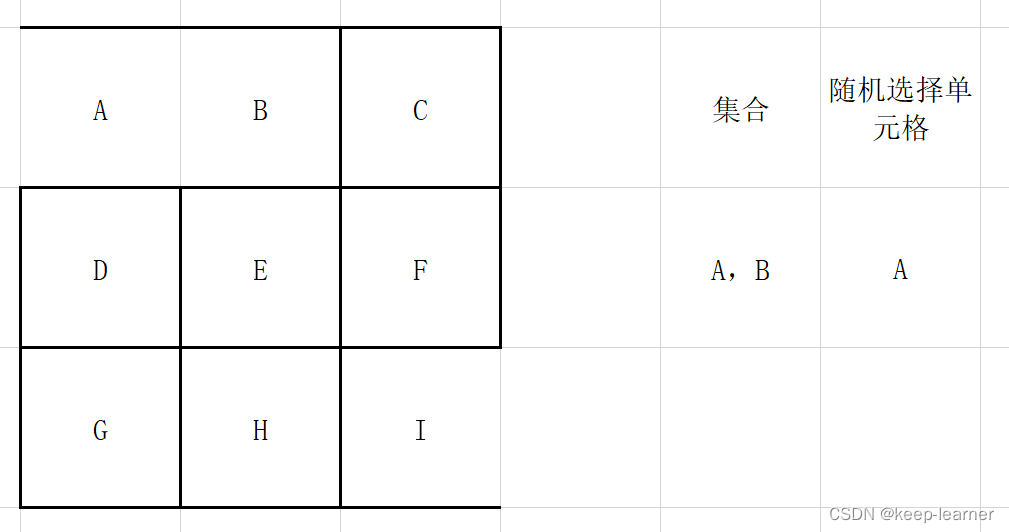
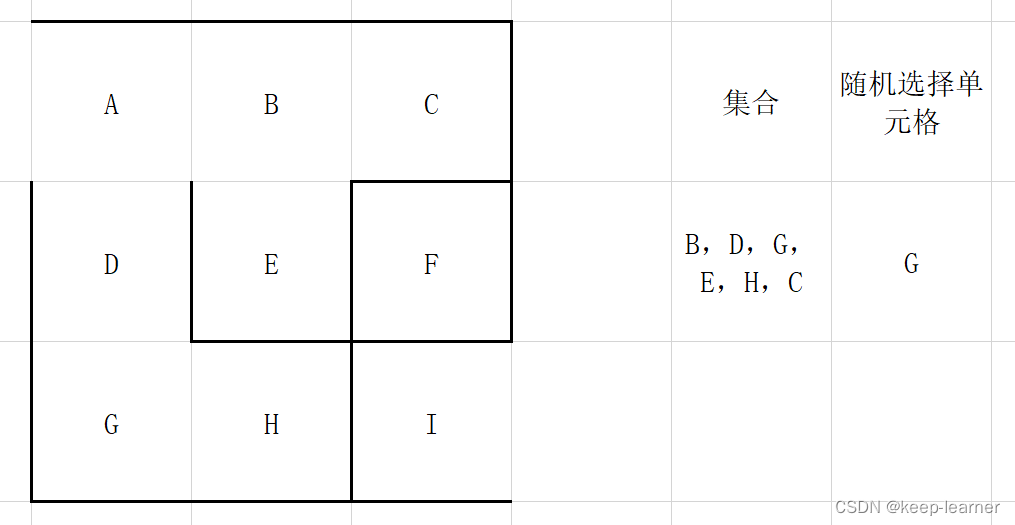
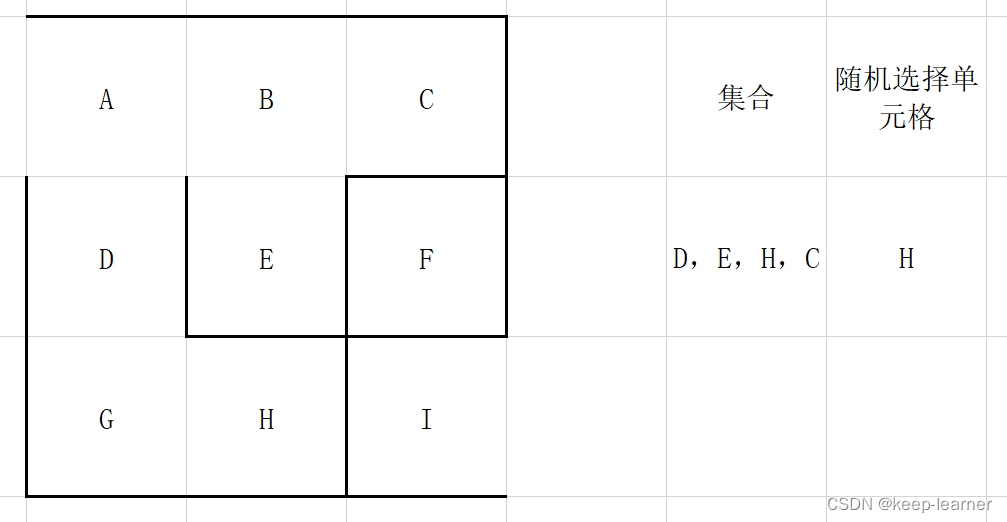
每次都从集合中随机选择一个单元格来检查四周,比如上图这里再选择A的时候就只剩下D作为唯一的选择来打通了。
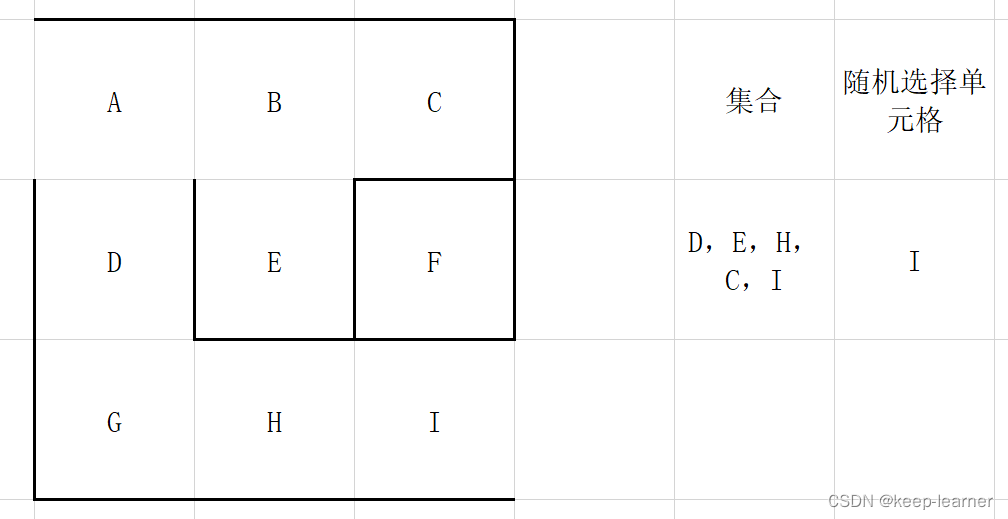
上图这次仍然选择A的话,已经发现四周没有其他没被访问过的单元格了,所以从集合中删除,并且重新随机选择。
可以看到上图,又随机选到周围都被访问过的单元格了,还是和A一样,直接从集合中去掉,重新随机选择。
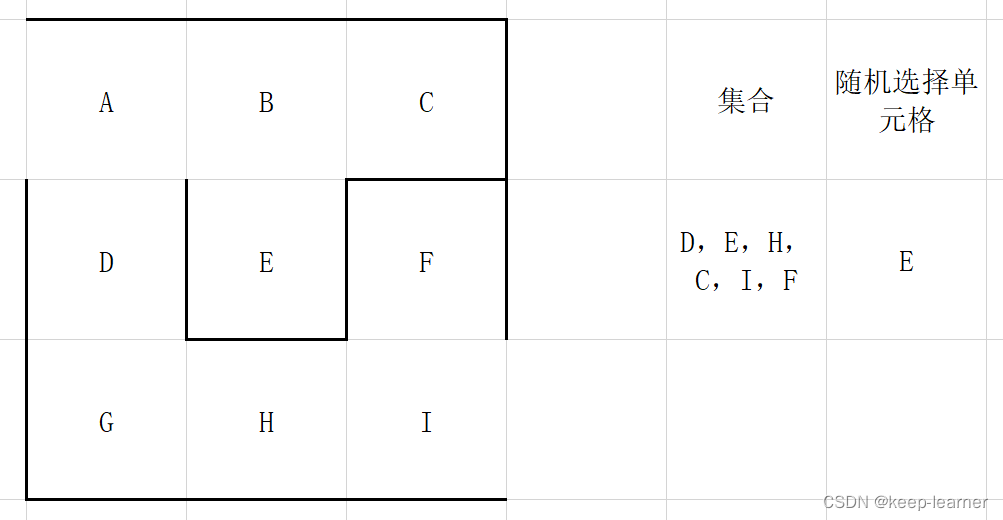
可以看到所有的单元格都访问过了,那接下来的循环就都是逐个删除集合中的元素。
......
