







关于laserOdometry.cpp部分的学习,主要是关于运动补偿和cere部分。
一、关于ceres部分的学习
ceres是google开源的一款优化库,现在在slam领域用的比较多,官方doc比较详细,等有时间专门学一下ceres。这里只是简单的针对aloam涉及ceres的部分进行学习理解。
官方地址:
Ceres Solver — A Large Scale Non-linear Optimization Library
涉及aloam是ceres里面的自动求导功能部分。
首先看lidarFactor.hpp部分中的LidarEdgeFactor部分:
struct LidarEdgeFactor
{
LidarEdgeFactor(Eigen::Vector3d curr_point_, Eigen::Vector3d last_point_a_,
Eigen::Vector3d last_point_b_, double s_)
: curr_point(curr_point_), last_point_a(last_point_a_), last_point_b(last_point_b_), s(s_) {}
template <typename T>
bool operator()(const T *q, const T *t, T *residual) const
{
Eigen::Matrix<T, 3, 1> cp{T(curr_point.x()), T(curr_point.y()), T(curr_point.z())};
Eigen::Matrix<T, 3, 1> lpa{T(last_point_a.x()), T(last_point_a.y()), T(last_point_a.z())};
Eigen::Matrix<T, 3, 1> lpb{T(last_point_b.x()), T(last_point_b.y()), T(last_point_b.z())};
//Eigen::Quaternion<T> q_last_curr{q[3], T(s) * q[0], T(s) * q[1], T(s) * q[2]};
Eigen::Quaternion<T> q_last_curr{q[3], q[0], q[1], q[2]};
Eigen::Quaternion<T> q_identity{T(1), T(0), T(0), T(0)};
q_last_curr = q_identity.slerp(T(s), q_last_curr);
Eigen::Matrix<T, 3, 1> t_last_curr{T(s) * t[0], T(s) * t[1], T(s) * t[2]};
Eigen::Matrix<T, 3, 1> lp;
lp = q_last_curr * cp + t_last_curr;
Eigen::Matrix<T, 3, 1> nu = (lp - lpa).cross(lp - lpb);
Eigen::Matrix<T, 3, 1> de = lpa - lpb;
residual[0] = nu.x() / de.norm();
residual[1] = nu.y() / de.norm();
residual[2] = nu.z() / de.norm();
return true;
}
static ceres::CostFunction *Create(const Eigen::Vector3d curr_point_, const Eigen::Vector3d last_point_a_,
const Eigen::Vector3d last_point_b_, const double s_)
{
return (new ceres::AutoDiffCostFunction<
LidarEdgeFactor, 3, 4, 3>(
new LidarEdgeFactor(curr_point_, last_point_a_, last_point_b_, s_)));
}
Eigen::Vector3d curr_point, last_point_a, last_point_b;
double s;
};它的成员变量有curr_point、last_point_a、last_point_b和s。
按照ceres的要求重载operator()运算符,中间的运算是将输入的参数分别按T类型强制转换成cp、
lpa和lpb。然后使用四元数球面插值法求出旋转的值,和按比例算出平移的值。最后将该点lb换算到前一帧的坐标系下。然后算出lp和lpa与lp和lpb组成的三角形的面积,叉乘算出面积nu,de是两点之间的距离。最后的残差就是算的点到直线lpa到lpb之间的距离。
另一个create部分就是针对前面设置的LidarEdgeFactor,进行初始化变量?目前还不是很理解,等完整的学习ceres后在做解答。
总结整个aloam中关于ceres的处理问题的流程:
首先定义ceres的problem:
