






开关电源调制模式和工作模式
开关电源定义
开关电源(Switch Mode Power Supply,简称SMPS)是一种高频化电能转换装置,利用现代电力电子技术,通过脉冲宽度调制(PWM)等方法,将一个位准的电压转换为用户所需的电压或电流。开关电源的输入多为交流电源(如市电)或直流电源,输出多为直流电源,适用于各种电子设备。
开关电源分类
开关电源的分类可以根据不同的标准进行划分,主要包括以下几种:
按工作原理分类:
- AC/DC开关电源:这类电源从交流电网取得能量,经过高压整流滤波得到一个直流高压,再由DC/DC变换器在输出端获得一个或几个稳定的直流电压,适用于不同功率需求,从几瓦到几千瓦。
- LED开关电源:主要用于LED照明设备,具有高频化、小型化、轻便化等特点,适用于高新技术领域。
按是否隔离分类:
- 隔离式开关电源:通过变压器实现输入与输出之间的电气隔离,适用于对安全要求较高的场合。
- 非隔离式开关电源:没有电气隔离,结构简单,成本较低,但安全性较低。
按电路结构分类:
- 单管DC/DC转换器:包括正激式、反激式等,适用于小功率应用。
- 双管DC/DC转换器:如双管正激式、双管反激式、推挽式、半桥式等,适用于中等功率应用。
- 四管DC/DC转换器:全桥DC/DC转换器,适用于大功率应用。
按调制方式分类:
- 脉冲宽度调制(PWM):这是最常见的调制方式,通过改变开关信号的脉冲宽度来控制输出电压。PWM允许在固定的工作频率下调整占空比,从而控制能量的传输
- 脉冲频率调制(PFM):通过改变开关信号的频率来控制输出电压,通常在轻载条件下使用以提高效率。PFM调制的开关频率会随负载变化而变化
- 混合调制:结合了PWM和PFM的优点,可以在不同的负载条件下自动切换。在轻载时使用PFM以减少开关损耗,在重载时使用PWM以提供更好的电压稳定性
- 相位调制:通过改变开关信号的相位关系来控制输出电压。这种调制方式常用于多相电源设计,可以降低输出电流的纹波和提高电源的动态响应
- 时间比例控制(TPC):这是一种基于时间的调制方式,通过调整开关元件的开关时间来控制输出电压。TPC通常与PWM或PFM结合使用,以提供更精细的控制
- 电流模式控制:通过监测开关元件的电流变化来实现调制。这种方式可以提供快速的瞬态响应和良好的负载调整率
- 电压模式控制:通过监测输出电压来调整开关元件的工作状态。与电流模式控制相比,电压模式控制的设计和实现相对简单
按功率分类:
- 单管单边型:主要用于小功率电路,如手机充电器、机顶盒电源等。
- 双管半桥型:适用于中等功率电器,如电脑主机电源、电瓶充电器等。
- 四管全桥型:主要用于大功率电器,如电焊机、通讯电源等。
按拓扑结构:
所谓电路拓扑就是功率器件和电磁元件在电路中的连接方式,而磁性元件设计、闭环补偿电路设计及其他所有电路元件设计都取决于拓扑,常见拓扑大约有14种
- Buck降压:将输入电压降低,输出电压总是小于或等于输入电压,输入电流不连续,输出电流平滑
- Boost升压:将输入电压升高,输出电压总是大于或等于输入电压,输入电流平滑,输出电流不连续。
- Buck-Boost降压-升压:结合了降压和升压电路的特点,输入和输出电流不连续。
- Flyback反激:输出电压可以大于或小于输入电压,适用于隔离应用,输入和输出电流不连续。
- Forward正激:采用变压器耦合,输出电流平滑,适用于多输出应用。
- Two-Transistor Forward双晶体管正激:两个开关同时工作,适用于高效率应用。
- Push-Pull推挽:全波拓扑结构,适用于高效率应用。
- Half Bridge半桥:适用于高电压应用,具有良好的变压器磁芯利用率。
- Full Bridge全桥:适用于高电压应用,初级电流较低。
- SEPIC:具有升降压功能,适用于宽范围输入电压。
- Cuk:具有快速响应和低纹波特性。
单管DC/DC和、双管DC/DC和四管DC/DC的主要区别
区别在于它们使用的开关管数量不同。 单管DC/DC转换器使用一个开关管,而双管DC/DC转换器使用两个开关管。
单管DC/DC转换器的工作原理是利用一个开关管进行高频开关动作,通常包含一个有源功率器件。通过控制开关管的导通和截止来储存和释放能量。这种转换器通常结构简单,成本较低,适用于一些功率要求不是特别高的场合。然而,单管DC/DC转换器在高压输入时可能需要更高的耐压器件,且占空比有一定限制。
双管DC/DC转换器则使用两个开关管,包含两个有源功率器件,通常用于需要更高功率输出的应用场景。用于高压输入、低压输出的场合。它的优点包括:两个开关管同时导通,每个开关管承受的电压较低,避免了漏感尖峰问题;输出功率更高,适用于更高功率的应用场景。双管DC/DC转换器还具有更好的安全性和稳定性,因为两个开关管在桥的对角线上,正常工作时同时开通和关断,没有直通危险
四管DC/DC变换器则包含四个有源功率器件,通常用于高功率输出的应用,如全桥DC/DC变换器。这种类型的变换器在高压、大电流的应用中表现出色,能够提供稳定的输出电压和电流
正激和反激
正激和反激是两种不同的开关电源技术,正激式开关电源是指使用正激高频变压器隔离耦合能量的开关电源,与之对应的有反激式开关电源。
正激式开关电源:
正激式开关电源中结构比较复杂,但输出功率很高,适用于100W-300W的开关电源,一般用在低压,大电流的开关电源,应用比较广泛。
如下图所示,对于正激式开关电源具体是指当开关管接通时,输出变压器充当介质直接耦合磁场能量,电能与磁能相互转化,使输入输出同时进行。在日常应用中也存在不足:如需要增加反电动势绕组(防止变压器初级线圈产生的反电动势把开关管击穿),次级多加1个电感进行储能滤波,因此相比反激式开关电源而言其成本较高,而且正激式开关电源变压器的体积要比反激式开关电源变压器的体积大。

反激式开关电源:
如下图所示,反激式开关电源是指使用反激高频变压器隔离输入输出回路的开关电激,它的变压器不仅起到变换电压传输能量的作用,同时还起到储能电感的作用,因此,反激式变压器类似于电感的设计。所有电路比较简单,容易控制,反激式在5W-100W的小功率方面应用非常广泛。对于反激式开关电源,当开关管导通时,变压器原边电感电流上升,由于反激电路输出线圈同名端相反,因此输出二极管截止,变压器储存能量,负载由输出电容进行能量供应,当开关管截止时,变压器原边电感感应电压反向,此时输出二极管导通,变压器的能量通过二极管向负载供电,同时对电容充电。

由对比可知,正激的变压器只有变压功能,整体可以看成一个带变压器的buck电路。反激的变压器可以看作一个带变压功能的电感,是一个buck-boost电路。总的来说,正激反激工作原理不同,正激是初级工作次级也工作,次级不工作有续流电感续流,一般是CCM模式。功率因数一般不高,而且输入输出和变比占空比成比例。反激是初级工作,次级不工作,两边独立开来,一般DCM模式下,但是变压器的电感会比较小,而且需要加气隙,所以通常适合中小功率情况。
正激变压器是理想的,不储能,但是由于励磁电感是有限值,励磁电流使得磁芯会大,为避免磁通饱和,变压需要辅助绕组进行磁通复位。反激变压器工作形式可以看作耦合电感,电感先储能再放能,由于反激变压器的输入、输出电压极性相反,故当开关管断开之后,次级可以提供磁芯一个复位电压,因而反激变压器不需额外增加磁通复位绕组。
DCDC
DCDC按拓扑结构主要分为三种:Buck、Boost和Buck-Boost。
Buck拓扑结构是一种降压电路,其工作原理是在开关管导通时,输入电压通过电感对负载供电,并在开关管断开时通过二极管续流,从而保持输出电压稳定。Boost拓扑结构则是一种升压电路,通过电感储能和开关管控制来实现输出电压高于输入电压。Buck-Boost拓扑结构则结合了Buck和Boost的特点,实现升降压功能12。
除了基本的Buck、Boost和Buck-Boost拓扑结构外,还有一些衍生和复杂的拓扑结构。例如,三电平DC-DC拓扑结构通过控制开关器件的开关状态来实现输入电压与输出电压之间的转换,具有高电平、中电平和低电平三种状态。此外,还有一些特殊的拓扑结构,如SEPIC和Zeta拓扑,它们具有输出电压可正可负的特点
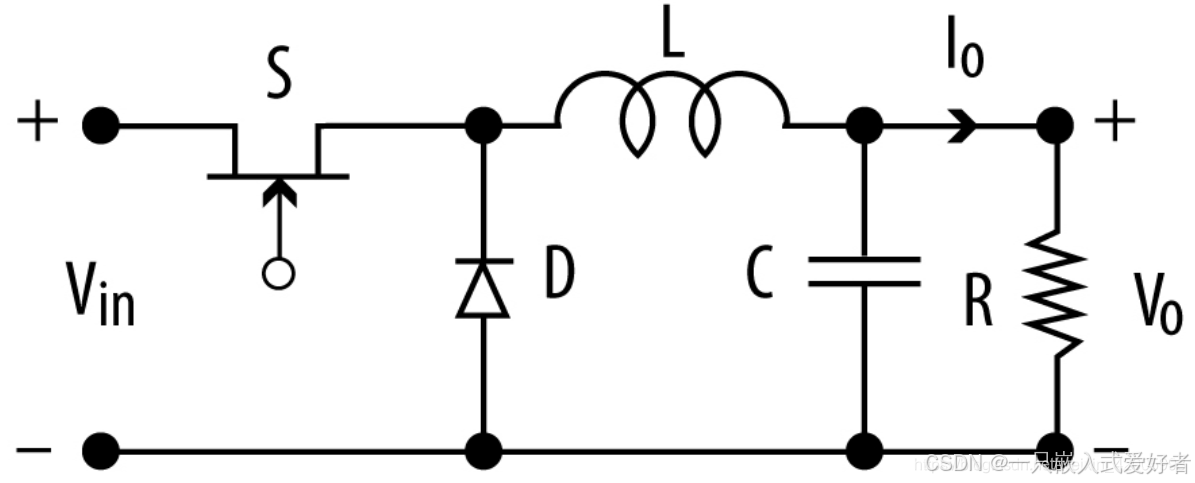
BUCK原理

开关管闭合时,能量一部分储存在电感L中,一部分供给输出;开关管断开时,L通过二极管D为输出端提供能量。

BOOST原理

当开关管导通的时候,输入的电压对电感充电;当开关管关断时,输入的能量和电感能量一起向输出提供能量,因此这时候输出的电压肯定就比输入的电压高,从而实现升压。

BUCK-BOOST原理

开关管导通,二极管D反向截止,电感器储能。开关管断开,电感存储的能量通过二极管传给输出端。

当D=0.5时,Vo=Vin:当D<0.5时,Vo<Vin:当D>0.5时,Vo>Vin。
异步整流和异步整流
DCDC转换器通常是同步整流。 同步整流采用导通电阻极低的专用功率MOS管,取代整流二极管以降低整流损耗,从而提高DC-DC转换器的效率,并且不存在由肖特基势垒电压而造成的死区电压。
同步整流
同步整流是采用导通电阻Rdson极低(一般为毫欧级别)的功率 MOS(G2),取代整流二极管以降低整流损耗。它能大大提高DC-DC转换器的效率,并且不存在由肖特基势垒电压而造成的死区电压,如下图拓扑所示。

功率MOS属于电压控制型器件,它在导通时的伏安特性呈线性关系。用功率MOS做整流器时,要求栅极电压必须与被整流电压的相位保持同步才能完成整流功能,故称之为同步整流。 这种整流方式能大大提高DC-DC转换器的效率,并且在轻负载时能维持连续工作,减少振铃现象。
在相同的条件下,MOS管的导通电压降远远小于肖特基二极管的正向导通压降的,所以MOS管的损耗功率远远比二极管小。
但是同步整流中,上下MOS管需要额外的驱动电路,使得上下两个MOS管能够同步,而非同步的二极管是自然整流的,不需要额外添加驱动控制电路,所以对于非同步,同步的电路会复杂一些。同时,MOS管不是理想的开关,它有开通时间和关断时间,如果上下两个管子的死区时间没有控制好,使上管的关断时间和下管的开通时间有重叠,造成直通现象,那么MOS管就会因电流过大而损坏。
异步整流
异步整流只有一个高边MOS管(G1),加一个续流二极管(D1)组成,因为是自然续流过程,相对于同步来讲,被称为异步整流,如下图拓扑所示。

由于二极管的电压降恒定,所以当流过二极管的电流很大的时候,二极管上的功率损耗所占的比重就会变大,因此导致在大电流时,DCDC 的工作效率非常低。但在输入电压比较高的时候使用试可以的,这是由于在输出电压高时,二极管的正向导通压降所占的比重小,对效率的影响比较低。
异步整流属于自然整流,没有下边的 MOS 管,因此不需要特殊的控制电路进行同步,所以设计上相对简单。
同步和异步整流区别
同步整流使用通态电阻极低的MOSFET管代替二极管,降低了损耗但提高了成本;而异步整流使用二极管,轻载时损耗较大,但成本较低。同步整流适用于高效要求高的应用,而异步整流则适用于成本敏感的应用
同步和异步整流优缺点
1、对于异步整流,当降压比高时,续流二极管的导通时间长,而如果 Vout 低,整体损耗比例会因为续流二极管的 VF 而变大
2、当输出电流比较大时,同步整流的效率要比异步整流的高,一般同步整流在负载是 1A 时,效率能到 95%,异步整流的话只能到 80% 左右,主要是因为异步整流的二极管损耗比同步整流的 MOS 管损耗大,从而导致异步整流的效率比较低,如下图所示:

3、轻载时,异步效率低,但工作状态好;同步效率高,但会产生振铃
- 在轻负载时,异步整流的效率要高于同步整流。这是因为轻载时,因为同步拓扑结构中,当电感中存储的电流降为0后,由于下侧 MOS 管并没有关闭,这时输出电容 Cout 的一部分电流会给电感充能,从而会有电感电流为负的情况,直到下一个上侧 MOS 管(G1)的导通周期到来(有的同步整流可以控制轻负载的模式,控制不让反向电流流过);而异步拓扑结构中,由于二极管是单向导通,当电感存储的电流降为0后,电感和二极管就没有电流流过了,因此轻载时,异步整流的效率较高。
- 在轻载时,同步整流的工作状态更好,异步整流由于工作在不连续模式会产生振铃。这是因为轻载时,负载电流较小。此时,因为异步拓扑中,二极管电流只能朝着一个方向流动,有时会变成 0 A,会呈现断续工作模式,此时的二极管的损耗反而降低了,但是由于工作在不连续模式,开关节点将发生振铃,产生高谐波噪声;而同步拓扑中,在 MOS 管导通的情况下,电流会有两个方向的流动以维持并稳定连续工作,此时同步拓扑工作在连续模式,损耗不会减小,但是开关节点不会产生振铃。

DCDC调制模式
DC-DC转换器的调制模式主要包括PWM(脉冲宽度调制)、PFM(脉冲频率调制)和PSM(脉冲跨周期调制)三种。

PWM(Pulse Width Modulation,脉冲宽度调制)
PWM是一种固定开关周期,变化Ton来改变占空比的调制方式。PWM方式,可称之为定频调宽,即开关频率保持恒定,而通过改变在每一个周期内的驱动信号的占空比来达到调制的目的,这是最常用的一种调制方式。当输出电压发生变化时,通过环路的控制,便会使驱动信号的占空比发生改变,从而维持输出电压的恒定,是最常用的调制方式。
PWM控制模式下的SW波形/电感电流/输出电压纹波(CCM模式)如下图,PWM模式并不局限于CCM。DCDC在不同的工作模式下都可以使用PWM调制,包括CCM和DCM。

在PWM模式下,开关频率是固定的,不随负载变化而变化。PWM模式通过改变开关的通断时间来调节输出电压,因此在负载变化时,占空比会相应变化。
电感电流通常是连续的,电感电流的纹波大小取决于电感值、开关频率和占空比。在PWM模式下,由于频率固定,电流纹波通常较易预测和控制。电感电流的形状随占空比的变化而变化,但频率保持不变。
在PWM模式下,由于开关频率固定,输出电压纹波通常较小,且频率特性好,便于滤波。输出电压纹波的频率成分较单一,主要由开关频率及其谐波组成。由于纹波的频率成分较为集中,滤波设计相对简化。
在PWM控制模式下,开关电源工作时产生的EMI和RE辐射,频段固定,那么谐波也固定的,所以在排查的时候比较好反推。
PWM控制模式的优点
- 效率高:PWM控制模式在重负载条件下效率较高,因为开关频率固定,减少了开关损耗。PWM是从处理器到被控系统信号都是数字形式的,再进行数模转换。可将噪声影响降到最低。
- 控制简单:PWM控制模式相对于其他调制方式来说,其控制电路相对简单,易于实现
- 输出纹波小:由于开关频率固定,输出电压纹波的频率特性好,纹波电压小,线性度高,便于滤波,从而减少输出电压中的波动
- 响应速度快:PWM控制模式的响应速度较快,适合于动态变化较大的负载环境
PWM控制模式的缺点
- 轻负载效率低:在轻负载条件下,由于开关次数固定,开关损耗成为主要损耗,导致效率降低,轻负载下其效率很低。
- 噪声问题:在轻负载时噪声大
- 频率受限:PWM控制模式的频率受到限制,不适合用于高频应用。由于误差放大器的影响,回路增益及响应速度也会受到限制
PWM控制模式适用场景
- 重负载应用:PWM控制模式适合于重负载和恒定频率的应用,如工业控制系统和电动汽车充电器
- 需要快速响应的应用:对于需要快速响应的系统,如动态变化的负载环境,PWM控制模式是一个很好的选择
- 对纹波要求严格的应用:在对输出电压纹波要求严格的应用中,PWM控制模式可以提供较小的输出纹波
PFM(Pulse Frequency Modulation,脉冲频率调制)
PFM模式在正常工作时,驱动信号的脉冲宽度保持恒定,但脉冲出现的频率发生改变,即所谓的定宽调频。当输出电压发生变化时,通过环路的调整,而使脉冲出现的频率发生改变,从而实现对电路的控制与调整。PFM又可以分为恒定驱动信号的高电位时间以及恒定驱动信号的低电平时间两种方式。在具有模式切换的DC-DC电路中,PFM也是很常见到的一种调制。
在这种模式下,电源工作在离散的开关状态,而不是连续导通。当输入电压高于输出电压设定值时,电源会快速打开开关,让电流通过;然后迅速关闭开关,中断电流流动,形成一个个矩形波脉冲。通过调整开关周期的长度,即“开”与“关”的比例,可以控制平均输出电压,从而达到高效能和稳定输出的目的。
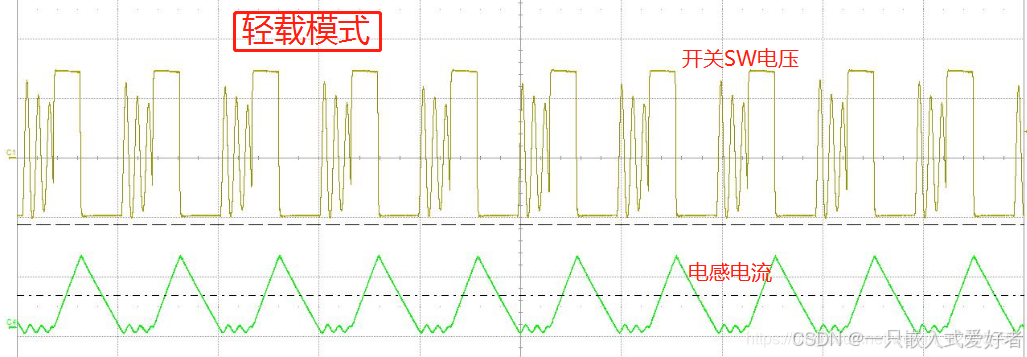
PFM控制模式下的SW波形/电感电流/输出电压纹波如下图

在PFM模式下,开关频率不是固定的,而是根据负载的变化而变化。在轻负载或空载条件下,频率会降低,以减少开关损耗和提高效率。PFM模式通过改变开关的通断时间来调节输出电压,因此在负载变化时,占空比也会相应变化。
在轻负载条件下,电感电流可能是不连续的,这意味着在每个开关周期内,电感电流都会降至零。由于频率的降低,电感电流的纹波可能较大,特别是在频率较低时。在PFM模式下,电感电流的波形可能更复杂,因为频率和占空比都在变化。
在PFM模式下,由于开关频率的变化,输出电压纹波可能较大,特别是在轻负载条件下。输出电压纹波的频率成分更复杂,因为开关频率在不断变化。由于纹波的频率成分较宽,滤波设计可能更具挑战性。
由于频率的变化,SW波形的脉冲间隔不是固定的,这可能导致电磁干扰(EMI)问题,因为干扰的频率成分分布在更宽的范围内。
PFM控制模式的优点
- 轻负载效率高:在轻负载或空载条件下,PFM模式通过降低开关频率来减少开关损耗,从而提高了电源效率,并且频率特性也十分好,对于外围电路一样的PFM和PWM而言,其峰值效率PFM与PWM相当,但在峰值效率以前,PFM的效率远远高于PWM的效率,这是PFM的主要优势
- 电路设计较简单:与PWM(脉冲宽度调制)模式相比,PFM模式的控制电路通常较简单,因为它不需要复杂的时钟和计数器电路
- 待机功耗低:在待机状态下,PFM模式可以使电源工作在极低的频率下,从而降低了能量消耗
PFM控制模式的缺点
- 在重负载的情况下,其效率会明显低于PWM方式
- 输出纹波较大:由于开关频率的变化,PFM模式下的输出电压纹波可能较大,特别是在轻负载条件下
- EMI问题:PFM模式下,开关频率的变化可能导致较宽频率范围的电磁干扰(EMI)问题,这可能需要额外的滤波措施。由于其纹波的频谱比较分散,没有多少规律,这使得滤波电路的设计变得十分复杂与困难
- 输出稳定性较差:与PWM模式相比,PFM模式在负载变化时的输出稳定性可能较差
- 响应速度较慢:在负载快速变化时,PFM模式的响应速度可能不如PWM模式快
PFM控制模式适用场景
- 小功率和低功耗应用:PFM模式适用于小功率和低功耗的应用,如便携式设备和电池供电的系统
- 轻负载或变负载环境:在轻负载或变负载环境下,PFM模式可以通过调整开关频率来优化电源性能
- 待机状态:在待机状态下,PFM模式可以有效降低能量消耗
PSM(Pulse Skip Modulation,脉冲跨周期调制)
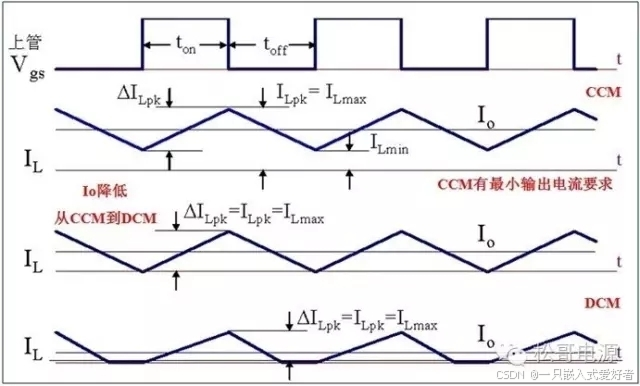
通常在满输出负载时,DCDC变换器工作于CCM即连续电流模式。但是在轻载或者空载时,如果继续采用固定频率的PWM模式,由于负载电流变小,因此输出功率Pout变小;而PWM频率不变意味着开关管频率不变,则开关管的损耗(主要是开关损耗)不变,相应地损耗频率所占比例就变大,从而降低了电源的输出转换效率。因此,为了提高电源在轻载时的转换效率,一般会采用其他工作模式,比如常见的PSM模式、Burst Mode突发模式、FCCM强迫连续模式(该模式不会提高输出效率)
PSM方式,可称之为定频定宽。其驱动信号的频率与宽度都保持恒定,只是,当负载为最重的情况时,驱动信号满频工作,当负载变轻时,驱动信号就会跳过一些开关周期,在被跨过的周期内,开关功率管一直保持为关断的状态。当负载发生变化时,通过改变跨周期出现的次数,来实现对系统的调整与控制。
对于恒定频率的常规的非同步Buck控制器,通常电感的电流工作于CCM连续电流模式,电感的平均电流即为输出的负载电流。当负载电流降低时,电感的平均电流也将降低;当负载电流降低时一定值,变换器进入临界电流模式。此时,若负载电流进一步的降低,电感的电流回到0后,开关周期还没有结束,由于二极管的反向阻断作用,电感的电流在0值处保持一段时间,然后开关周期结束,进入下一个开在周期,此时变换器为完全的非连续电流模式。
变换器进入非连续电流模式后,若负载电流仍然进一步的降低,为了维持输出电压的调节,高端的开关管的开通时间将减小,直到达到控制器的最小导通时间。高端的开关管的开通时间达到控制器的最小导通时间后,若负载电流仍然的降低,控制器就必须屏蔽掉即跳掉一些开关脉冲,以维持输出电压的调节。这种控制方法即为PSM。
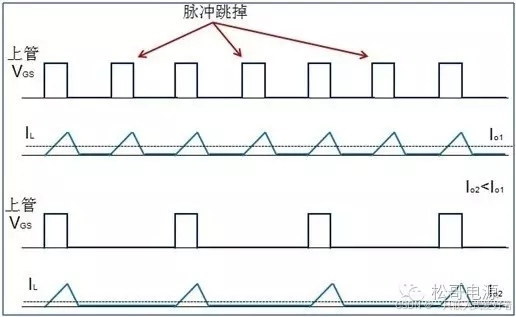
PSM可以在最宽的输入电流范围内提供恒定频率的不连续电流操作,防止反向电感器的电流。在PSM模式下,开关电源通过快速开启和关闭其功率开关管(如 MOSFET),只让电流在高频脉冲状态动,大部分时间处于休眠状态,实际工作时间短于整个周期。
相对于前面的两种控制方式,PSM方式在工业上的应用要晚一些。相比于PWM方式,在轻负载的情况下,PSM要有更高的效率,并且其开关损耗与系统的输出功率成正比,与负载的变化情况关系不大,不过其轻载的工作效率不如突发模式操作。此外,这种调控方式会使输出电压有着比较大的纹波电压,不适合用于为对电源电压精度要求很高的一些系统供电,提供了一种工作效率和和纹波的折中方案。
PSM控制模式下的SW波形/电感电流/输出电压纹波如下图