效果:
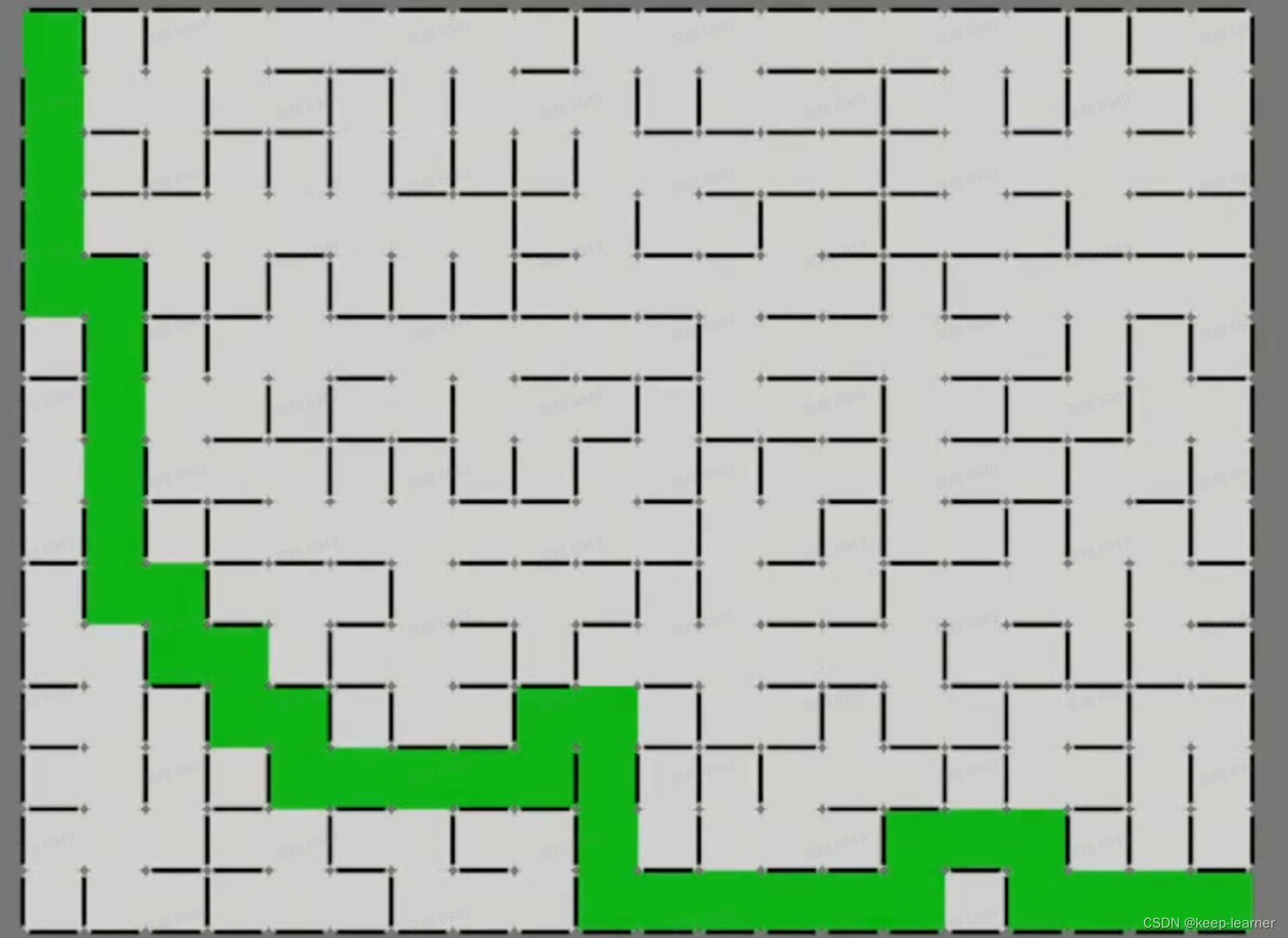
想法:因为它无论是在找已访问过的节点,还是在打通墙壁前找没访问过的节点,都是公平随机的,所以相对于其他两种算法来讲,迷宫复杂度最高,最需要玩家的策略解开。所以是目前最适合用于纯迷宫题材的游戏。
思考
有没有一种方式,让我们打破常规逻辑,在刚开始的时候不生成所有的墙,但依然符合迷宫的第二个条件呢?