ceres::Problem::Options problem_options;
ceres::Problem problem(problem_options);然后添加核函数和自定义加法:
ceres::LossFunction *loss_function = new ceres::HuberLoss(0.1);
ceres::LocalParameterization *q_parameterization =
new ceres::EigenQuaternionParameterization();将两个优化变量添加进problem:
problem.AddParameterBlock(para_q, 4, q_parameterization);
problem.AddParameterBlock(para_t, 3);最后进行自动求导:
ceres::CostFunction *cost_function = LidarPlaneFactor::Create(curr_point, last_point_a, last_point_b, last_point_c, s);
problem.AddResidualBlock(cost_function, loss_function, para_q, para_t);不知道理解的对不对,感觉还是有问题,等查找些ceres资料后,在修改。
二、激光lidar运动补偿
因为激光lidar在采集数据的时候,它是运动的,所以它采集到的数据并不是在统一坐标系下的。所以需要对激光lidar进行补偿,就是将一帧数据转换到统一坐标系下的,也是统一时间戳下。
一般来说是转换到这一帧的起始时刻,运动补偿公式:
现在激光lidar的驱动可以直接的采集每个点对应的时间戳,减少了前端部分补偿的难度。
在aloam里,运动补偿部分在laserOdometry.cpp中的TransformToStart和TransformToEnd函数。
首先是TransformToStart:
void TransformToStart(PointType const *const pi, PointType *const po)
{
//interpolation ratio
double s;
if (DISTORTION)
s = (pi->intensity - int(pi->intensity)) / SCAN_PERIOD;
else
s = 1.0;
//s = 1;
Eigen::Quaterniond q_point_last = Eigen::Quaterniond::Identity().slerp(s, q_last_curr);
Eigen::Vector3d t_point_last = s * t_last_curr;
Eigen::Vector3d point(pi->x, pi->y, pi->z);
Eigen::Vector3d un_point = q_point_last * point + t_point_last;
po->x = un_point.x();
po->y = un_point.y();
po->z = un_point.z();
po->intensity = pi->intensity;
}函数的两个参数:pi表示pointcloud_in、po表示pointcloud_out。
s表示比例,其中pi->intensity表示点云的强度值,在前面的点云数据预处理中,强度值的实数部分存的是Scan_id,虚数部分存的是该点相对于起始时刻的漂移。这里算出的s就表示该点的时间相当于整个帧时间的比例。这里的DISTORITION为false是因为kitti数据集已经做过运动补偿。
下面就是正式的补偿部分,
这里假设是匀速运动,使用上一帧的运动差值作为这一帧运动补偿的初始值。采用了四元数差值法
球面差值,简单来说就是计算两个四元数之间的插值方法,之后仔细学习一下。
Eigen::Quaterniond q_point_last = Eigen::Quaterniond::Identity().slerp(s, q_last_curr);因为假设匀速直线运动,所以上一帧的运动和这一帧是相同的,s表示从开始时刻到这点所用时间在这一帧的时间中的比例,所以利用上一个表示从开始时刻到结束时刻旋转的四元数来估算表示s这一时刻点相对于开始时刻的旋转四元数。
Eigen::Vector3d t_point_last = s * t_last_curr;这里比较容易理解,就是算出该点平移的距离。
Eigen::Vector3d point(pi->x, pi->y, pi->z);
Eigen::Vector3d un_point = q_point_last * point + t_point_last;这里就是算出经过计算后转换到开始时刻的点。
po->x = un_point.x();
po->y = un_point.y();
po->z = un_point.z();
po->intensity = pi->intensity;这里就是把算好的点赋值给po。
注意这里仅仅适用于匀速模型!