在非满载条件下,电感电流可能表现为不连续导通模式(DCM),这意味着在每个开关周期结束后,电感电流会降至零。电感电流的峰值与谷值之间的差异较大,特别是在负载变化频繁的应用中,这可能导致更大的纹波电流。
由于PSM模式在轻载时倾向于跳过更多的开关周期,因此轻载时的输出电压纹波通常较大。对于对电压稳定性要求极高的应用,可能需要通过增加输出电容或其他滤波手段来减小这种影响。
噪声特性稳定:尽管PSM模式存在较大的输出电压纹波,但其频率固定不变,使得噪声特性较为集中,便于进行针对性的电磁兼容(EMC)设计。
PSM控制模式的优点
- 高效率:在轻负载条件下,PSM模式跳过不必要的开关周期,显著降低了开关损耗,从而提高了效率
- 降低开关损耗:由于只在必要时进行开关操作,因此减少了开关次数,延长了开关管的使用寿命
PSM控制模式的缺点
- 大输出电压纹波:由于在轻负载时许多开关周期被跳过,PSM控制模式下的输出电压纹波较大,对于对电压稳定性要求高的应用场景不太适合
- 响应速度较慢:PSM模式在负载变化时需对跨过的周期数进行调整,这一过程相对较慢,导致响应速度不及PWM模式
- 复杂的控制逻辑:根据负载调整开关周期需要复杂的逻辑控制,这会增加设计和实现的难度
PSM控制模式适用场景
- 适用于轻负载效率高的场合:如待机状态较多的电子设备、间歇工作的仪器仪表等,这些场景下使用PSM模式可以显著延长设备的工作时间
- 不适用对电压稳定性要求高的系统:例如精密仪器或高性能模拟电路,这类应用对电源的精度要求较高,PSM模式因输出电压纹波大而不适合
- 适用于负载变化不大的场合:在负载相对稳定的应用中,PSM模式能够提供稳定的输出,同时兼顾效率和功耗
突发工作模式(Burst Mode)
Buck突发模式的原理图见下图所示。VFB为输出电压反馈脚,VEA为电压误差放大器,VREF为参考电压,突发工作模式比较器上限电压和下限电压为VH和VL,通过检测ITH管脚电压VC来检测输出负载的变化。
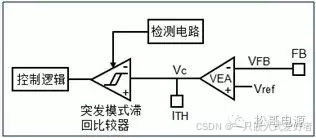
正常工作时,系统不会进入突发工作模式,突发工作模式比较器不工作,当输出负载降低时,输出电压将提高,VFB相应的也提高,由于VEA为负反馈,因此VC随之降低。当输出负载降低到一定的值时,系统进入到轻载模式后,突发工作模式比较器开始工作,接管对ITH管脚电压VC的控制,突发工作模式比较器的输出信号使控制电路将高端MOSFET的输出驱动关断,高端MOSFET停止开关操作,此时输入不再向输出端传输能量,输出的大电容将维持低的输出负载,因此输出电压慢慢的降低,VFB相应的也降低,VC随之提高。
输出电压继续的降低,VFB的电压相应的也继续的降低,VC随之继续提高。经过一段长的时间后,VC电压将增加到等于VH,突发工作模式比较器输出信号翻转,控制电路使能高端MOSFET的驱动输出信号,高端MOSFET进入开关操作,系统进入正常的PWM操作,由于输入的能量大于输出负载所消耗的能量,因此输出电压将随之提高。
当输出电压提高到一定值时,VC电压降低,VC电压降低到VL时L,突发工作模式比较器输出又一次的翻转,重新关断高端MOSFET的驱动信号,系统再一次停止工作。如此反复,这种工作模式即为突发工作模式。
突发模式比较器控制高端开关管工作,高端开关管工作的时间很短,停止工作的时间很长,极大的降低了开关损耗,在此期间,芯片内部的许多功能停止工作,减小内部静态电流的消耗,因此提高系统的效率。
另一方面由于高端开关管停止工作的时间很长,输出电容将维持输出的负载的能量,输出电容的电压降低幅度较大,因此输出电容的纹波电压大,即输出的纹波电压大。突发工作模式比较器的上下门限电压决定了输出电压纹波值。
这种模式和滞回电压模式有点类似,但不同的是,这种模式通过内部的检测确定输出负载的变化,从而决定系统是否进入轻载的突发模式。在突发模式中,比较器输出信号翻转系统进入正常工作时,系统为正常的定频PWM工作,高端MOSFET进入正常的PWM工作,此时系统工作在连续PWM模式或断续与连续PWM并存的模式,能量很快的向输出传送,只要工作几个周期后便停止工作。
突发模式通常可以看作是PWM模式在极轻载或空载情况下的一种效率优化扩展或优化策略,通过间歇关断提升效率,但带来更大的输出纹波,两者并非对立,而是相互补充,经常集成在同一个转换器中,动态切换以适应负载变化:
- 转换器在重载时维持PWM模式以保持稳定输出,偏重输出稳定性
- 在负载下降时transition(动态切换)到突发模式以优化轻载效率,突发模式偏重高效率。
- 突发模式和PWM模式的结合,被广泛应用于高效DC-DC转换器设计中。现代转换器通常能根据负载和工作条件,在两者间自动切换,以实现效率和性能的动态平衡。
突发模式和PSM的关系及区别
相同点:
- 目标: 两者都旨在提高轻载或空载条件下的效率,主要通过减少开关次数降低功耗,但方式有所不同。
- 开关频率调整: 都会通过降低开关频率来减少损耗,但实现方式不同,突发模式通过周期性完全关闭开关;PSM通过动态跳过部分脉冲来降低频率。
不同点:
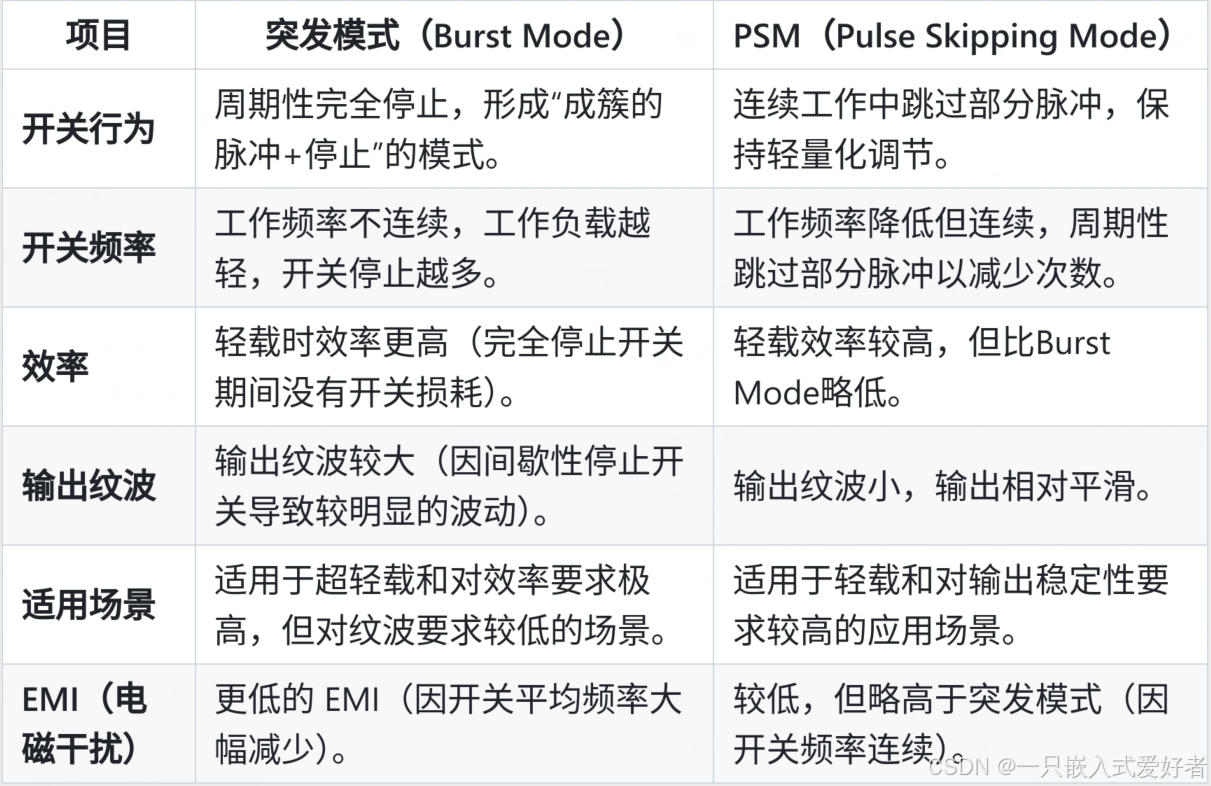
突发模式(Burst Mode)优势为极限能效优先。适用于便携设备、电池供电设备,如:待机模式下的手机、智能手表;低功耗IoT设备(如传感器节点)。劣势为输出纹波较大,不适用于对电源噪声敏感的高精度设备。
PSM优势为轻载性能与稳定性平衡,适用于对稳定输出要求较高的系统,如:通信基站供电模块;工业应用中的控制系统电源。劣势为比突发模式的轻载效率稍低,关闭开关的彻底性不如突发模式。
突发模式和PSM的联系:
- 轻载效率策略的协同使用:
在许多DC-DC转换器设计中,突发模式和PSM是可以结合使用的。例如:- 中轻载: 转换器先利用PSM模式,通过减少开关周期的次数(即脉冲跳跃)维持较好的效率和输出平滑性;
- 极轻载/空载: 当负载进一步降低时,转换器自动切换到突发模式,通过完全间歇关断来提升效率。
- 动态切换:
突发模式和PSM经常作为轻载优化的不同阶段。例如:- 当负载降低到某个设定值后,PSM自动转为突发模式;
- 突发模式主要用于超低功耗需求,而PSM提供相对平滑的轻载过渡。
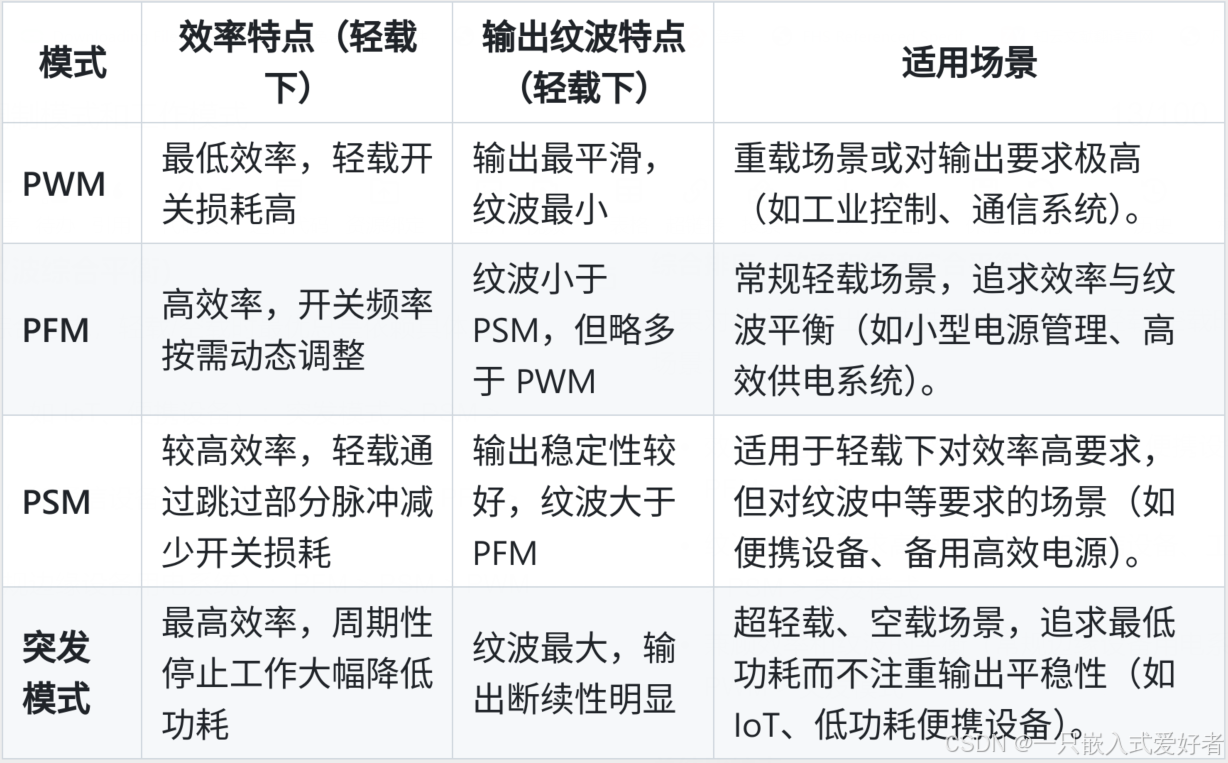
PWM、PFM、PSM和突发模式对比
效率排序(从高到低,轻载/空载情况下)
在轻载或空载条件下,效率排序如下:突发模式 > PSM > PFM > PWM
具体分析如下:
- 突发模式(Burst Mode):
效率最高,因为在轻载/空载时,开关周期性完全停止,完全无开关损耗。这是实现超低功耗的重要模式,尤其适合对待机功耗敏感的应用。 - PSM(Pulse Skipping Mode):
相比突发模式更注重保持输出的连续性,但仍通过跳跃部分脉冲来降低开关次数,减少功耗。降低了开关损耗,效率也非常高,但开关操作没有完全“停机”,因此效率略低于突发模式。 - PFM(Pulse Frequency Modulation,脉频调制):
在轻载时,通过降低开关频率来减少开关损耗,效率略低于PSM。相比PWM更适合轻载功耗优化,但仍然保持一定的开关频率,比PSM消耗更多能量。 - PWM(Pulse Width Modulation,脉宽调制):
此模式下开关频率是恒定的,不会动态变化,因此轻载/空载时因为开关损耗和传导损耗较大,效率最低。适合重载情况下高效连续供电,但在轻载时效率表现较差。
总结:
- 突发模式最佳用于极轻载或空载情况下的功耗优化;
- PSM和PFM是介于效率和输出平稳性之间的折中方案;
- PWM最不适合轻载条件,但在重载情况下效率较高。
输出纹波排序(从低到高,轻载/空载情况下)
在考虑轻载/空载条件下的输出纹波表现时,排序如下:PWM < PFM < PSM < 突发模式
具体分析如下:
- PWM:
输出纹波最小,因为它保持恒定的开关频率和占空比,输出电压调整非常平稳。即使在轻载条件下,虽然效率较低,但输出是完全连续调节的,纹波自然最小。 - PFM:
通过调节开关频率来保持输出,频率变化可以导致一定的纹波,但仍比PSM和突发模式更平滑。输出电压的变化平稳程度取决于频率调节的动态范围。 - PSM:
PSM通过跳跃部分开关脉冲,所以输出中的小波动会随跳过脉冲的时间间隔产生。在轻载条件下,输出平稳性比突发模式好,但不如PFM或PWM模式。 - 突发模式:
输出纹波最大,因为开关在“完全停止”和“突发运行”之间周期振荡,输出电压在两者之间产生较大波动。更加适合对输出纹波要求较低的应用(如便携式或低功耗设备)。
总结:
- PWM输出仍是最平稳的,纹波波动最小;
- 突发模式输出波动最大,这是避免开关损耗换取效率的代价;
- PFM和PSM的输出波动介于两者之间。
综合排序(效率和纹波综合平衡)
如果对效率和输出纹波进行综合考虑,轻载/空载时最优总是依赖具体应用场景:
- 效率优先(功耗敏感的应用,如 IoT、便携设备):突发模式 > PSM > PFM > PWM
- 纹波优先(要求高稳定输出,如通信设备、工业控制):PWM > PFM > PSM > 突发模式
- 兼顾效率和纹波的平衡(常规边缘设备用电系统):PFM > PSM > PWM > 突发模式
总结比较表:
- 如果目标是最高效率,选择突发模式(最佳于超轻载或空载场景),其次是PSM
- 如果目标是输出纹波最小,选择PWM
- 如果目标是找到效率和输出纹波的平衡点,优先选择PFM或PSM
- 模式选择应根据具体应用场景和设计目标权衡
DCDC工作模式
在经典控制理论中,我们认为对于线性时不变系统,一个稳定系统的响应会趋于一个稳定不变的值,并一直保持下去。但是在DCDC开关电路中,由于系统工作在一定的时钟频率下,因此系统输出将不再是一个稳定不变的值,而是一个随时钟频率而周期变化的量。在现代控制理论中,我们将这种随周期变化的稳态输出,称为李雅普诺夫稳定,也就是范围稳定。通俗来讲,假设在一个DCDC电路中,开关导通阶段的电感电流增量恰好等于开关关断阶段的电感电流减量,也就是说达到了伏秒平衡条件,那么即使重复无数次相同的过程,每次都能得到相同的结果,就称此电路达到了稳态。
实际上,如果借用李雅普诺夫第二法来看,开关电源系统的稳定性可以通过电感储能或电容储能在一周期内保持平衡来判断其系统是否稳定。即电感的磁链平衡(伏秒平衡)和电容的电荷平衡(安秒平衡)。
因此,我们根据电感电流的运行情况将DCDC工作模式分为四种情况:
- 在一个开关周期内电感电流始终大于零,称为连续导通模式(CCM)。
- 在一个开关周期内电感电流出现断流情况,称为断续导通模式(DCM)。
- 在一个开关周期内电感电流最小值刚好为零,介于DCM和CCM两者之间的临界导通模式(BCM)。
- 在同步拓扑结构的DCDC中,由于低边管的存在,使得电感电流能够反向,因此还存在一种模式称其为强迫连续导通模式,即FCCM模式。
CCM、DCM和BCM三种不同工作模式对比如下:

DCDC转换器通常工作在CCM模式,CCM是DCDC转换器最常见的工作模式。
连续导通模式CCM
CCM(Continuous Conduction Mode,连续导通模式)是指在一个开关周期内,电感电流从不会降到0。这意味着电感从不“复位”,功率管闭合时,线圈中仍有电流流过。工作于CCM模式下的波形如图:

CCM不仅限于用于BUCK,还可以用于其他类型的开关电源,如Boost和Buck-Boost变换器。
CCM工作状态
一个开关周期内,电感内的电流始终大于0,电感在DCDC整个工作周期中一直处于充电放电状态;即使DCDC的功率开关管断开时(Toff),电感中一直有电流流过。

功率开关管闭合时(Ton),电感中电流以一定的速率上升;功率开关管断开时(Toff),电感中电流以一定的速率下降。同步DCDC忽略开关压降时,满足下列:

CCM工作模式下,纹波电流小于2倍的输出电流

CCM降压变化器的特点
- D限定在小于1,降压变换器的输出电压始终小于输入电压。
- 如果忽略各种欧姆损耗, 变换系数M与负载电流无关。
- 通过变化占空比D,可以控制输出电压。
- 降压变换器工作于CCM,会带来附加损耗。因为续流二极管反向恢复电荷需要时间来消耗,这对于功率开关管而言,是附加的损耗负担。
- 输出没有脉冲纹波,但是有脉冲输入电流。
CCM优点和缺点
优点:
- 高稳定性:CCM模式提供更稳定的输出电压,适用于对电压稳定性要求较高的场合
- 低纹波电流:电感电流的连续性降低了输出纹波电流,减少了电磁干扰
- 适应重负载:在重负载条件下,CCM模式能够保持较高的转换效率,适合功率较大的应用
缺点:
- 轻负载损耗大:在轻负载时,由于电感电流仍然连续,会导致不必要的能量消耗和效率降低
为什么CCM在轻载下损耗较大
- 轻载下,电感上一直有电流流过,电感有一定的直流阻抗ESR,因此电感上有一定的损耗;DCM相比,电感损耗较大;
- 轻载下,频率于重载时是一样的,开关损耗不变的;与BCM相比,开关损耗较大;
断续导通模式DCM
DCM(Discontinuous Conduction Mode,断续导通模式)则是在一个开关周期内,电感电流会降到0。这意味着电感被适当地“复位”,功率管闭合时,电感电流为零。
工作于DCM模式下的波形如图

DCM工作状态
一个开关周期内,电感电流总会到0;功率开关管闭合时(Ton),电感中电流以一定的速率上升;功率开关管断开时(Toff),电感中电流以一定的速率下降,电感中电流变为0后维持电感中电流量为0直到此开关周期结束;在下一周期开始时,DCDC功率开关管才会重新闭合,电感重新开始充电。

由于每个周期中电感都会有一段时间电流为0,即使忽略开关压降时,也无法满足下列:

DCM工作模式下,纹波电流大于2倍的输出电流:

DCM降压变换器的特点
- 传递系数M依赖于负载电流,M在负载电流低时较大,且输出电流的纹波比CCM大
- 对于想通的占空比,DCM下的传递系数M比CCM大在负载电流低工作于深度DCM,M容易达到1。
- 在电感电流为0时,可能会产生振荡现象。
DCM优点和缺点
- 优点:在轻载模式下,频率较低且存在电感为0的时刻,开关损耗与电感直流阻抗损耗都较小,效率较高;
- 缺点:纹波较大,稳定性差;输出电压波动大;电磁干扰较大;
在电感电流为0时,SW的波形为什么会出现震荡
DCM工作模式下,当电感电流为0但一个开关周期仍为结束时,控制器依然会断开两个NMOS管,此时,SW未连接到Vin或GND,处于浮动的状态,DCDC等到下一个周期开始后才会重新闭合功率管为电感充电。
电感电流降为0的瞬间,NMOS管(下管)体二极管反向截止,产生反向电流;由于NMOS管存在寄生电容,走线中存在一定寄生电感,二者一起构成LC振荡器;二极管反向电流构成的能量在LC在振荡器中不断震荡且逐渐消耗变弱,直到下一个周期重新开始。
CCM与DCM比较
- 工作于DCM模式,能降低功耗的,DCM模式的转换效率更高些,属于能量完全转换;
- 工作于DCM模式,输出电流的纹波比CCM大;
- 工作于DCM模式,在电感电流为0的时候,会产生振荡现象;
- 工作于CCM模式,输出电压与负载电流无关,当工作于DCM模式,输出电压受负载影响,为了控制电压恒定,占空比必须随着负载电流的变化而变化。
临界导通模式BCM
BCM(Boundary Conduction Mode,临界导通模式)是CCM和DCM之间的过渡模式,是一种理想模式,并不常使用。
BCM工作状态
DCDC控制器监控电感中的电流量,一旦检测到电感中的电流为0时,DCDC功率开关管立即闭合,开始重新给电感进行充电;即DCDC控制器通过电感电流量为0来激活开关;

从上图中可以看到,DCDC的周期是可变的;功率开关管闭合时(Ton),电感中电流以一定的速率上升;功率开关管断开时(Toff),电感中电流以一定的速率下降(下降速率随负载电流的大小而变化);同步DCDC忽略开关压降时,满足下列:

BCM工作模式下,纹波电流等于2倍的输出电流;

BCM的特点
BCM模式的特点是开关频率可变,适用于需要频率调节的应用场景。
BCM优点和缺点
优点:
- 高效率:BCM模式开关频率随负载变化而变化,可以适应不同的负载,能够在不同负载条件下保持较高的转换效率,特别是在负载变化较大的场合
- 低损耗:由于每个周期结束时电感电流归零,减少了不必要的能量损耗,不同负载下损耗较低
缺点:
- 控制复杂:实现BCM模式需要复杂的控制算法和实时监测系统,来检测DCDC电感中的电流量,增加了设计难度和成本
- 频率变化:由于BCM是可变频率系统,可能对滤波电路设计提出更高的要求
强制连续导通模式FCCM
FCCM (Force Continuous Conduction Mode),强制连续导通模式:在异步拓扑结构的DCDC中,低边管普遍使用二极管,可防止电感电流在轻载时出现反向。但在同步拓扑DCDC中,二极管被MOSFET替代,低边管MOSFET导通时,电感电流将会出现反向的情况,反向电流由电容提供,负载可保持不变。即允许负电流存在,在轻载情况下,输出电流减小时,变换器就不会切换到DCM模式,而是转换到强迫连续导通模式(FCCM)。如下图所示。

FCCM优点和缺点
优点:
- 高稳定性:FCCM模式提供更稳定的输出电压,适用于对电压稳定性要求较高的场合
- 快速响应:由于电感中一直有电流,对负载变化的动态响应较快,纹波较小
- 固定频率:工作频率固定,便于设计滤波器和减少电磁干扰,同时频率通常设定在超出人耳听觉范围,避免噪声问题
缺点:
- 轻载损耗大:在轻载时,由于电感电流仍然强制连续,会导致不必要的能量消耗和效率降低
- 可能引起发热:由于电感电流双向流动,整流MOSFET具有双向导通性,可能会产生额外的热效应
如何从CCM切换到DCM
(1)降低负载电流。
(2)降低电感值L。
示例介绍
目前使用的大部分DCDC都是同步的,这里非同步DCDC来介绍。下面以TPS40200(非同步降压DCDC)为例。


仿真结果如上图所示,从图中可以看出:
- D3就是非同步转换器中特有的肖特基二极管。
- 该电路具有缓启动功能。
- VIN = 8V,VOUT = 3.3V,负载电阻R_L = 3.3Ω。
下图为TPS40200输出电压V(VO)和负载电流I(RL2),从仿真结果可以看出,负载电流I(RL2)总是>0,因此工作在CCM模式。

从上面的仿真结果可以看出,电感电压V(OUT)波形为斩波,电感电流I(RL2)波形为斜波,在电感电压V(OUT)从低值-0.34V突变到高值7.94V,因为电感电流不会突变,所以电流会逐渐上升;在电感电压V(OUT)从高值7.94V突变到低值-0.34V,因为电感电流不会突变,所以电流会逐渐下降。所以电感电流波形如下图所示。

TPS40200电感电压波形如下图

上图中,可以验证,电流上升时的斜率 = 开关闭合时电感两端电压/电感 = VON/L = (7.93V - 3.3V)/33uH = 140 V/ms;电流下降时的斜率 = 开关关闭时电感两端电压/电感 =VOFF/L = (-0.343V - 3.3V)/L = -3.643V/33uH = -110 V/ms。
可以看出,电感两端的电压是不同的,靠近开关的电压波形是斩波,此处即是交换节点,靠近负载的电压为输出电压值。
交换节点处不要铺设太多的铜,否则会形成有效的电场天线,向四周喷射放射状的射频干扰。经过测量可知开关频率 = 300KHz。
切换测试
以下通过将负载电阻从3.3Ω改成50Ω,测到的电感电流波形如下图所示

对比上一小节电感电流波形可以看出当负载电阻增大时,电感电流波形下移了,选择合适的负载电阻可使工作模式从CCM切换到DCM。
此外降低电感值,也可切换非同步DCDC的工作模式,将电感值设置为3.3uH,负载电阻设置为3.3Ω,仿真结果如下图所示。

对比可以看出,降低电感值,可以使非同步DCDC的工作模式由CCM切换到DCM,精心挑选电感值,可使工作模式切换为BCM。
电感电流交流纹波与电感值的关系
电感值越大,电感电流交流纹波△I越小,电感电流波形(电感值L = 33uH)

电感电流波形(电感值L = 330uH)

可以看出电感值越大,交流纹波越小。但是电感值越大,尺寸也会越大,这是个问题。
电感饱和意味着什么
电感饱和的原因是:电感电流的瞬时值与磁芯内部的磁场强度成正比,因此当电流达到某一值导致电感内部的磁场强度超过了某一安全值,电感就会饱和,当电感饱和后,如果电流继续增大就会又不可控的浪涌电流流过开关管。
电感饱和意味着L趋于0,根据V=Ldi/dt可知,△I=V/L,当L=0,△I趋于无穷大,会危及开关管。
因此,将电感值设置为1pH,得到的仿真结果如下。