新坑:递归分割算法
解密算法
以子之矛,陷子之盾。既然想到了生成,就再想想解密的事情。之前学习《算法与数据结构》的时候就有了解过树的深度优先遍历和图的最短路径,都有助于对迷宫的解密算法的理解。
深度优先算法
即使是玩家也多数会采用这样的一个策略:走一条路走到底,直到这条路是死路,则折返到第一个交界区,重新做其他选择。
具体在迷宫里这么操作:
-
选择一个单元格作为当前访问格,并建立一个栈保存路径。
-
通过当前访问格来找到附近没有被访问过的单元格。
-
如果附近有没被访问过的单元格,则将当前访问格放入栈中,在周围未被访问的单元格中随机选择一个作为当前访问单元格。
-
如果附近并未发现没被访问过的单元格,则弃用此访问格,不放回栈中。取栈顶的那个单元格作为当前访问格。
-
-
直到访问到了终点。
-
从栈顶到栈底的路程就是从终点到起点的路程。
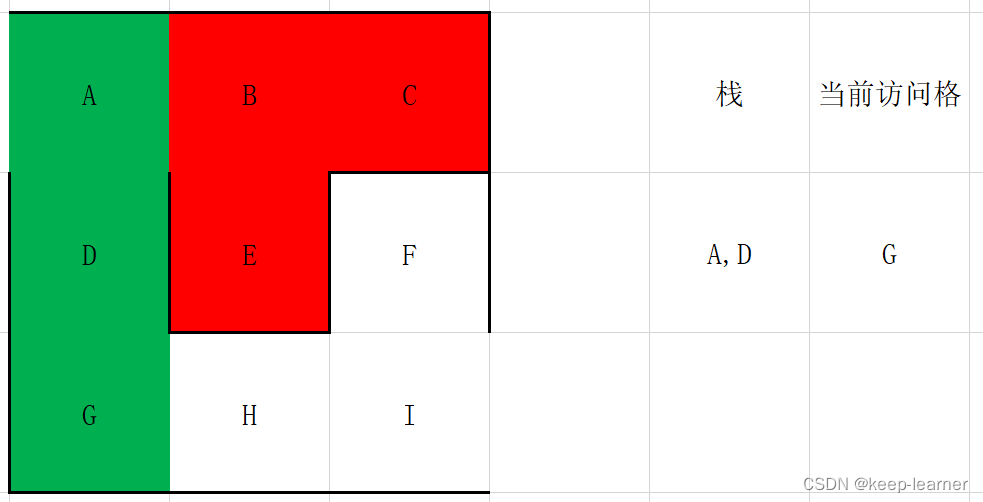
可以很清楚地看出来,解密算法中的深度优先和生成算法中的深度优先几乎一致,只不过跳出循环的条件由“栈空”变为了“访问到了终点”接下来看看图示流程。
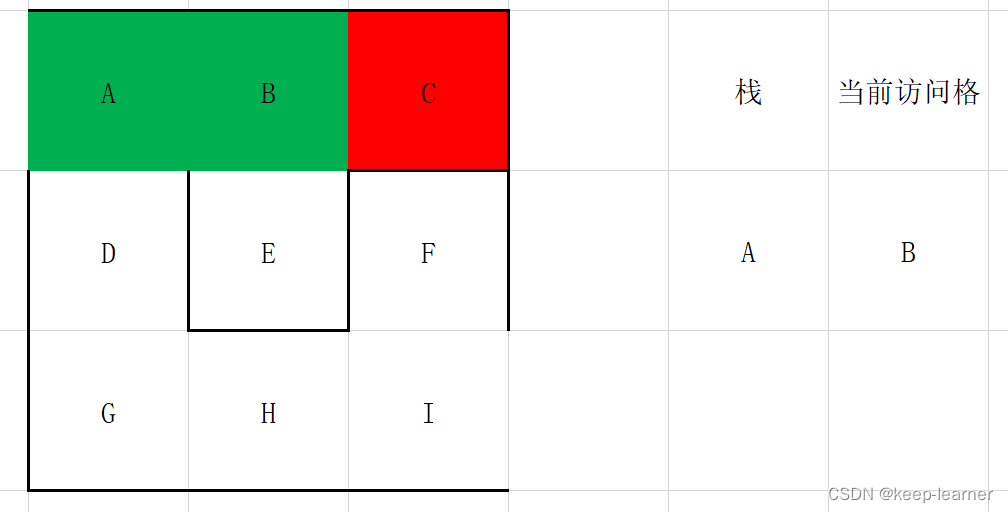
(有颜色代表访问过,绿色代表访问过且还在考察中,红色代表访问过但是是之前折返的死路)