然后就是TransformToEnd函数:
void TransformToEnd(PointType const *const pi, PointType *const po)
{
// undistort point first
pcl::PointXYZI un_point_tmp;
TransformToStart(pi, &un_point_tmp);
Eigen::Vector3d un_point(un_point_tmp.x, un_point_tmp.y, un_point_tmp.z);
Eigen::Vector3d point_end = q_last_curr.inverse() * (un_point - t_last_curr);
po->x = point_end.x();
po->y = point_end.y();
po->z = point_end.z();
//Remove distortion time info
po->intensity = int(pi->intensity);
}它的功能是将点全部转换到结束时刻。里面的核心代码是:
Eigen::Vector3d point_end = q_last_curr.inverse() * (un_point - t_last_curr);推倒过程如下:
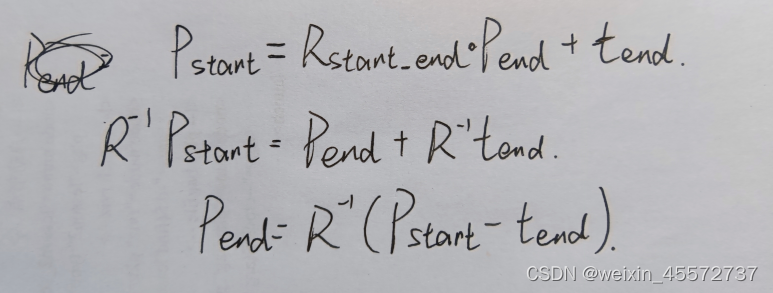
结合公式非常容易理解。
这里就是两种运动补偿的方式,如果使用的是kitti数据集就不用使用这两个函数,如果使用别的数据集,就需要将前面的DISTORITON设置为1。
三、main函数部分
ros::init(argc, argv, "laserOdometry");
ros::NodeHandle nh;
nh.param<int>("mapping_skip_frame", skipFrameNum, 2);初始化名为laserOdometry的节点,初始化句柄,然后设置参数服务器,从launch文件里面提取mapping_skip_frame并设置为2。
订阅部分:
ros::Subscriber subCornerPointsSharp =
nh.subscribe<sensor_msgs::PointCloud2>("/laser_cloud_sharp", 100, laserCloudSharpHandler);
ros::Subscriber subCornerPointsLessSharp =
nh.subscribe<sensor_msgs::PointCloud2>("/laser_cloud_less_sharp", 100, laserCloudLessSharpHandler);
ros::Subscriber subSurfPointsFlat =
nh.subscribe<sensor_msgs::PointCloud2>("/laser_cloud_flat", 100, laserCloudFlatHandler);
ros::Subscriber subSurfPointsLessFlat =
nh.subscribe<sensor_msgs::PointCloud2>("/laser_cloud_less_flat", 100, laserCloudLessFlatHandler);
ros::Subscriber subLaserCloudFullRes =
nh.subscribe<sensor_msgs::PointCloud2>("/velodyne_cloud_2", 100, laserCloudFullResHandler);这里订阅的是前面的点云预处理完成后发布的几个topic,就是几个不同的特征点。
laser_cloud_sharp:是曲率很大的线点;
laser_cloud_less_sharp:是曲率不那么大的线点;
laser_cloud_flat:比较明显的面点;
laser_cloud_less_flat:不那么明显的面点;
velodyne_cloud_2:是原始点云。
发布部分:
ros::Publisher pubLaserCloudCornerLast =
nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_corner_last", 100);
ros::Publisher pubLaserCloudSurfLast =
nh.advertise<sensor_msgs::PointCloud2>("/laser_cloud_surf_last", 100);
ros::Publisher pubLaserCloudFullRes =
nh.advertise<sensor_msgs::PointCloud2>("/velodyne_cloud_3", 100);
ros::Publisher pubLaserOdometry =
nh.advertise<nav_msgs::Odometry>("/laser_odom_to_init", 100);
ros::Publisher pubLaserPath =
nh.advertise<nav_msgs::Path>("/laser_odom_path", 100);这里也是发布的五个topic,具体的作用是什么,看后面的源码,它们中前3个是sensor_msgs::PointCloud2格式的,后面两个是分别是nav_msgs::Odometry和nav_msgs::Path格式。
nav_msgs::Path laserPath;
int frameCount = 0;
ros::Rate rate(100);然后就是生成了laserPath的对象和frameCount的计数。
然后就是while和ros::spinOnce()的联合使用。
在分析while里的内容之前,见看一下subscriber函数里面那些handler都做了哪些工作。
void laserCloudSharpHandler(const sensor_msgs::PointCloud2ConstPtr &cornerPointsSharp2)
{
mBuf.lock();
cornerSharpBuf.push(cornerPointsSharp2);
mBuf.unlock();
}
void laserCloudLessSharpHandler(const sensor_msgs::PointCloud2ConstPtr &cornerPointsLessSharp2)
{
mBuf.lock();
cornerLessSharpBuf.push(cornerPointsLessSharp2);