当将电感值设置为1pH时,可以看出,电感电流可超过20A,有可能损坏开关管,因此在电感选型时,感值宁可大一些也不可小。
DCDC调制模式和工作模式关系
在电力电子和开关电源的领域,PWM、PFM和PSM等是控制模式,是描述控制策略。而CCM和DCM等是工作模式,是描述电路的运行状态。两者属于不同层级的概念,没有直接对应关系,可以交叉配合使用。
PFM控制下的工作模式
- PFM+DCM(常见)
轻负载时,PFM多用于配合DCM工作模式,通过调整频率降低开关损耗,避免不必要的导通损耗。电感电流在开关周期内断续,频率降低以减少功耗。典型应用:待机电源、低功耗设备。 - PFM+CCM(较罕见)
PFM模式可以在重负载时使用,结合CCM运行,但这通常会导致频率调制带来的EMI问题。该组合较少见,因为频率变化对CCM的功率传输效率提升有限。
PSM控制下的工作模式
- PSM+CCM(常见)
用于大功率设备,通过调整相位移量控制功率大小,在CCM模式下工作时效率较高,因为整个周期内都有电流流过并且切换损耗小。典型应用:ZVS全桥/半桥、大功率DC-DC变换器。 - PSM+DCM
在轻载时,PSM模式也可以与DCM结合,适用于对功率损耗敏感的情境。尤其在大功率拓扑中,轻载时可以通过让电感电流间断来减少损耗。
PWM控制下的工作模式
- PWM+CCM(常见)
在中等和重载情况下,PWM+CCM是最常用的组合。频率固定,占空比调整方便控制输出电压或功率。 - PWM+DCM
在轻载时切换到DCM运行,还可以保持固定频率,占空比调整输出。常见于中功率和需要稳定频率输出的场景。
实际应用中的模式切换
为适应不同工作条件,开关电源在实际设计中通常会结合不同的控制模式和工作模式,比如:
- 轻载切换到PFM+DCM
在轻载或待机功耗需求较低的情况下,控制逻辑通常会从固定频率的PWM+CCM切换到PFM+DCM,以减少开关损耗和待机功耗。 - 从正常加载PWM+CCM切换到轻载的PWM+DCM
当负载逐渐降低时,控制逻辑可能会通过降低占空比并进入DCM模式,保持效率。 - 高功率应用中PSM+CCM切换到PSM+DCM
在大功率ZVS转换器中,当负载从重载变为轻载时,控制器会调整到PSM+DCM以减少开关周期内的电流传导时长,减轻损耗。
模式选择的设计考量
设计选择PFM、PSM、CCM或DCM的组合时,需综合考量以下因素:
- 效率需求
轻载时:PFM+DCM 提高效率。重载时:PSM/PWM+CCM提供高性能。 - 开关损耗
PFM降低频率减少开关损耗,但会带来EMI问题。PSM利用软切换减少损耗。 - 负载范围
宽负载范围需要兼顾CCM和DCM工作模式的切换。 - 磁性元件设计
CCM模式电感电流连续,电感设计要求更高,但可以减少谐波。DCM模式下电感可以更小,减少器件体积。
总结
PFM/PSM是控制策略,调整的是开关电源的运行方式,通过改变频率(PFM)或相位(PSM)调节功率输出。CCM/DCM是工作状态,反映的是电感电流的导通性质,与实际负载和电路设计参数相关。它们之间没有单一绑定关系,而是根据具体应用灵活组合,以实现高效、可靠、灵活的供电。
一个简单的关系描述就是:
- PFM更适合低功耗应用(轻载),常与DCM搭配。
- PSM更适合高功率应用(重载),常与CCM搭配。
参考:
电源系列之BUCK在轻载下的工作模式
DCDC变换器轻载时三种工作模式
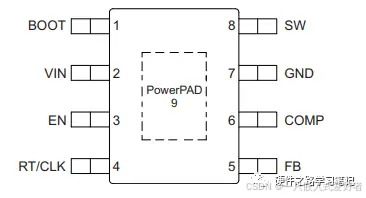
DCDC芯片中不同引脚作用
DC-DC转换器中的不同引脚各有其特定的作用,以下是主要引脚及其功能:
1、VIN(输入电压引脚):
这是DC-DC电源模块的电源输入端,通常连接到电源的正极。输入电压的范围一般在5V到35V之间,过高或过低的电压都会影响模块的正常工作
2、EN/ON#OFF(使能引脚):
这个引脚用于控制DC-DC电源模块是否输出电压。当EN引脚被拉高时,模块输出电压;当EN引脚被拉低时,模块不输出电压,在大部分引用中是接电阻到输入脚来使能IC。
3、FB/VSENSE(反馈引脚):
FB脚用于形成负反馈回路,调节输出电压。通过调整FB脚的电压,可以改变输出电压的大小。通常,FB脚连接到输出电压分压电路,反馈回芯片内部,从而调整PWM比较器的输入
4、COMP(误差放大器输出和PWM比较器的输入):
这个引脚用于误差放大器的输出和PWM比较器的输入,一般串联阻容用作频率补偿,确保电源IC在负载变化时保持稳定,根据原理不同可能接地或接FB脚。

为何要做频率补偿?电源IC在工作过程中,可能遇到负载突然变大或者变小的情况,这种情况下对电源IC的动态性能要求很高,否则可能会出现电压突降或者过冲的情况。如果遇到输出电压在负载突变时不稳定的情况,应当调整COMP脚链接的容阻值。
5、BOOT/VBST(高侧FET栅极驱动器的升压电容器引脚):
BOOT脚连接到高侧FET栅极驱动器的升压电容器引脚,通常使用一个0.1uF电容连接到SW脚,以提高栅极驱动电压。这有助于在高侧NMOS开通时,确保栅极电压高于源极电压。
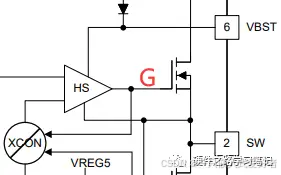
如图所示,要想使高侧NMOS开通,则NMOS栅极G点电压应该比NMOS源极SW点电压高,但在SW脚电压接近输入电压VIN的情况下,VG无法高于SW电压,因此需要VBST电容,利用电容电压不可突变的特性,将运放HS的供电电压提高到大于大于SW电压即大于输入电压VIN,以此使G点电压大于SW。
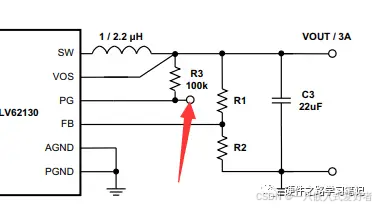
6、SW/PH(开关引脚):
SW脚是输出电压引脚,相当于一个开关,不断打开和关闭以产生方波。通过调节SW脚的电压,可以控制输出电压的大小。SW脚一般连接电感,因为此引脚在DCDC内部也连接MOS管开关,因此SW是开关Switch的简称。
7、PG/PGOOD(电源状态指示脚):
这个引脚用于指示电源状态,一般是开漏输出,需要连接上拉电阻,此引脚可以接LED指示灯,也可以接MCU的IO。当电源输出正常时,输出高电平;当电源输出异常时,输出低电平。
8、RT/CLK/SYNC(内部振荡器频率控制引脚):
RT是内部振荡器频率控制引脚,通常连接一个电阻到地来控制DC-DC的工作频率。CLK(时钟)和SYNC(同步)是外部时钟输入引脚,此引脚连接外部时钟源来控制DCDC工作频率,外部时钟输入的好处是可以用于用同一个时钟同步多个DCDC模块的工作频率,减少总输入电流纹波
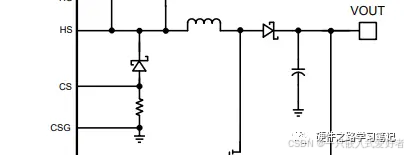
9、CS/CSG:
C是指Current-电流,S是指传感器-Sensor,G是GND,一般CS与CSG之间连接一个分流电阻来起到读取电流的作用,一般可调限流保护的IC会有这两个引脚。
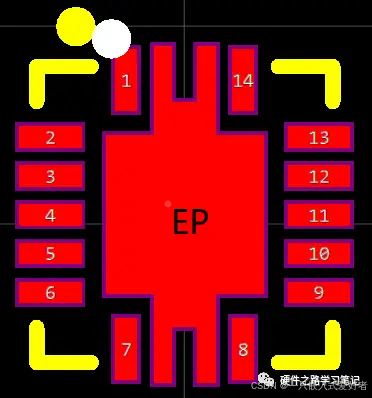
10、EP/PAD:
EP脚是Exposed Thermal PAD脚的简称,封装的散热焊盘脚,需要接地有利于散热。
11、MODE:
DCDC芯片的MODE引脚主要用于设置芯片的工作模式,包括突发模式和连续模式。突发模式适用于负载较轻的场合,而连续模式适用于重负载场合。MODE引脚的工作原理是通过电压阈值来控制工作模式:当MODE引脚电压在1.38V到2.22V之间时,芯片工作在CCM模式的hiccup模式;当MODE引脚电压在2.6V到供电电压之间时,CCM模式的hiccup模式被禁止。此外有的芯片可以调整MODE引脚对地电阻来设置开关频率,CCM/DCM模式选项和内部LDO输出。
Hic-cup SCP(打嗝式短路保护)是一种电源保护模式,主要用于防止电源在短路情况下过度响应或损坏。具体来说,Hic-cup SCP通过在检测到短路时暂时关闭输出,然后短暂重新启动输出,以避免持续的大电流冲击,从而保护电源和负载。
Hic-cup SCP的工作原理是当电源检测到短路时,Hic-cup SCP会暂时关闭输出,然后经过一段时间后重新启动输出。这个过程会重复进行,直到短路条件解除或电源确定无法恢复输出。这种周期性的开关操作类似于“打嗝”的动作,因此得名Hic-cup。
12、SS:
DCDC芯片的SS引脚主要用于实现软启动功能。通过外接电容,SS引脚可以控制DCDC启动时的爬升速度,从而避免启动瞬间的大电流冲击,保护电路和设备。
SS引脚的工作原理为,当DCDC芯片上电时,SS引脚通过外接的电容进行充电。充电过程由内部控制电路控制,使得DCDC的输出电压缓慢上升,而不是瞬间达到额定电压。这样可以减少启动时的电流冲击,保护电路中的元器件,特别是大电容和负载。
在实际应用中,合理设置SS引脚的外接电容值非常重要。电容的充电时间决定了启动过程的快慢,电容值越大,启动时间越长;电容值越小,启动时间越短。设计时需要根据具体应用的需求来选择合适的电容值,以达到最佳的启动效果和系统稳定性。
DC-DC自举电容(BOOT)几个问题
连接在芯片的SW和boot管脚之间,这个电容称之为自举电容:
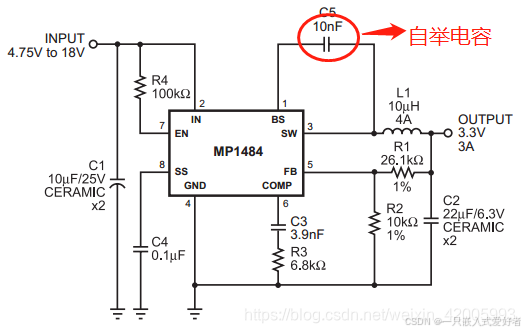
以MPS的buck芯片MP1484为例。规格书中芯片的BS管脚说明如下:

在BS和SW之间接一个0.01uf的电容,用来给上管供电。这里的上管自然是内部开关MOS管的上管了。
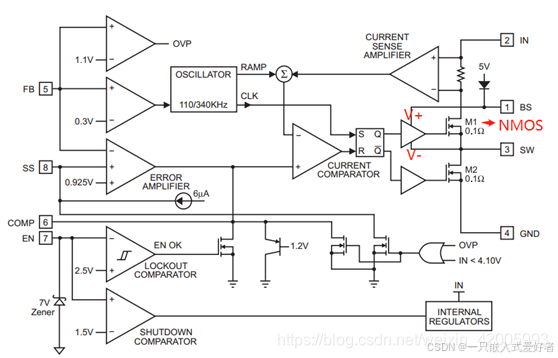
上图是MP1484芯片内部图。可以看到开关管是2个NMOS管。
DC-DC在工作时,SW管脚电压在M2导通时是接GND的,在M2断开时是接VIN,SW电压与电源输入VIN相同。上管M1的Vgs由驱动器控制,我们知道,要想Vgs要能够导通,Vgs必须要大于M1的导通门限Vgsth。因为驱动器的电源负端在M2断开时电压已经是与源输入Vin相同了,所以驱动器的供电必须大于Vin。
在M2导通时,SW接到了GND,自举电容一端也接到了GND,5V通过二极管给上管M1供电,并且给自举电容充电。在M2由导通变为关闭的时,SW由GND变为VIN,自举电容两端的电压不能突变,因此Boot端被升到大于Vin电压,给驱动器进行供电。因为SW接地的时候电容两端的压差是5V,如果M2关闭,SW一个引脚接VIN,由于电容两端电压不能突变,那么另一端的电压就是5V+Vin,这样才能维持5V的压差。
注意自举电容是维持上管的导通,而不是打开上管;在M2关闭的瞬间,M1已经打开,如果没有自举电容,打开状态不能维持,自举电容存在的能量应能满足整个M2关闭时提供的能量以及为下一次启动提供能量。BOOST电容耐压的选择,主要看内部下管导通时候,给自举电容充电的电源电压是多少,例如图中是5V,选择10V/16V耐压均可,保险起见可以选大于Vin的。
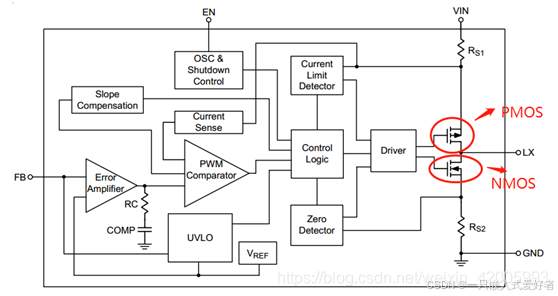
为什么有的buck有自举电容,有的buck没有自举电容?这个问题跟Buck芯片内部的使用的管子有关系,如果内部2个开关管都是NMOS管,那么是需要自举电容的。但是有的BUCK芯片上管是PMOS管,不需要产生比Vin还高的电压,也就不需要boot电容。如下图为某buck芯片的内部框图
电压纹波和噪声
噪声和纹波的理解
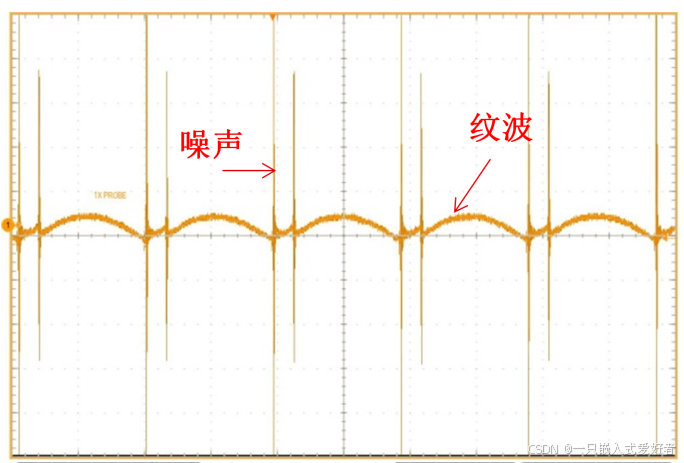
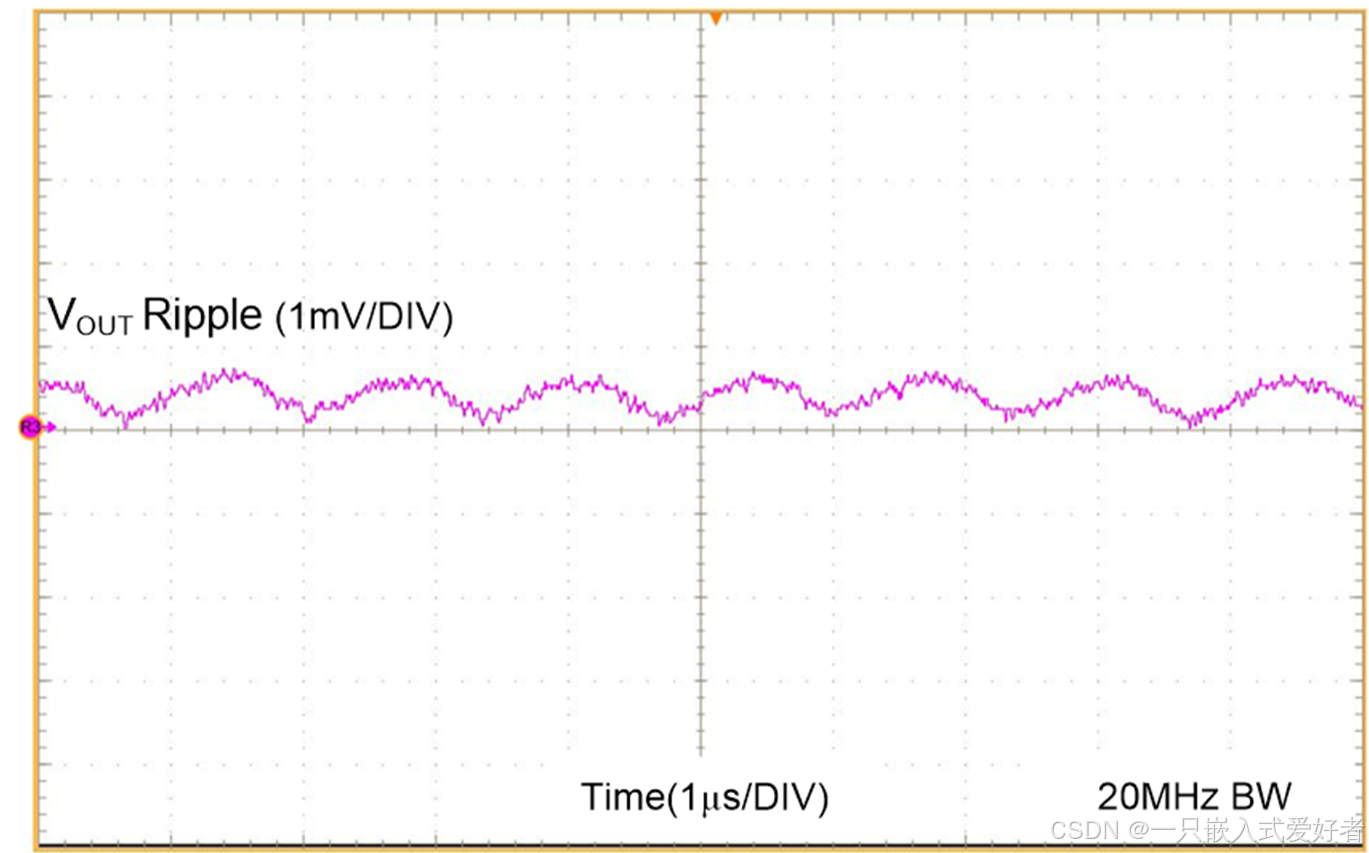
所有DC-DC转换器都有输出纹波和噪声。纹波分量是由于输出滤波电容的充放电而产生的,根据不同的拓扑一般它的频率等于工作频率或工作频率的2倍。
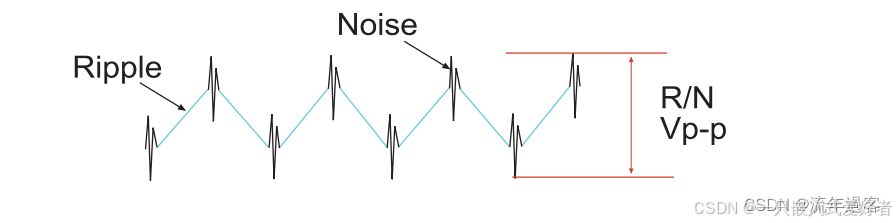
叠加在纹波之上的是开关尖峰(噪声),它是由寄生效应在每次开关状态改变时产生的。它出现在每个纹波的波峰或者波谷。开关瞬变的频率通常要比波纹频率高好几个数量级,在MHz的区域。这两者组合形成了输出端的波纹噪音图,通常以毫伏左右的峰峰值来衡量(mVp-p)。
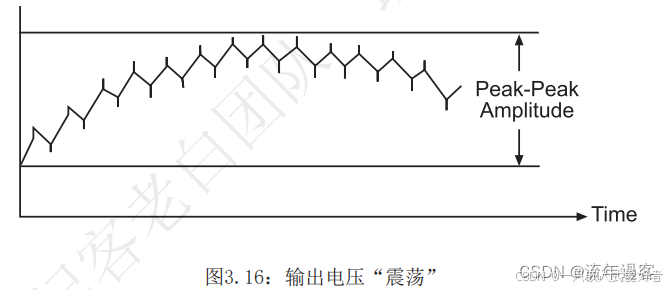
在输出纹波/噪声波形上还叠加了一个由输出稳压电路产生的非常缓慢的震荡。当负载和输入电压恒定时,输出电压将会在一个公差带内以一个几Hz的频率蜿蜒延伸。“震荡”效果是来自于稳压电路的滞后作用,通常规格书的纹波/噪声图会忽略它,因为输出电压精度已经考虑这个问题,因此不再在纹波/噪声部分累述。
一般人们倾向于添加输出电容以减小输出波纹,虽然这样做可以稍稍减小峰峰值,但是要完全滤除纹波是不可能的。事实上,在使用周期控制的转换器中,一些输出波纹对于正确的稳压操作是完全必要的。
输出电压纹波来源和抑制
输出电压纹波的产生
以Buck电路为例,由于寄生参数的影响,实际Buck电路的输出电压并非是稳定干净的直流电压,而是在直流电压上叠加了输出电压纹波和噪声,如图所示
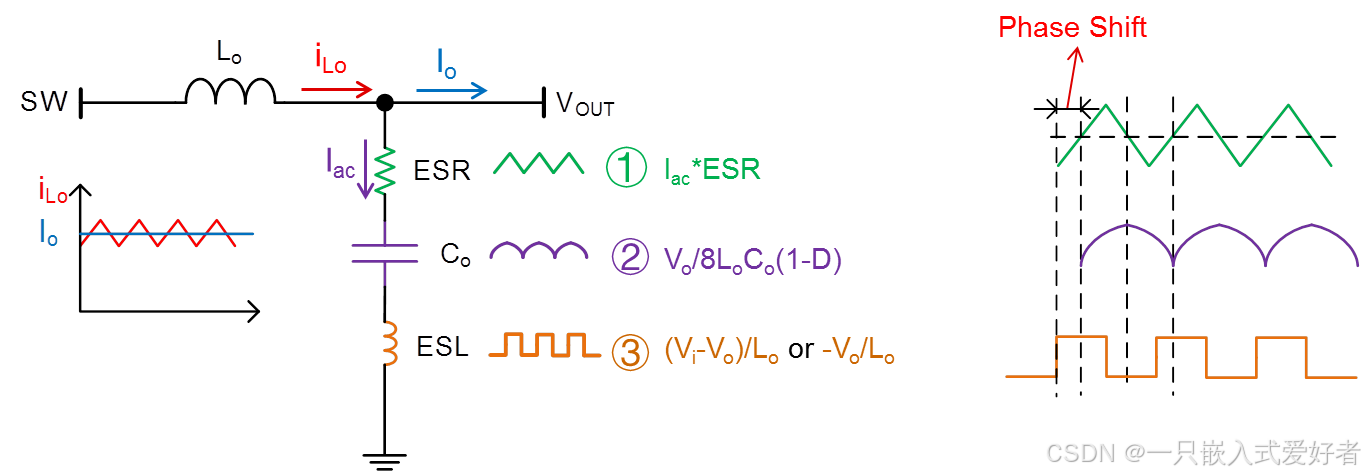
实际输出电压纹波由电感电流与输出阻抗决定,由三部分组成,输出电压纹波的组成如下图所示。
- 电感电流纹波通过输出电容的寄生电阻ESR形成的压降
- 输出电容的充放电
- 寄生电感引起的电压突变
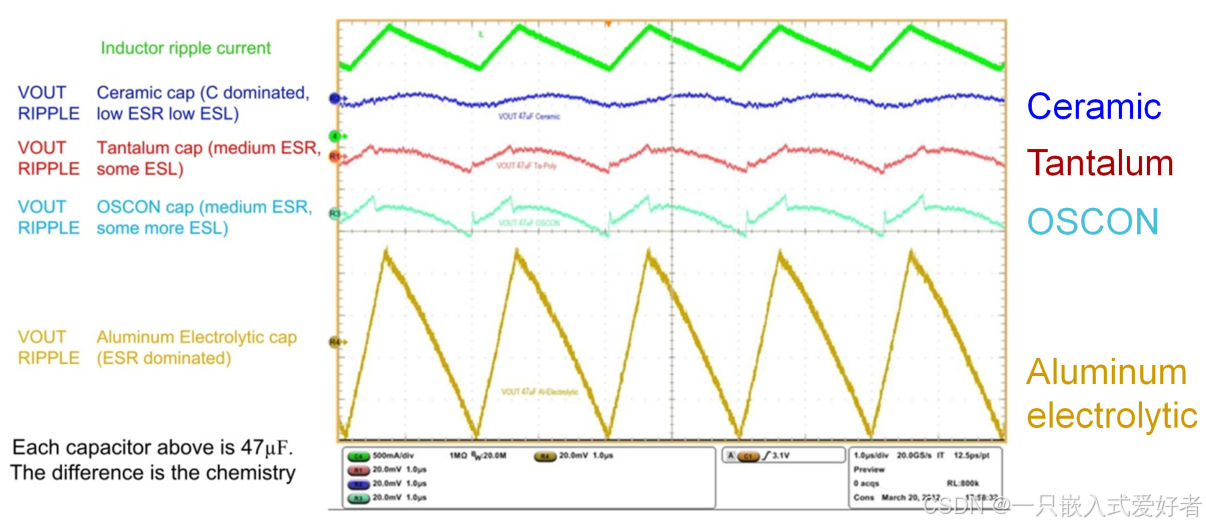
不同类型的输出电容,寄生参数的大小不同,三部分纹波所占的比例也有所不同。因此,使用不同类型的输出电容会得到不同波形的电压纹波。如下图所示,电解电容的ESR较大,纹波由ESR主导,波形与电感电流纹波形状类似。陶瓷电容的ESR和ESL都很小,主要由电容的充放电主导,纹波类似电容的充放电曲线。OSCON电容三者的影响都体现在纹波中。
输出电压纹波的测量
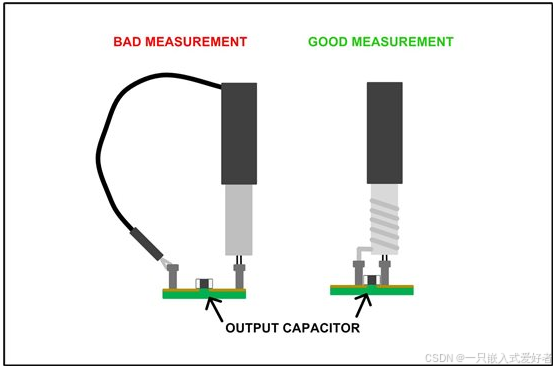
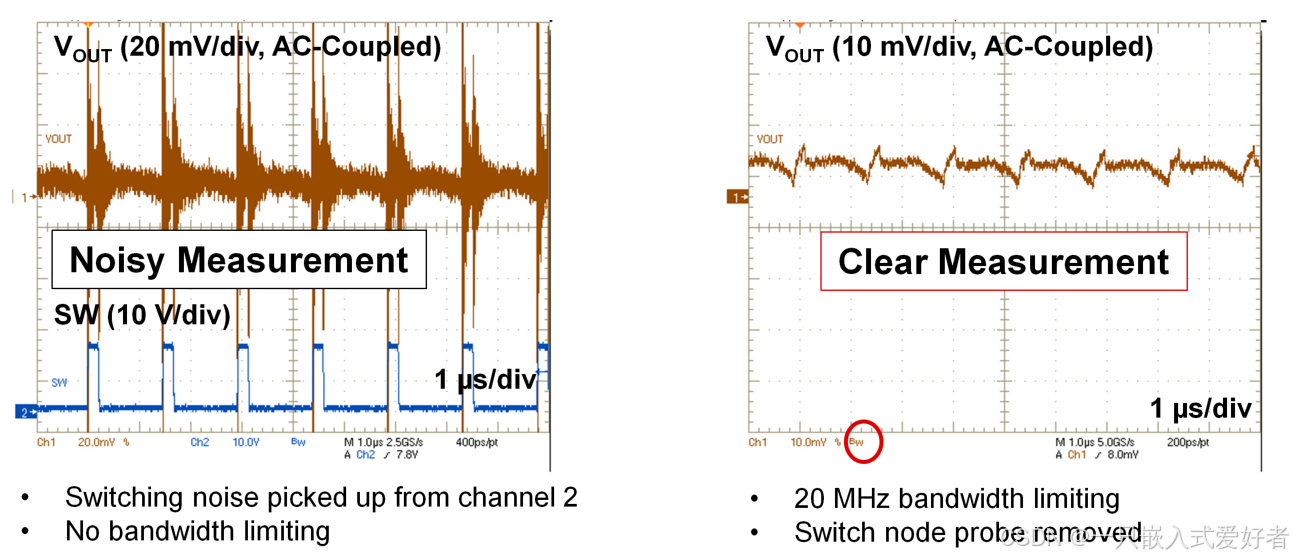
在测量输出电压纹波时,要注意如下几点,正确方式如下图所示:
- 保证接地环路尽可能小,建议使用接地环
- 探头应靠近电容两侧
- 避免同时使用示波器其他通道测试其他点位的波形
- 如果只关注开关频率分量纹波,建议打开示波器带宽限制
如下图所示,左侧波形同时测量开关节点和输出电压纹波,带宽限制关闭。可以看到,输出电压纹波中的噪声较大,影响纹波的测量。
输出电压纹波的抑制
由以上分析可知,输出电压纹波由电感纹波电流和输出电容阻抗决定(式1)。

