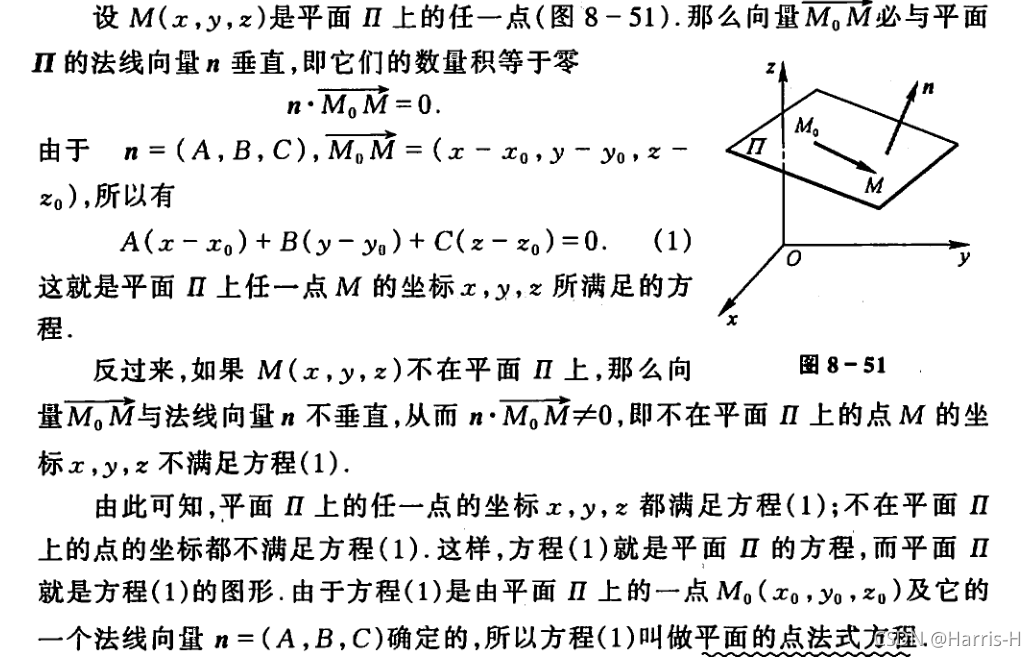
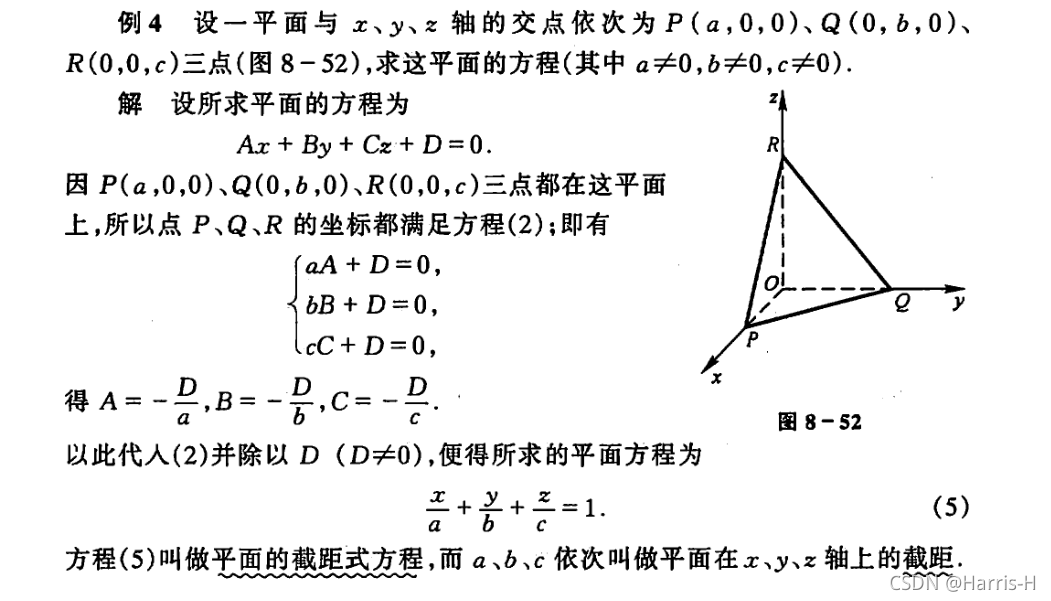
文章目录 平面的几种的方程表示1.平面的点法式方程2.平面的一般方程3.平面的截距式方程 平面的几种的方程表示 1.平面的点法式方程 已知三点,求平面方程。 用任意两个向量进行叉乘得到法向量,然后用点法式表示。 2.平面的一般方程 3.平面的截距式方程

























 5674
5674

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