mBuf.unlock();
}
void laserCloudFlatHandler(const sensor_msgs::PointCloud2ConstPtr &surfPointsFlat2)
{
mBuf.lock();
surfFlatBuf.push(surfPointsFlat2);
mBuf.unlock();
}
void laserCloudLessFlatHandler(const sensor_msgs::PointCloud2ConstPtr &surfPointsLessFlat2)
{
mBuf.lock();
surfLessFlatBuf.push(surfPointsLessFlat2);
mBuf.unlock();
}
//receive all point cloud
void laserCloudFullResHandler(const sensor_msgs::PointCloud2ConstPtr &laserCloudFullRes2)
{
mBuf.lock();
fullPointsBuf.push(laserCloudFullRes2);
mBuf.unlock();
}五个subscriber函数对于subscriber的内容的处理框架都相同,都是采用多线程锁,然后将点云push到前面设置好的队列中去。注意队列是先进先出。
std::queue<sensor_msgs::PointCloud2ConstPtr> cornerSharpBuf;
std::queue<sensor_msgs::PointCloud2ConstPtr> cornerLessSharpBuf;
std::queue<sensor_msgs::PointCloud2ConstPtr> surfFlatBuf;
std::queue<sensor_msgs::PointCloud2ConstPtr> surfLessFlatBuf;
std::queue<sensor_msgs::PointCloud2ConstPtr> fullPointsBuf;
std::mutex mBuf;下面开始while部分:
while (ros::ok())
{
ros::spinOnce();
if (!cornerSharpBuf.empty() && !cornerLessSharpBuf.empty() &&
!surfFlatBuf.empty() && !surfLessFlatBuf.empty() &&
!fullPointsBuf.empty())
{
timeCornerPointsSharp = cornerSharpBuf.front()->header.stamp.toSec();
timeCornerPointsLessSharp = cornerLessSharpBuf.front()->header.stamp.toSec();
timeSurfPointsFlat = surfFlatBuf.front()->header.stamp.toSec();
timeSurfPointsLessFlat = surfLessFlatBuf.front()->header.stamp.toSec();
timeLaserCloudFullRes = fullPointsBuf.front()->header.stamp.toSec();
...
最开始的部分是先确定一下每个队列是否是空,然后取出每个队列中最早元素的时间戳。
if (timeCornerPointsSharp != timeLaserCloudFullRes ||
timeCornerPointsLessSharp != timeLaserCloudFullRes ||
timeSurfPointsFlat != timeLaserCloudFullRes ||
timeSurfPointsLessFlat != timeLaserCloudFullRes)
{
printf("unsync messeage!");
ROS_BREAK();
}判断一下是否与全部点云的时间一致,一般是一致的。
mBuf.lock();
cornerPointsSharp->clear();
pcl::fromROSMsg(*cornerSharpBuf.front(), *cornerPointsSharp);
cornerSharpBuf.pop();
cornerPointsLessSharp->clear();
pcl::fromROSMsg(*cornerLessSharpBuf.front(), *cornerPointsLessSharp);
cornerLessSharpBuf.pop();
surfPointsFlat->clear();
pcl::fromROSMsg(*surfFlatBuf.front(), *surfPointsFlat);
surfFlatBuf.pop();
surfPointsLessFlat->clear();
pcl::fromROSMsg(*surfLessFlatBuf.front(), *surfPointsLessFlat);
surfLessFlatBuf.pop();
laserCloudFullRes->clear();
pcl::fromROSMsg(*fullPointsBuf.front(), *laserCloudFullRes);
fullPointsBuf.pop();
mBuf.unlock();这里是将ros消息格式转换为pcl的格式,方便调用pcl库的处理函数。
后面是初始化,
if (!systemInited)
{
systemInited = true;
std::cout << "Initialization finished \n";
}重点在else里面,主要内容是针对于论文中将当前帧的角点和面点对上一帧中所有的点进行匹配。
int cornerPointsSharpNum = cornerPointsSharp->points.size();
int surfPointsFlatNum = surfPointsFlat->points.size();取出比较明显的角点和面点的个数,赋值给cornerPointsSharpNum和surfPointsFlatNum。
然后就是进行两次ceres优化。
ceres::LossFunction *loss_function = new ceres::HuberLoss(0.1);设置了一个核函数,当残差大于0.1就剔除。
ceres::LocalParameterization *q_parameterization =