因此,要降低输出电压纹波可以通过降低电感电流纹波或者降低输出电容阻抗。 当输入输出电压和负载一定时,电感电流的纹波跟开关频率和电感量成反比。增加电感量或者开关频率可以有效降低输出电压的纹波,但开关频率和电感往往受到电路效率和体积等的限制。
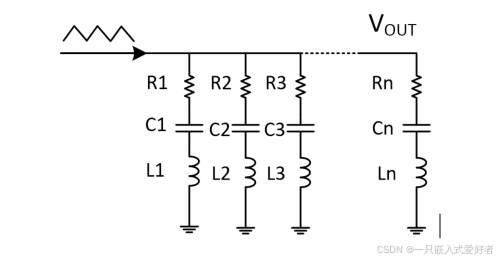
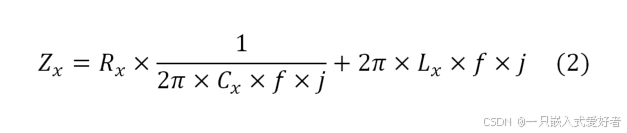
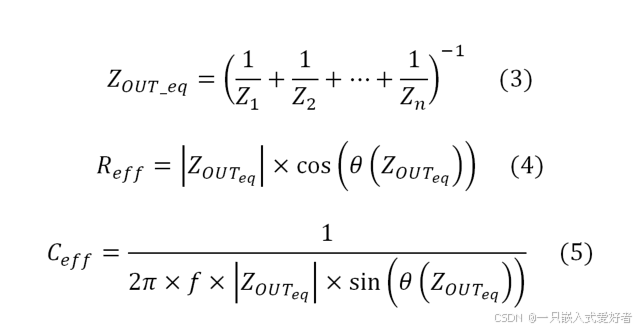
当开关频率和电感值一定时, 抑制纹波电压最有效的方式是减小输出电容在开关频率处的输出阻抗。在实际应用场景中,通常会并联多种不同的输出电容来获得足够的容量并降低输出电压纹波,如图6所示。由式(2)-(5)可以计算得到输出电容的总阻抗以及等效的电阻和电容。若已知Buck电路的开关频率,通过式(3)可得到开关频率处的阻抗,也就可以得到输出电压纹波。但是,当输出电容数量较多时,计算会变得很复杂。简单有效的方式可以借助Excel 工具,如下图所示。
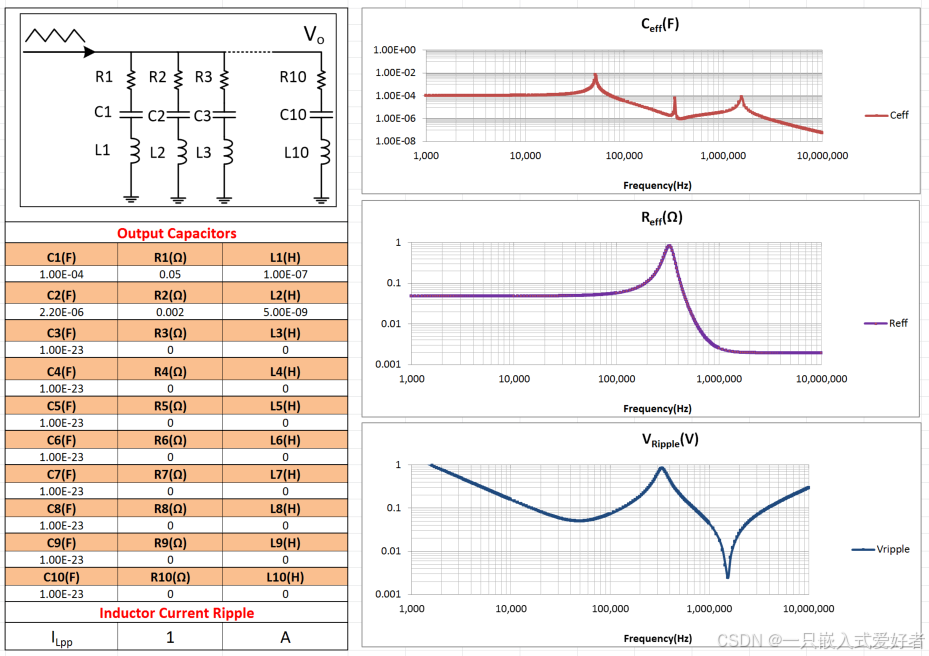
若选择合适的电容仍然无法满足纹波的要求,可以增加第二级LC滤波器来进一步降低输出电压纹波,如下图所示。
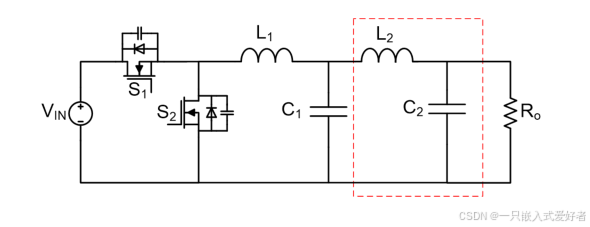
第二级LC滤波器提供额外的增益衰减,但同时高品质因素Q值也会导致相位裕度降低,甚至导致环路稳定性问题,Buck两级滤波波特图如下图所示。
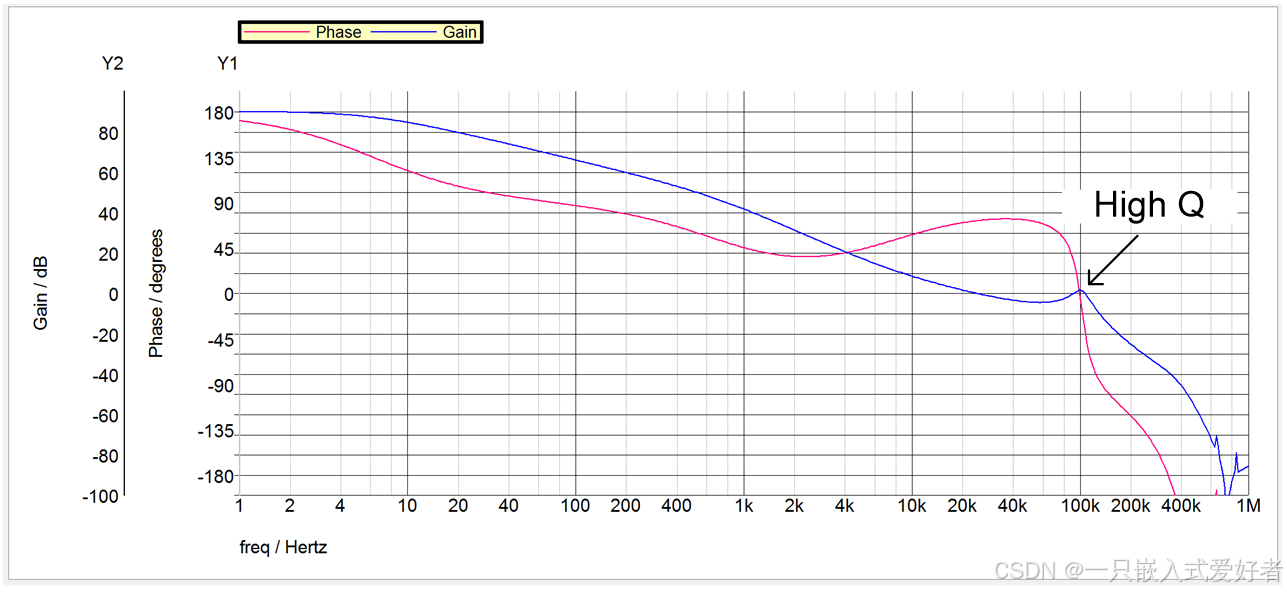
为保证环路稳定,可以在L2两端增加damp电阻,降低Q值。LMZM23601 两级滤波如下图所示,以TI电源模块LMZ23601为例 (Vin = 24V, Vout = 5V, Fsw = 750kHz, Iout = 1A),在输出端增加160nH 电感, 3X22uF 电容, 250mΩ damp电阻,输出电压纹波<1mV。
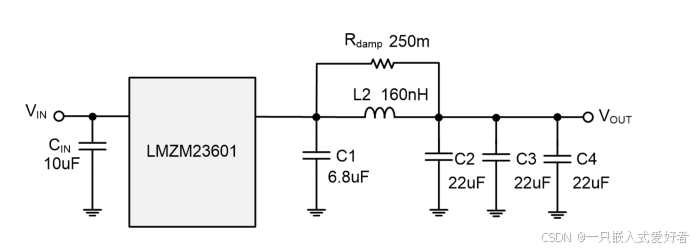
LMZ23601 两级滤波输出电压纹波如下图。
综上所述,理解输出电压纹波的形成原理,根据实际应用要求,针对性地优化电感值、开关频率以及输出电容,可有效降低输出电压纹波,满足应用需求。
最后一个更有效的降低纹波/噪声的方法是在输出电压后再添加一个线性稳压器。线性稳压器的电源纹波抑制(Power Supplly Ripple Rejection/PSRR)率是非常高的(高达70dB),因此它可以成为非常有效的波纹滤波器。
高频噪声分量的来源和抑制
输出电压噪声的产生
输出电压波形中除了开关频率分量的纹波以外,还存在高频噪声分量,如图1所示。高频噪声是如何形成的呢?主要是由电路中的寄生参数造成的。在实际电路中,PCB走线存在寄生电感和电阻,输入输出电容会引入寄生电感和电阻,两个不同电位的平面之间会形成寄生电容。以Buck电路为例,上下管切换的瞬间,输入回路中的寄生电感与开关管的输出电容谐振。因此,开关节点SW在上升和下降沿会产生高频振荡,且寄生参数越大,振荡的幅度也越大,甚至损坏开关管。该高频振荡会通过SW节点与输出VOUT之间的寄生电容耦合到输出电压,也就是输出电压中的高频噪声。
输出电压噪声的抑制
了解高频噪声的来源和耦合途径,可以帮助我们有针对性地抑制输出电压噪声。下面分别介绍如何通过噪声源和耦合途径来抑制输出电压噪声。
针对噪声源
针对噪声源,有如下几种抑制方法:
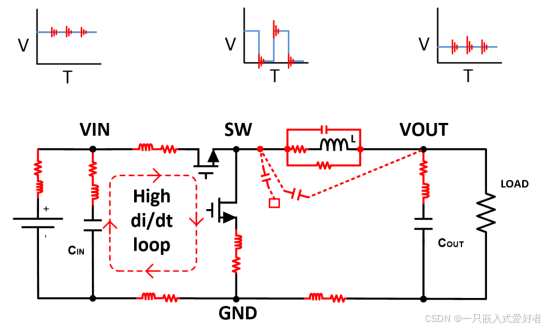
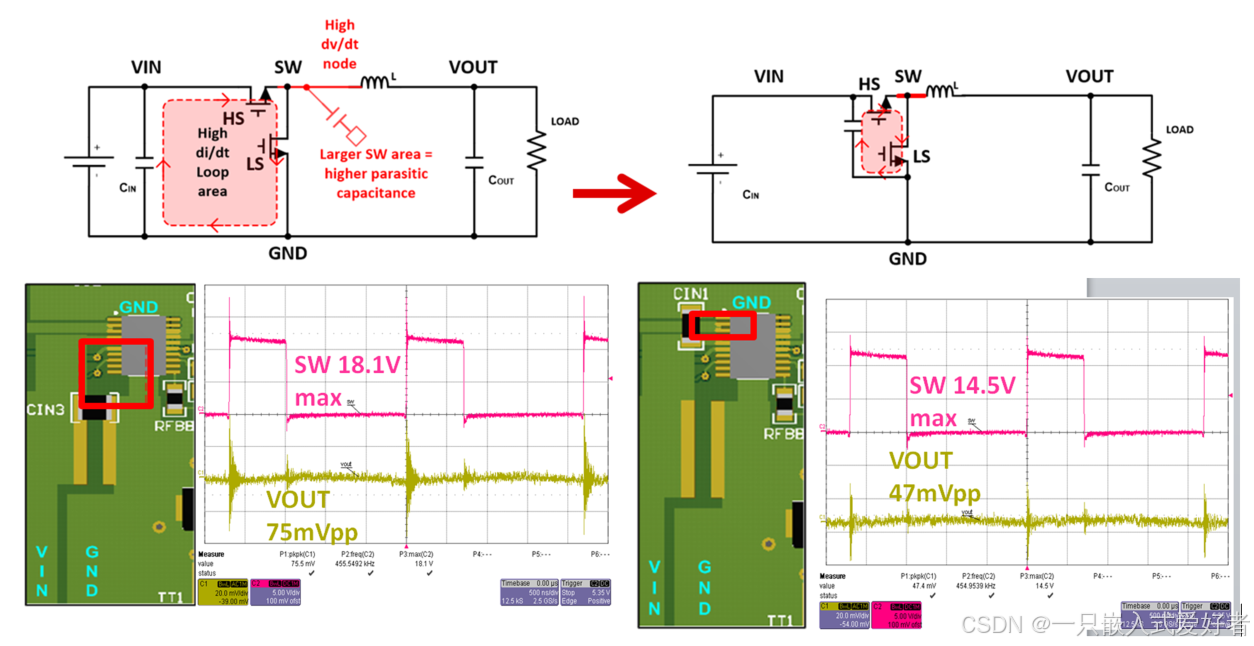
1、PCB布板时尽量减小输入高di/dt回路
Buck电路的输入回路由输入电容CIN, 上管HS和下管LS组成。 HS和LS的开关动作导致输入环路电流的非连续性,引起SW电压的振荡。 输入环路越大,振荡越严重,开关管的电压应力越大。将输入电容尽可能靠近HS和LS,保证输入环路尽最小,可有效降低开关节点SW的振荡,输入电容位置对输出电压噪声的影响如下图所示。