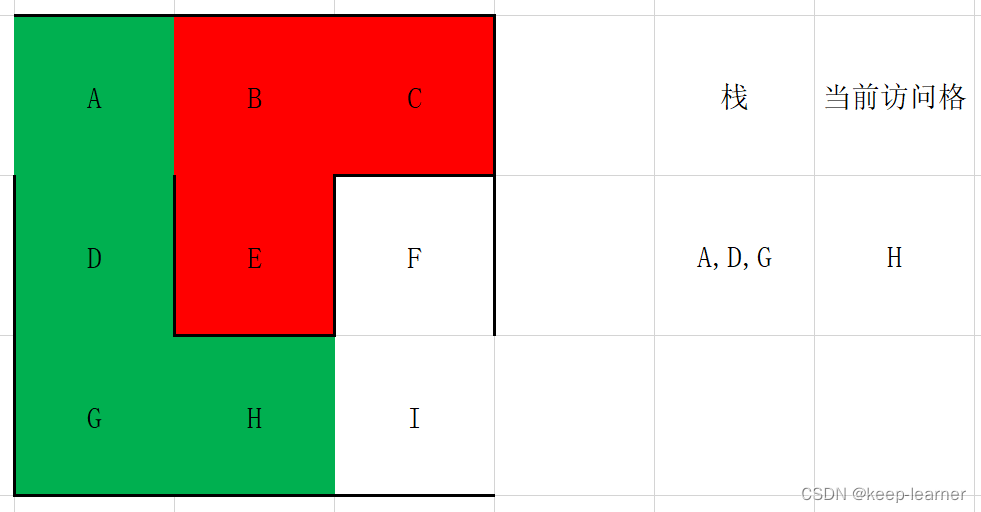
这里发现C周围没有任何通路了,则退回到B点,即弹栈。
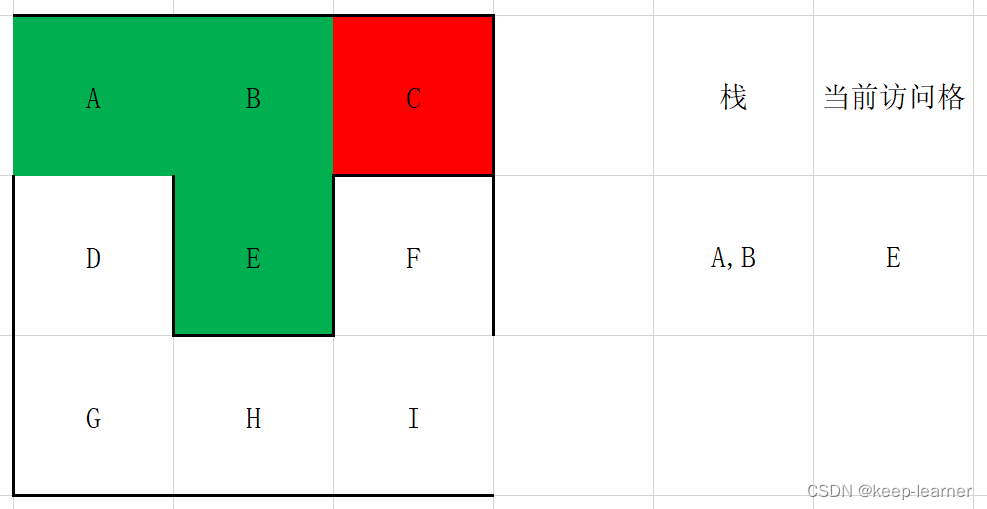
这时候退到B点,同时B再次搜寻周围,发现也都被访问过了,所以再次退回到A点。
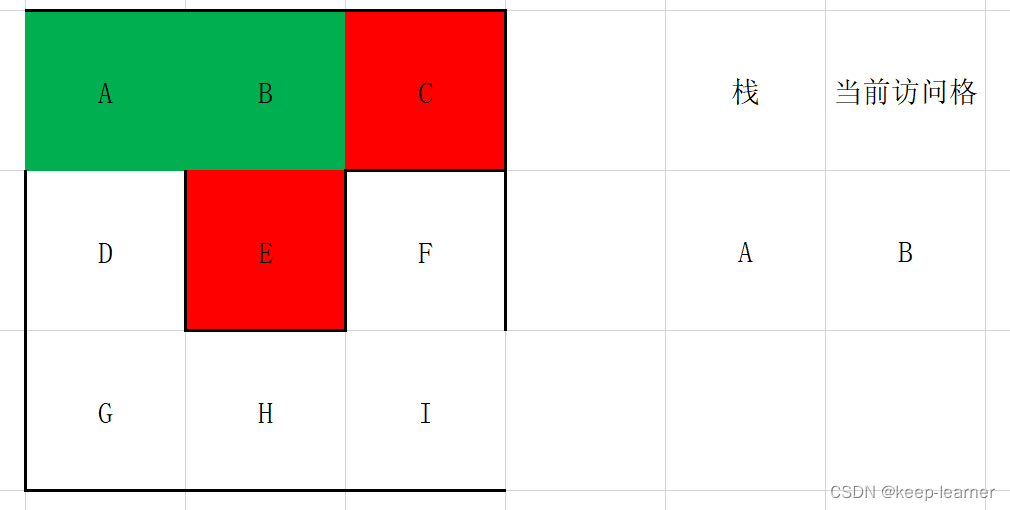
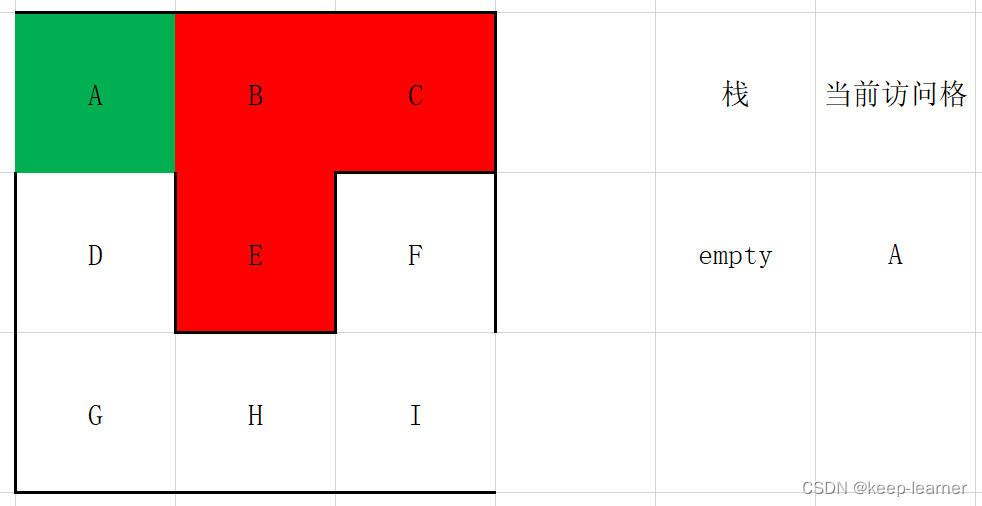
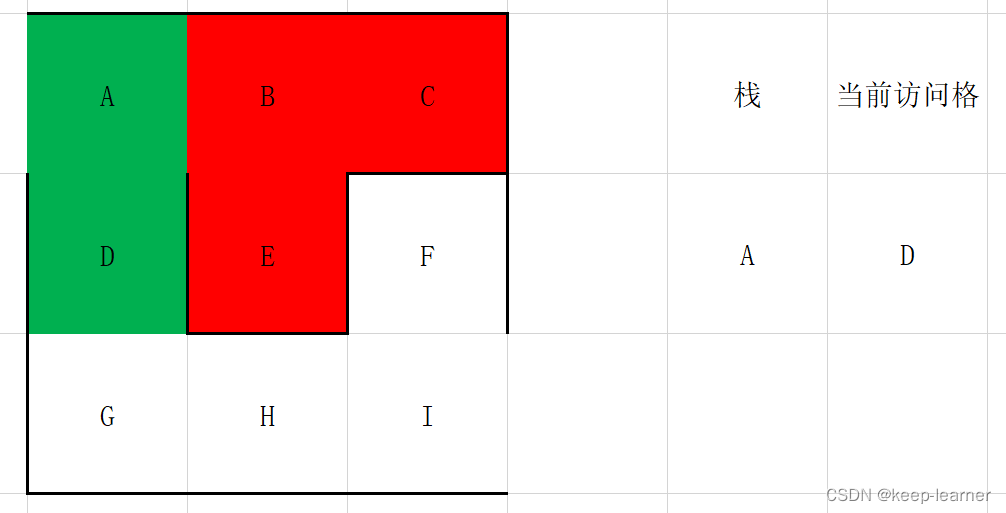
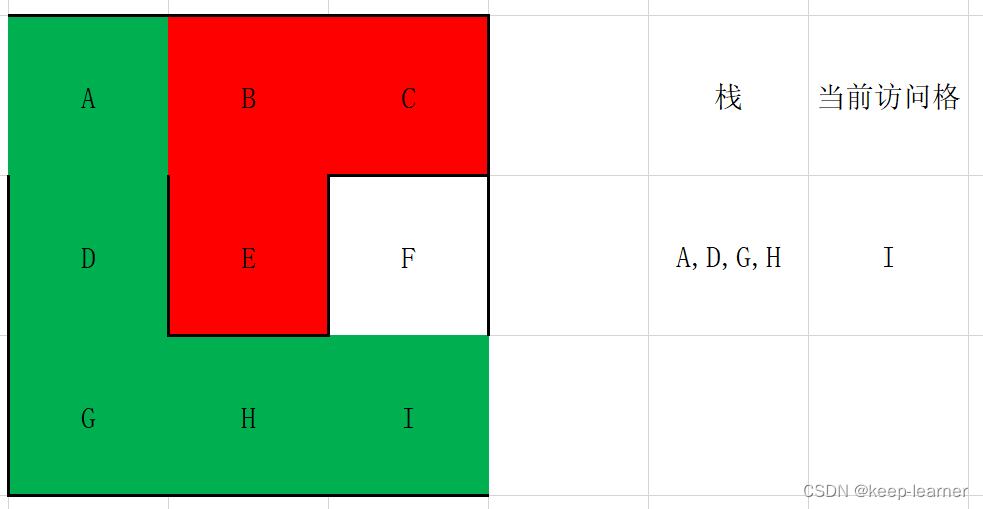
这时候访问到终点了。所以I->H->G->D->A就是从终点到起点的过程。
A*寻路算法
A*寻路算法属于启发式搜索算法,就是在状态空间中的搜索对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标。这个算法多多少少有些玄学(定理在没有读懂证明前都会觉得是玄学),我暂时没有想通证明过程,只能复现整个算法流程。
新坑:A*寻路算法的证明。
前置知识:现在每个格子都会有三个值:
-
G:从起点到这个点的最短距离。因为我们刚开始是从起点开始探寻的,所以刚开始的G值或许只是暂时的最短距离值,说不定走到后面发现还要继续更新。这个值是不固定的,动态更新的值,随时会因为找到更好的值而被替换掉。