new ceres::EigenQuaternionParameterization();设置广义的加法,因为旋转是不能直接相加的。
problem.AddParameterBlock(para_q, 4, q_parameterization);
problem.AddParameterBlock(para_t, 3);然后使用AddParameterBlock让ceres了解要优化的变量是旋转和平移。如果不不符合加法定义,这里就必须自己设置加法,如上所示。
下面两个for循环分别针对角点和面点进行寻找约束。
for (int i = 0; i < cornerPointsSharpNum; ++i)
{
TransformToStart(&(cornerPointsSharp->points[i]), &pointSel);将每一帧角点进行运动补偿,补偿到它起始的时刻。
kdtreeCornerLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);使用pcl里面的kdtree,在上一帧所有点构成的kdtree中寻找距离最近的一个点。并将两点直接的距离存到pointSearchSqDis里面,并将点云的索引值存在pointSearchInd里面。
int closestPointInd = -1, minPointInd2 = -1;
if (pointSearchSqDis[0] < DISTANCE_SQ_THRESHOLD)
{
closestPointInd = pointSearchInd[0];
int closestPointScanID = int(laserCloudCornerLast->points[closestPointInd].intensity);
double minPointSqDis2 = DISTANCE_SQ_THRESHOLD;设置了阈值DISTANCE_SQ_THRESHOLD,如果小于这个阈值就进入if里面。并取出该角点的scanId的值。
for (int j = closestPointInd + 1; j < (int)laserCloudCornerLast->points.size(); ++j)
{
// if in the same scan line, continue
if (int(laserCloudCornerLast->points[j].intensity) <= closestPointScanID)
continue;
// if not in nearby scans, end the loop
if (int(laserCloudCornerLast->points[j].intensity) > (closestPointScanID + NEARBY_SCAN))
break;
double pointSqDis = (laserCloudCornerLast->points[j].x - pointSel.x) *
(laserCloudCornerLast->points[j].x - pointSel.x) +
(laserCloudCornerLast->points[j].y - pointSel.y) *
(laserCloudCornerLast->points[j].y - pointSel.y) +
(laserCloudCornerLast->points[j].z - pointSel.z) *
(laserCloudCornerLast->points[j].z - pointSel.z);
if (pointSqDis < minPointSqDis2)
{
// find nearer point
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}这一部分一开始不太理解原因,这里kd使用的点是什么时候push进去的。然后整个代码翻了好久,突然想到,这个部分是if-else中的else,应该是在if后,才发现了push的部分。。。这给我一个启示,以后碰到if-else中如果if执行了,先跳过else看后面的内容。
这里是说如果它们处于同一scan就continue,如果不是相邻的scan,指的是2.5个线就直接break。然后计算上一帧中的点和当前点的距离方差寻找最小的记录index到minPointInd2上。
for (int j = closestPointInd - 1; j >= 0; --j)
{
// if in the same scan line, continue
if (int(laserCloudCornerLast->points[j].intensity) >= closestPointScanID)
continue;
// if not in nearby scans, end the loop
if (int(laserCloudCornerLast->points[j].intensity) < (closestPointScanID - NEARBY_SCAN))
break;
double pointSqDis = (laserCloudCornerLast->points[j].x - pointSel.x) *
(laserCloudCornerLast->points[j].x - pointSel.x) +
(laserCloudCornerLast->points[j].y - pointSel.y) *
(laserCloudCornerLast->points[j].y - pointSel.y) +
(laserCloudCornerLast->points[j].z - pointSel.z) *
(laserCloudCornerLast->points[j].z - pointSel.z);
if (pointSqDis < minPointSqDis2)
{
// find nearer point
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
}这里和上面的部分是对应的,从不同方向去寻找点。
if (minPointInd2 >= 0) // both closestPointInd and minPointInd2 is valid
{
Eigen::Vector3d curr_point(cornerPointsSharp->points[i].x,
cornerPointsSharp->points[i].y,
cornerPointsSharp->points[i].z);
