








一、搭建这个nfs服务挂载
(1) sudo apt install nfs-kernel-server
(2) 然后在你的ubuntu创建一个nfs共享目录:
(3) sudo /etc/init.d/nfs-kernel-server restart 重启nfs服务
(4) 修改配置文件: sudo vim /etc/exports
在这个配置文件里面添加:/home/hao/Nfs *(rw,sync,no_root_squash)
注意事项如下图:

(5) 再次重启 sudo /etc/init.d/nfs-kernel-server restart
(6) sudo /etc/init.d/nfs-kernel-server status 查看状态,这里一般是成功的
然后开始要和板子关联起来,为了试验现象更明显,我在Nfs目录创建一个d.c文件:

接着在板子终端上面创建一个nfs文件夹,然后和我们的ubunut 挂载关联起来,我的ubuntu ip地址是192.168.1.103,你们的以你们电脑为依据,在ubuntu上查看ip地址的命令是ifconfig。
板子终端创建nfs文件夹:

然后进行挂载:mount -t nfs 192.168.1.103:/home/txp/Nfs /mnt/nfs -o nolock
就可以看到刚才在ubuntu下创建的d.c文件了:

这就关联起来了,以后在ubuntu上编译好的程序,就可以通过nfs服务传到板子上,也就是ubuntu那边传到Nfs文件夹,我板子的nfs文件夹下就可以看到对应的程序!
二、基于交叉编译完之后,需要移植哪些东西到开发板上
1、首先sqlite3交叉编译完,进入到arm_sqlite_install目录下的lib目录,这里面就是交叉编译出来的.so的动态库文件,如下图所示:
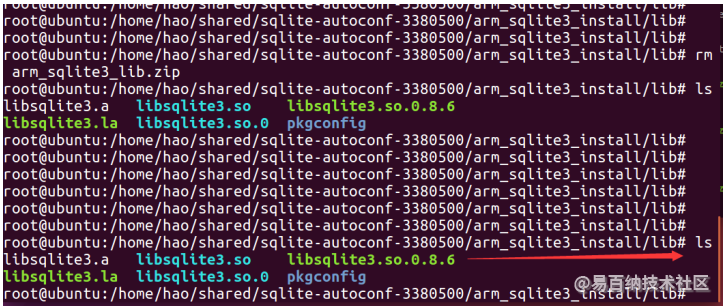
我们把这些动态库进行一个打包:
zip -r arm_sqlite3_lib.zip *so*

把这个打包文件拷贝到Nfs目录下去:
cp -rf arm_sqlite3_lib.zip /home/hao/Nfs/

2、把opencv交叉编译完之后,要拷贝的文件移植到Nfs目录下去:
先进入到build目录下的lib目录下,你会看到很多动态库,我对其打包:
zip -r arm_opencv_lib.zip lib*


3、把sdk里面的rknn动态库移植到Nfs目录下:
这是我放sdk的路径:
/home/hao/shared/rv1126_rv1109_linux_sdk_v1.8.0_20210224/external/rknpu/rknn/rknn_api/librknn_api/lib

4、工程程序移植到Nfs目录下:
- 移植人脸识别数据:

- 可执行程序:

- 数据库文件。这个默认程序里面暂时没有,可能忘记上传到gitee上了,我这里提供一份:
















 1028
1028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