-
H:从这个点到终点的曼哈顿距离。
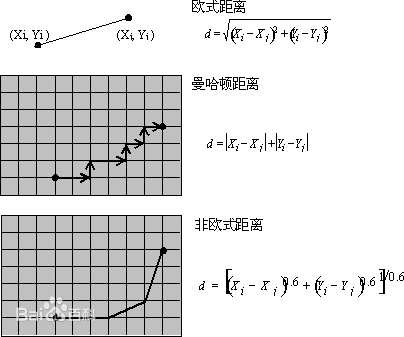
简单理解曼哈顿距离就是,在方块图中,只有起点和终点,不允许斜着走,只允许直走所需要的步数。
-
F:代价值。F=G+H。因为G是会随着步骤的进行而更新,所以F值也有可能会被更新。
好了,接下来就开始讲讲算法的具体流程:
-
创建一个用于存储周边未访问格子的集合。
-
进行循环
-
选择起点作为当前访问格(起点的G值为0,H为到终点的曼哈顿距离)。
-
搜索当前访问格周围(上下左右)的格子。做如下判断:
-
如果这个格子之前被访问过或者被墙阻隔,那么忽略它,不做考虑。
-
如果这个格子没有被访问过,且没被墙阻隔,且没有在集合中,那么就可以计算它的G值和H值。H值很好计算,终点是固定的,那么就由当前格子的坐标和终点坐标之间做曼哈顿差值即可。G值就是当前访问格子的G值加上1就行(从起点到当前访问格的距离+1=从起点到这个未被访问过的格子的距离)。
-
如果这个格子没有被访问过,且没被墙阻隔,且在集合中,那么就可以试探G值是否需要更新。也就是,之前的G值,与现在的这个当前访问格的G值+1做对比(是否是当前访问格走到这个格子的路径最短),如果是则把父节点指向这个当前访问格,不是则不用更新父节点。
-