Eigen::Vector3d last_point_a(laserCloudCornerLast->points[closestPointInd].x,
laserCloudCornerLast->points[closestPointInd].y,
laserCloudCornerLast->points[closestPointInd].z);
Eigen::Vector3d last_point_b(laserCloudCornerLast->points[minPointInd2].x,
laserCloudCornerLast->points[minPointInd2].y,
laserCloudCornerLast->points[minPointInd2].z);
double s;
if (DISTORTION)
s = (cornerPointsSharp->points[i].intensity - int(cornerPointsSharp->points[i].intensity)) / SCAN_PERIOD;
else
s = 1.0;
ceres::CostFunction *cost_function = LidarEdgeFactor::Create(curr_point, last_point_a, last_point_b, s);
problem.AddResidualBlock(cost_function, loss_function, para_q, para_t);
corner_correspondence++;
}判断是否找到距离最近的点,找到了就大于0。然后分别赋值给curr_point、last_point_a和last_point_b。
curr_point:是当前帧上的点;
last_point_a:是前一帧上最近的点;
last_point_b:是前一帧上和last_point_a最近的点。
然后就是使用ceres进行自动求导的功能。
下面是对于面点的处理:
for (int i = 0; i < surfPointsFlatNum; ++i)
{
TransformToStart(&(surfPointsFlat->points[i]), &pointSel);
kdtreeSurfLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);和线点一样,先将点转换到帧开始的时刻,然后使用kdtree寻找上一帧中与这个点最近的点,记录index值和距离值。
int closestPointInd = -1, minPointInd2 = -1, minPointInd3 = -1;
if (pointSearchSqDis[0] < DISTANCE_SQ_THRESHOLD)
{
closestPointInd = pointSearchInd[0];
// get closest point's scan ID
int closestPointScanID = int(laserCloudSurfLast->points[closestPointInd].intensity);
double minPointSqDis2 = DISTANCE_SQ_THRESHOLD, minPointSqDis3 = DISTANCE_SQ_THRESHOLD;算出最近点的scanid值并定义阈值。
for (int j = closestPointInd + 1; j < (int)laserCloudSurfLast->points.size(); ++j)
{
// if not in nearby scans, end the loop
if (int(laserCloudSurfLast->points[j].intensity) > (closestPointScanID + NEARBY_SCAN))
break;
double pointSqDis = (laserCloudSurfLast->points[j].x - pointSel.x) *
(laserCloudSurfLast->points[j].x - pointSel.x) +
(laserCloudSurfLast->points[j].y - pointSel.y) *
(laserCloudSurfLast->points[j].y - pointSel.y) +
(laserCloudSurfLast->points[j].z - pointSel.z) *
(laserCloudSurfLast->points[j].z - pointSel.z);
// if in the same or lower scan line
if (int(laserCloudSurfLast->points[j].intensity) <= closestPointScanID && pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
// if in the higher scan line
else if (int(laserCloudSurfLast->points[j].intensity) > closestPointScanID && pointSqDis < minPointSqDis3)
{
minPointSqDis3 = pointSqDis;
minPointInd3 = j;
}
}基于index开始往上找,如果不是邻近scan的就break,然后分别在当前scan或者低于当前scan的线里面寻找点,和在高于scan的线里面寻找点。距离分别赋予minPointSqDis2和minPointSqDis3。
for (int j = closestPointInd - 1; j >= 0; --j)
{
// if not in nearby scans, end the loop
if (int(laserCloudSurfLast->points[j].intensity) < (closestPointScanID - NEARBY_SCAN))
break;
double pointSqDis = (laserCloudSurfLast->points[j].x - pointSel.x) *
(laserCloudSurfLast->points[j].x - pointSel.x) +
(laserCloudSurfLast->points[j].y - pointSel.y) *
(laserCloudSurfLast->points[j].y - pointSel.y) +