-
更新当前访问格为集合中F值(F=G+H)最小的格子。
-
-
结束循环直到走到终点格子。
-
从终点循着父节点一直走到起点的路程就是通路。
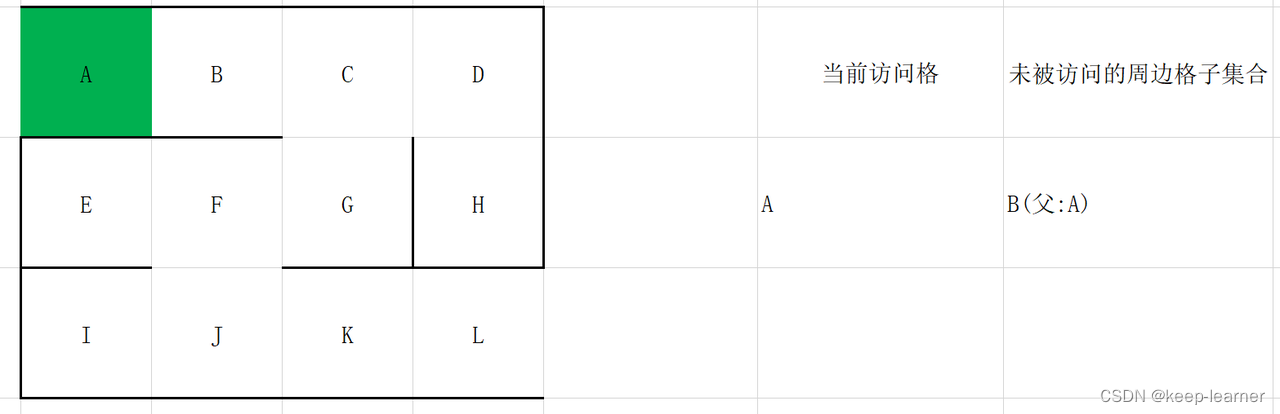
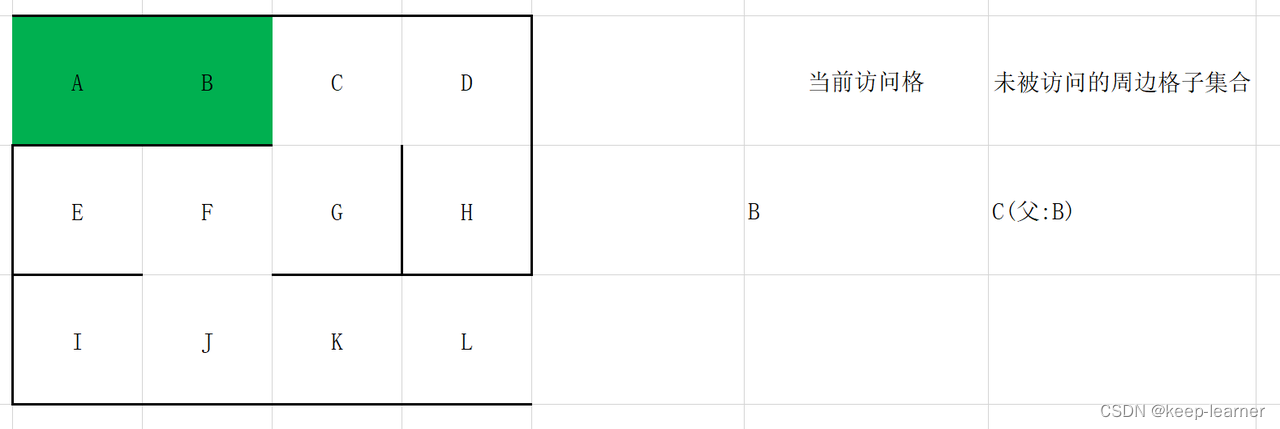
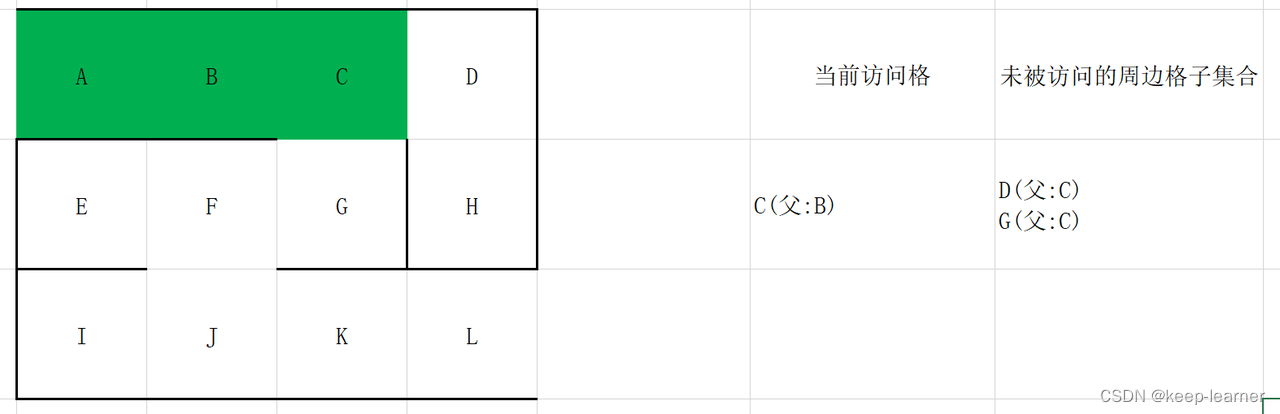
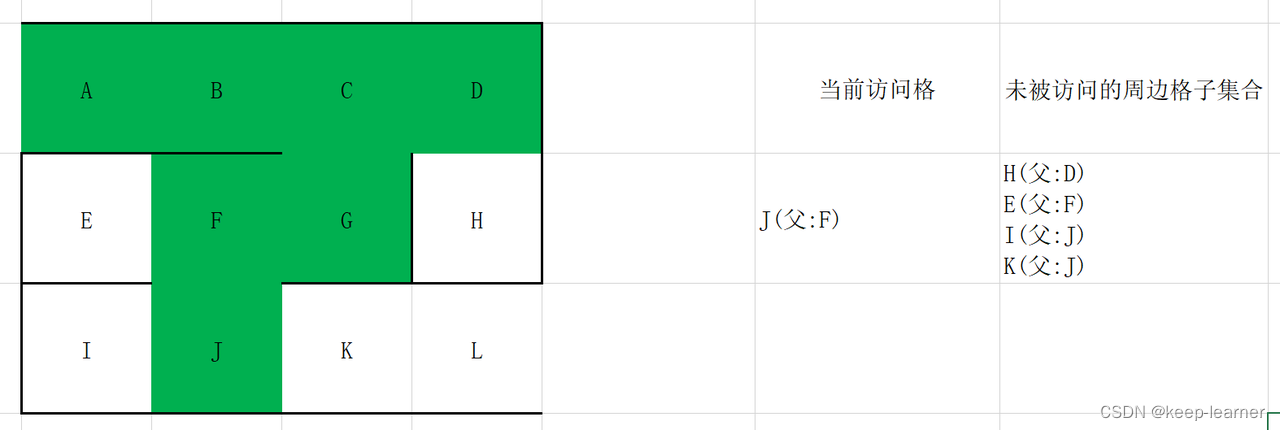
接下来我们来看图示流程:
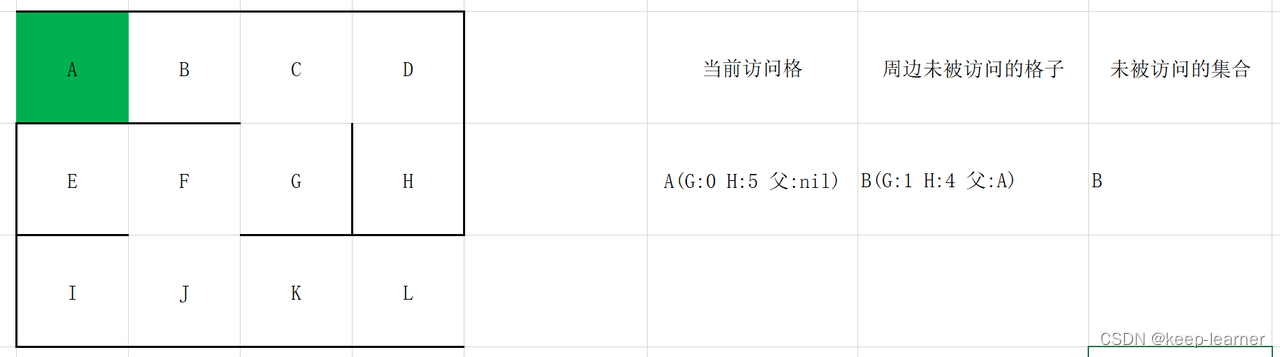
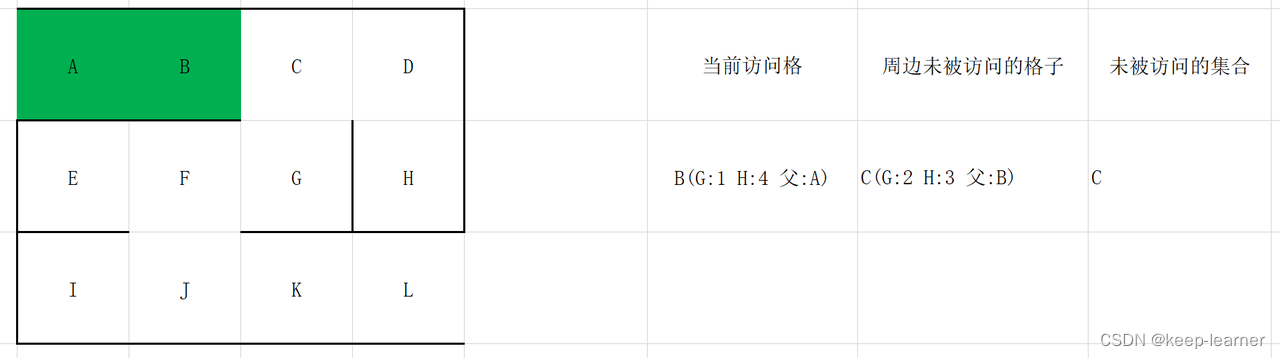
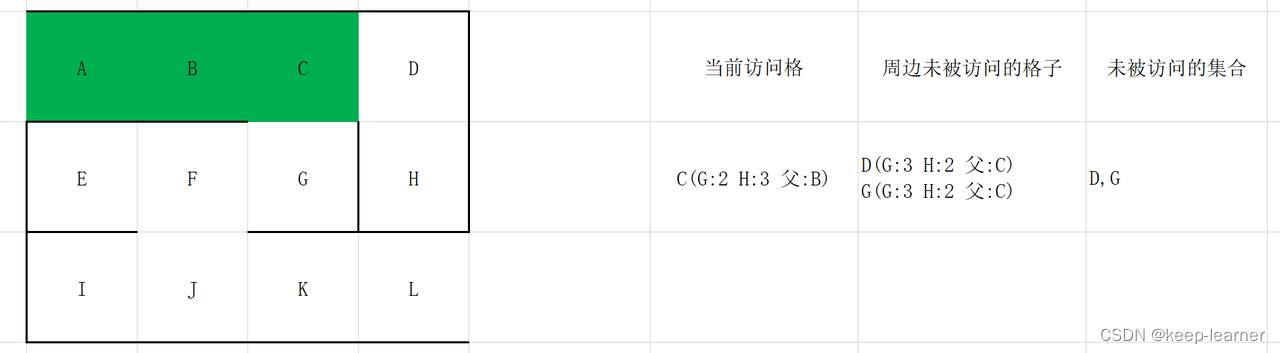
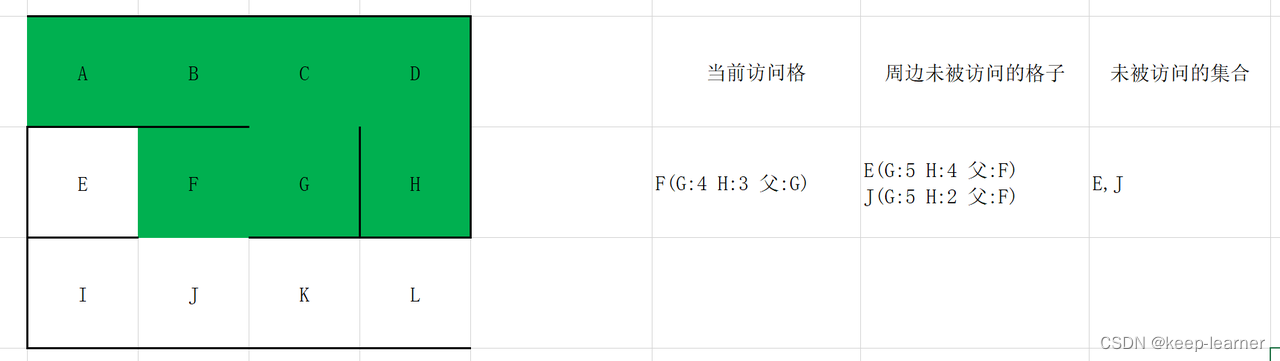
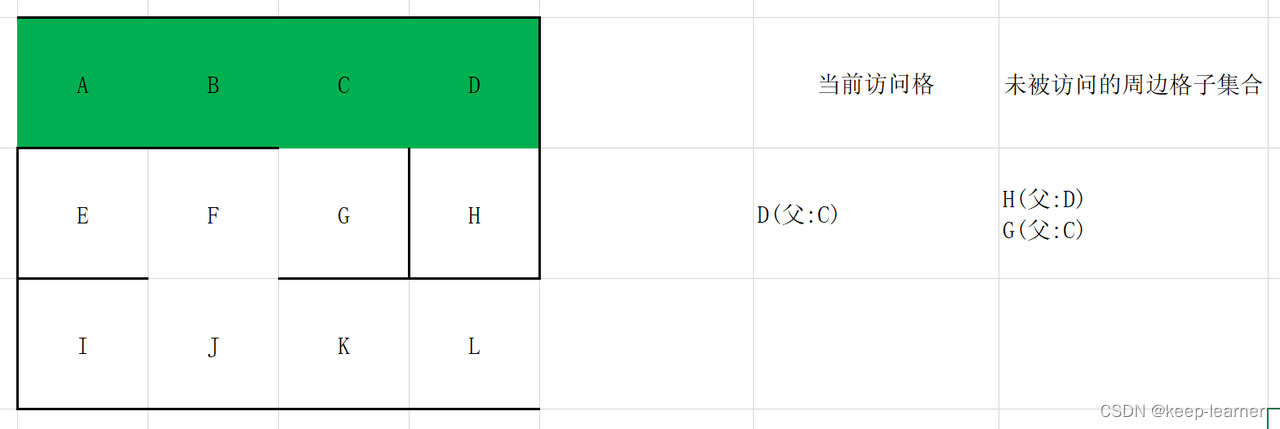
在这里D和G的F值都一样为5,我们随机选择一个作为当前访问格。
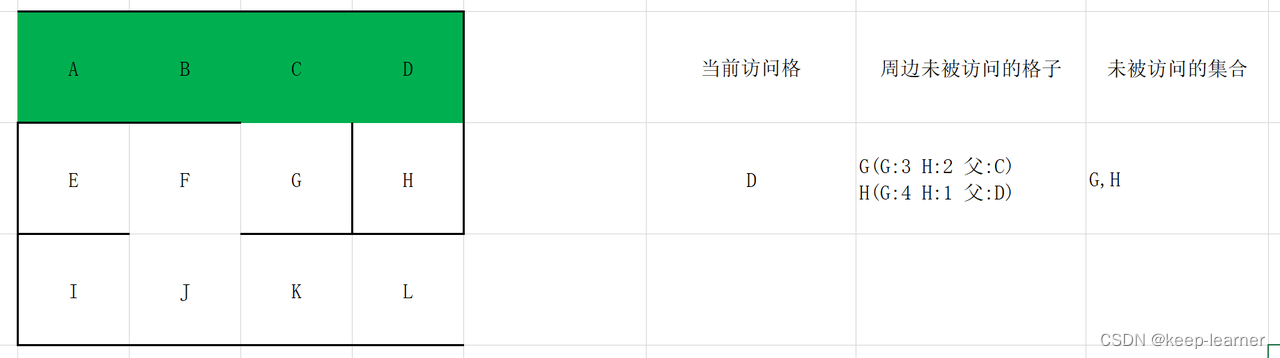
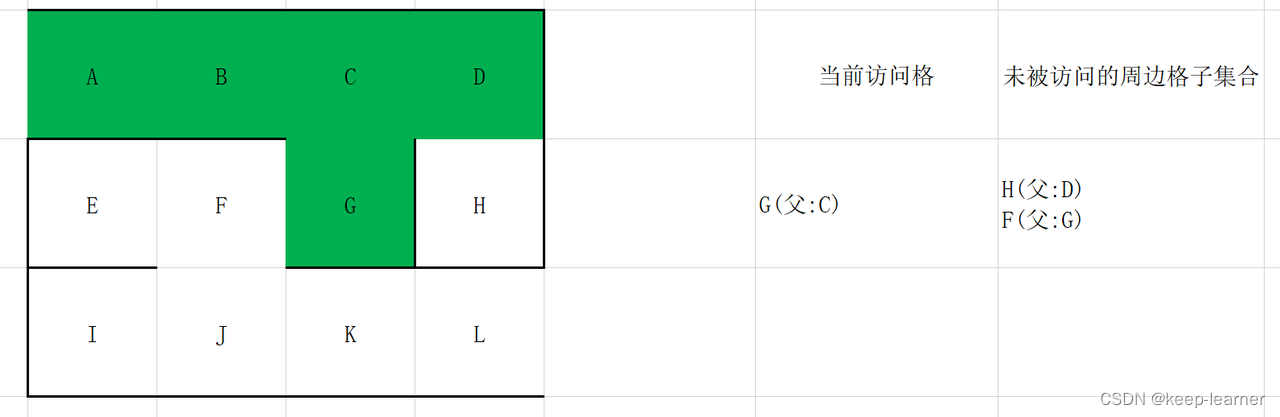
随机选择G,H。