(laserCloudSurfLast->points[j].z - pointSel.z) *
(laserCloudSurfLast->points[j].z - pointSel.z);
// if in the same or higher scan line
if (int(laserCloudSurfLast->points[j].intensity) >= closestPointScanID && pointSqDis < minPointSqDis2)
{
minPointSqDis2 = pointSqDis;
minPointInd2 = j;
}
else if (int(laserCloudSurfLast->points[j].intensity) < closestPointScanID && pointSqDis < minPointSqDis3)
{
// find nearer point
minPointSqDis3 = pointSqDis;
minPointInd3 = j;
}
}向下寻找,意思类似。
if (minPointInd2 >= 0 && minPointInd3 >= 0)
{
Eigen::Vector3d curr_point(surfPointsFlat->points[i].x,
surfPointsFlat->points[i].y,
surfPointsFlat->points[i].z);
Eigen::Vector3d last_point_a(laserCloudSurfLast->points[closestPointInd].x,
laserCloudSurfLast->points[closestPointInd].y,
laserCloudSurfLast->points[closestPointInd].z);
Eigen::Vector3d last_point_b(laserCloudSurfLast->points[minPointInd2].x,
laserCloudSurfLast->points[minPointInd2].y,
laserCloudSurfLast->points[minPointInd2].z);
Eigen::Vector3d last_point_c(laserCloudSurfLast->points[minPointInd3].x,
laserCloudSurfLast->points[minPointInd3].y,
laserCloudSurfLast->points[minPointInd3].z);
double s;
if (DISTORTION)
s = (surfPointsFlat->points[i].intensity - int(surfPointsFlat->points[i].intensity)) / SCAN_PERIOD;
else
s = 1.0;
ceres::CostFunction *cost_function = LidarPlaneFactor::Create(curr_point, last_point_a, last_point_b, last_point_c, s);
problem.AddResidualBlock(cost_function, loss_function, para_q, para_t);
plane_correspondence++;
}如果这两个点都找到了,就进行ceres的自动求导运算。这里使用的是面点的cere类。
TicToc t_solver;
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR;
options.max_num_iterations = 4;
options.minimizer_progress_to_stdout = false;
ceres::Solver::Summary summary;
ceres::Solve(options, &problem, &summary);
printf("solver time %f ms \n", t_solver.toc());这部分是确定使用ceres的哪个线形求解器和求解次数,使用的是稠密运算?不是很理解。
t_w_curr = t_w_curr + q_w_curr * t_last_curr;
q_w_curr = q_w_curr * q_last_curr;这部就是根据帧间计算里程计。
nav_msgs::Odometry laserOdometry;
laserOdometry.header.frame_id = "/camera_init";
laserOdometry.child_frame_id = "/laser_odom";
laserOdometry.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);
laserOdometry.pose.pose.orientation.x = q_w_curr.x();
laserOdometry.pose.pose.orientation.y = q_w_curr.y();
laserOdometry.pose.pose.orientation.z = q_w_curr.z();
laserOdometry.pose.pose.orientation.w = q_w_curr.w();
laserOdometry.pose.pose.position.x = t_w_curr.x();
laserOdometry.pose.pose.position.y = t_w_curr.y();
laserOdometry.pose.pose.position.z = t_w_curr.z();
pubLaserOdometry.publish(laserOdometry);然后就是将计算出来的q和t分别赋值给odometry并发布出去。
geometry_msgs::PoseStamped laserPose;
laserPose.header = laserOdometry.header;
laserPose.pose = laserOdometry.pose.pose;
laserPath.header.stamp = laserOdometry.header.stamp;
laserPath.poses.push_back(laserPose);
laserPath.header.frame_id = "/camera_init";
pubLaserPath.publish(laserPath);发布激光lidar的路径?
if (0)
{
int cornerPointsLessSharpNum = cornerPointsLessSharp->points.size();
for (int i = 0; i < cornerPointsLessSharpNum; i++)
{
TransformToEnd(&cornerPointsLessSharp->points[i], &cornerPointsLessSharp->points[i]);
}
int surfPointsLessFlatNum = surfPointsLessFlat->points.size();
for (int i = 0; i < surfPointsLessFlatNum; i++)
{
TransformToEnd(&surfPointsLessFlat->points[i], &surfPointsLessFlat->points[i]);
}
int laserCloudFullResNum = laserCloudFullRes->points.size();
for (int i = 0; i < laserCloudFullResNum; i++)
{
TransformToEnd(&laserCloudFullRes->points[i], &laserCloudFullRes->points[i]);
}
}转换到结束时刻?
pcl::PointCloud<PointType>::Ptr laserCloudTemp = cornerPointsLessSharp;
cornerPointsLessSharp = laserCloudCornerLast;
laserCloudCornerLast = laserCloudTemp;
laserCloudTemp = surfPointsLessFlat;
surfPointsLessFlat = laserCloudSurfLast;
laserCloudSurfLast = laserCloudTemp;
laserCloudCornerLastNum = laserCloudCornerLast->points.size();
laserCloudSurfLastNum = laserCloudSurfLast->points.size();这部分是将前面计算的几个角点分别赋值给temp值,然后转换。
if (frameCount % skipFrameNum == 0)
{
frameCount = 0;
sensor_msgs::PointCloud2 laserCloudCornerLast2;
pcl::toROSMsg(*laserCloudCornerLast, laserCloudCornerLast2);
laserCloudCornerLast2.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);
laserCloudCornerLast2.header.frame_id = "/camera";
pubLaserCloudCornerLast.publish(laserCloudCornerLast2);
sensor_msgs::PointCloud2 laserCloudSurfLast2;
pcl::toROSMsg(*laserCloudSurfLast, laserCloudSurfLast2);
laserCloudSurfLast2.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);
laserCloudSurfLast2.header.frame_id = "/camera";
pubLaserCloudSurfLast.publish(laserCloudSurfLast2);
sensor_msgs::PointCloud2 laserCloudFullRes3;
pcl::toROSMsg(*laserCloudFullRes, laserCloudFullRes3);
laserCloudFullRes3.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);
laserCloudFullRes3.header.frame_id = "/camera";
pubLaserCloudFullRes.publish(laserCloudFullRes3);
}
printf("publication time %f ms \n", t_pub.toc());
printf("whole laserOdometry time %f ms \n \n", t_whole.toc());
if(t_whole.toc() > 100)
ROS_WARN("odometry process over 100ms");
frameCount++;这里是向后段发布信息,skipFrameNum是设置发送的频率。发送了3个topic分别是:pubLaserCloudCornerLast、pubLaserCloudSurfLast和pubLaserCloudFullRes
四、总结
感觉有些部分理解的不是十分明白,有些部分存在疑问,等把整个源码看完和学习一下ceres后,在仔细修改修改。















 275
275











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