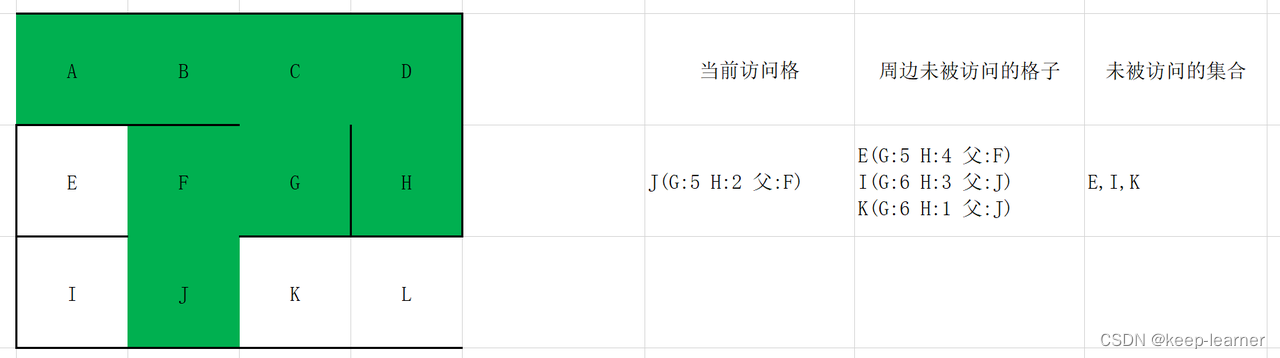


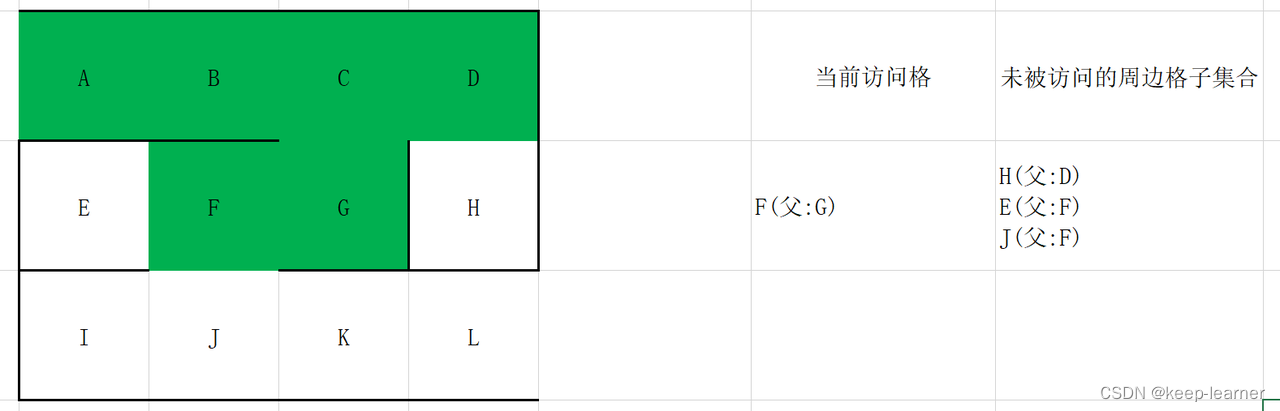
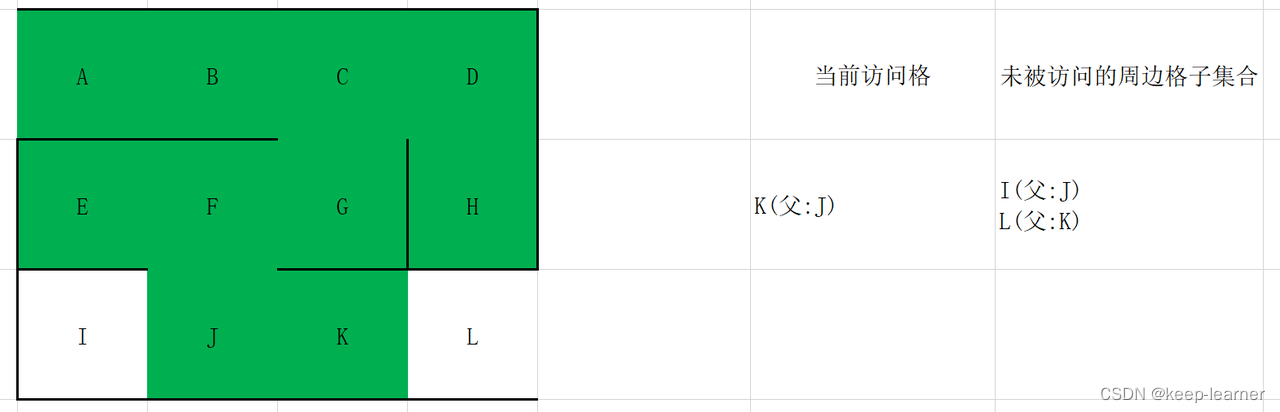
至此结束了整个流程。从L开始递归往回找父节点直到起点:L->K->J->F->G->C->B->A.
想法:图示示意了什么?有哪些理论上步骤实际上我们并没有使用到?
没错,在学习了A*寻路算法和迷宫的定义之后,我们很快就能发现有些变量实际上根本没有任何作用。比如G值,本质上是为了优化最佳路线而存在的值,在迷宫中因为不存在多条通路,所以根本没有更新过;F值只有在选择下一次访问格的时候做了个优先级判断罢了(从上面E和I没有被选择可以看出,优先级低的没有被选择到,可以少走一些循环判断),实际上并没有太大作用。
由此,我们想想,这个算法在解决迷宫问题上有没有优化的空间?
广度优先算法(自命名)
如果仔细观察思考,我们就会发现,A*寻路算法其实更多的是在有更多通路的情况下寻找到最优解的算法,类似于帝国时代2和英雄联盟的人物导航系统。


但我们迷宫的定义本身就是只有一条通路啊,从起点到地图里的每一点,都只有一种走法,那是不是就可以免去A*寻路算法里面那么多没必要的参数,只需要保证父节点就好了呢?答案是对的。
所以我们就可以有如下几步:
-
创建一个用于存储周边未访问格子的集合。
-
进行循环
-
选择起点作为当前访问格。
-
搜索当前访问格周围(上下左右)的格子。做如下判断:
-
如果这个格子之前被访问过或者被墙阻隔,那么忽略它,不做考虑。
-
如果这个格子没有被访问过,且没被墙阻隔,则把它放入到集合中,并将它的父节点设置为当前访问格,
-
-
更新当前访问格为未被访问的周边格子集合中随机一个格子。
-
-
结束循环直到走到终点格子。
-
从终点循着父节点一直走到起点的路程就是通路。
随机选择D或G。
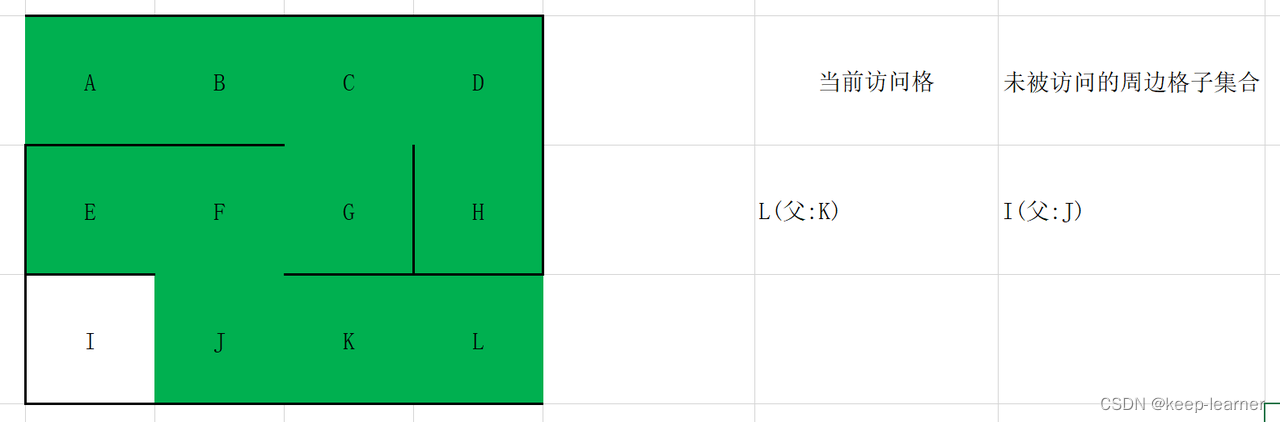
至此访问到了终点。从终点开始往其父节点递归至起点,L->K->J->F->G->C->B->A,就是整个解密流程。
想法:可以看到,A寻路算法可以有效地避开一些废点,比如上面的E和I,但是广度优先算法(自命名)不能保证,因为下一次的访问格是随机取的,可能会取到我们并不需要的格子。但广度优先算法简化了很多没必要的操作(比如计算F,G,H值),更容易被理解和接受。所以在解决迷宫这类问题的时候,我还是倾向于用广度优先算法而非A寻路算法。
思考
现在在广度优先遍历和深度优先遍历中选择,你认为哪种方式更好呢?

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