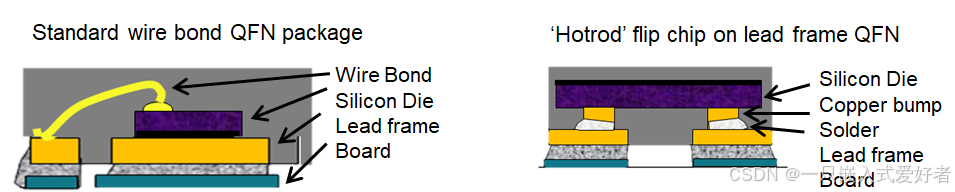
2、可以使用TI HotRod 封装产品
HotRod 封装技术将芯片内部的die倒置,通过铜柱直接连接die 和lead frame,消除了使用wire bond引入的寄生电感,减小SW节点的振荡,例如LMR33630。TI Hotrod封装技术如下图
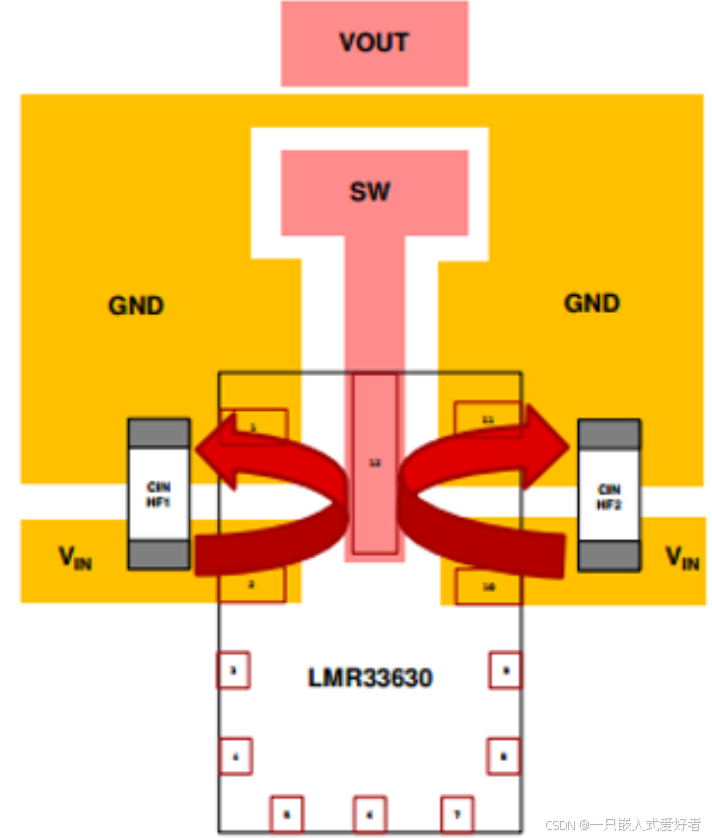
另外,LMR33630对称输入降低图如下图所示,HotRod封装有两个电源VIN引脚和两个接地GND引脚,分别位于封装的两端。这种引脚分配可以减少VIN和GND回路造成的寄生环路电感。如果在器件的两边都有对称布局的输入电容,等效寄生回路电感则会减半(两个相等的并联电感)。这可以有效地减少高的di/dt 产生的噪声,相当于高频滤波。
3、使用TI电源模块产品
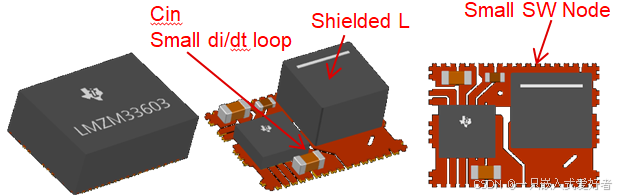
由于Layout的限制,输入电容无法无限靠近Buck 芯片。TI的电源模块产品集成高频输入电容和电感,进一步减小输入回路和SW节点的面积,降低噪声,TI电源模块产品如下图所示。
针对耦合途径
针对耦合途径,有如下几种抑制方法:
1、选择寄生电容较小的电感
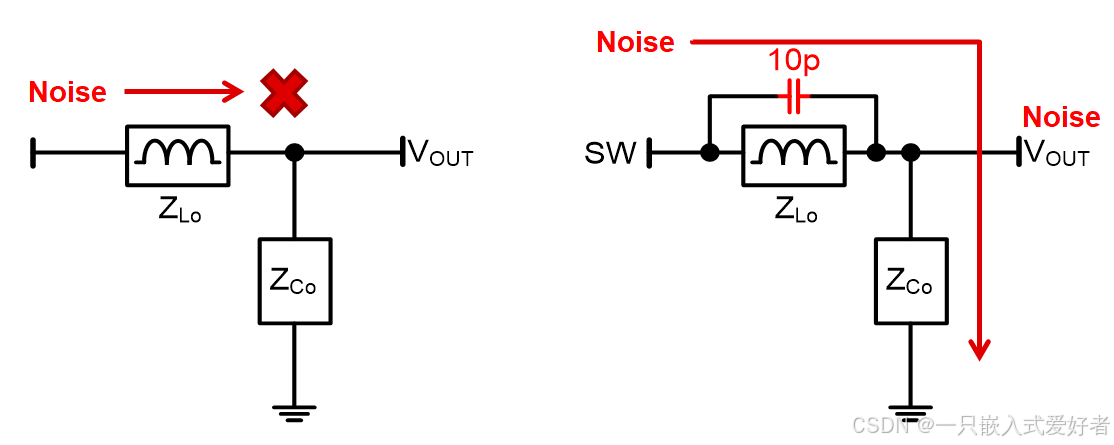
理想电感对高频噪声呈现很大的阻抗,因此输出电压中的噪声很小。但是,实际电感存在寄生电容,噪声会通过耦合电容,耦合到输出电压。因此,选择耦合电容较小的电感,在一定程度上可抑制输出电压噪声。噪声耦合途径如下图所示。
2、并联高频滤波电容
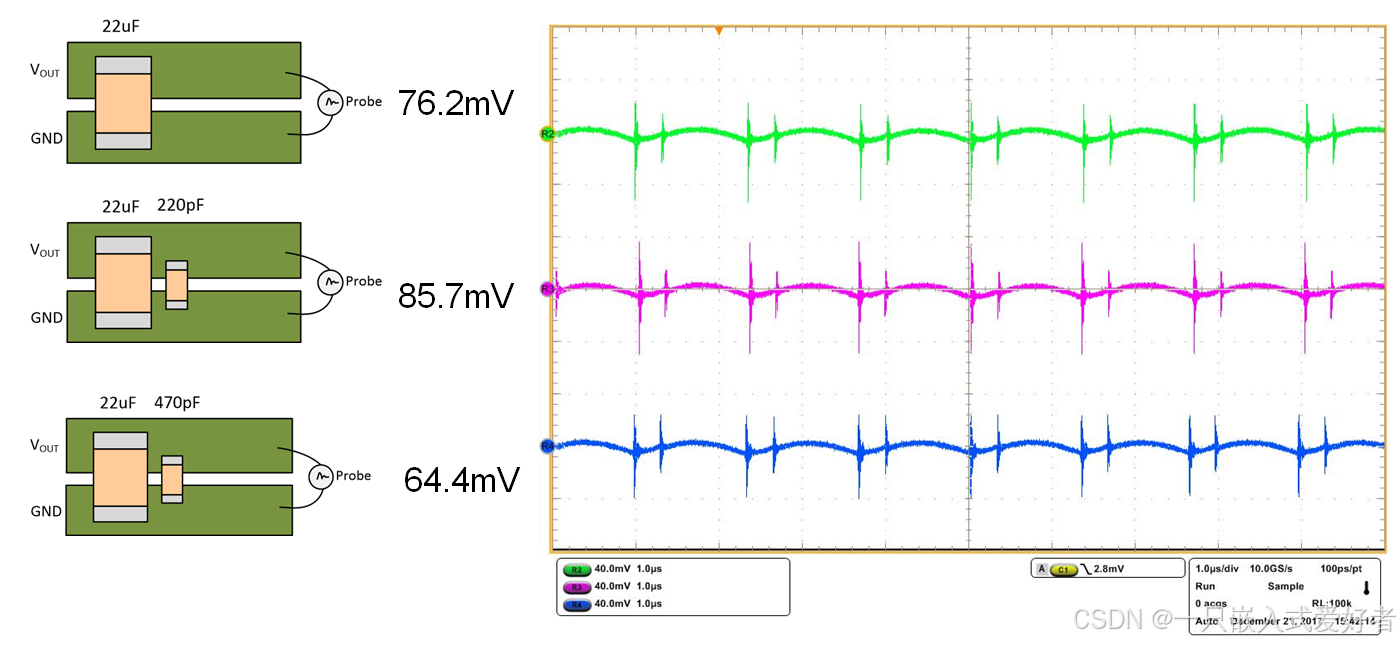
直观地理解,输出电压噪声等于SW噪声在输出电容阻抗和输出电感阻抗的分压。也就是说,输出电容在噪声频率处的阻抗越小,耦合到输出的噪声就越小。但是,多个电容并联后,输出电容的阻抗曲线会存在多个谐振点。如图7所示,增加高频电容后,在谐振点处,阻抗最小; 谐振点之前,阻抗变大; 谐振点之后,阻抗变小。因此,并非增加高频电容就一定能减小输出噪声。噪声频率位于谐振点处,输出噪声最小。输出并联高频滤波电容的阻抗特性如下图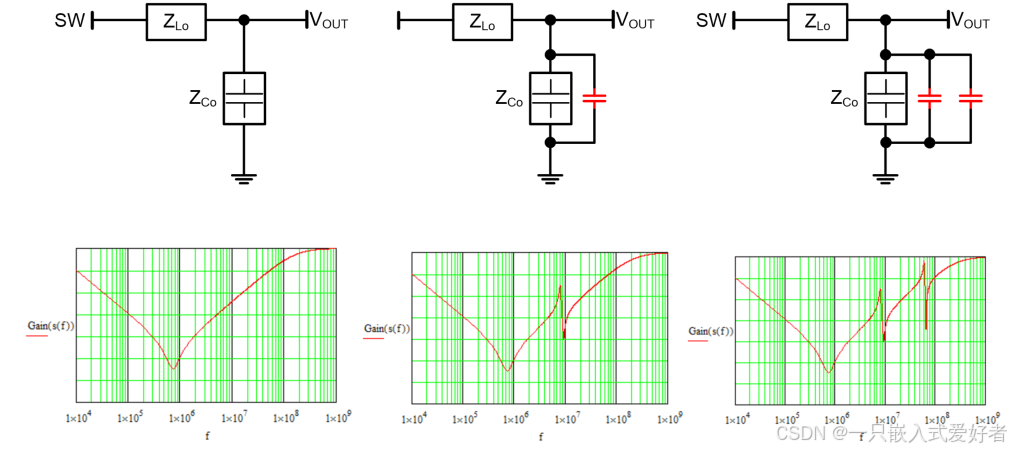
不同电容对输出电压噪声的影响如下图所示,增加220pF的电容,电压噪声反而增加了。因此,选择合适的输出电容至关重要。
综上所述,理解输出电压噪声的形成原理,根据实际应用要求,选择先进的封装技术/电源模块产品、优化PCB布局、增加滤波电容可有效降低输出电压噪声,满足应用需求。
DCDC-BUCK中电感的选型
功率电感一般分为以下四种外形(如图)。而在DC/DC升压降压电路中,电感是仅次于IC的最核心元器件。选择好的功率电感,可获得较高的转换效率。功率电感选型,一般需要参考以下几个参数:L(电感值), Isat(饱和电流),Irms (温升电流),SRF (自谐频率),DCR(直流电阻值)以及公差。对于DCR大家都知道要越小越好,因为这关系到电感的热损耗。而对SRF ,一旦超过此指标,电感就不会表现出电感特性,反而是电容特性了。
电感电流一般有2个值:
- Isat是指饱和电流,一般指饱和电流(Saturation Current)电感值下降到30%(不同厂家定义有所不同,一般为10%-30%)的电流。DCDC电路中感电流瞬间值不能超过这个。
- Irms是温升电流,也就是加电流后,电感产品自我温升温度不超过40度时的电流。DCDC电路中电感电流有效值不能超过这个。Isat和Irms谁大谁小主要取决于电感是磁芯先饱和还是先达到温度的限制,Irms可能比Isat大也可能比Isat小。
电感器饱和电流
饱和电流Isat的定义:是表示标称电感值衰减10%~30%时的偏置电流大小,不同厂商的规格存在一定差异,一般为标称电感值衰减30%时的偏置电流大小。
如果选取的电感器的饱和电流很小,甚至低于电感峰值电流IL_peak值,此时电感的感值在电感电流作用下相比于标称电感值显著降低,使得DCDC输出电压纹波显著增大,EMI性能变差,从而影响RF transceiver性能,导致芯片无法正常工作。
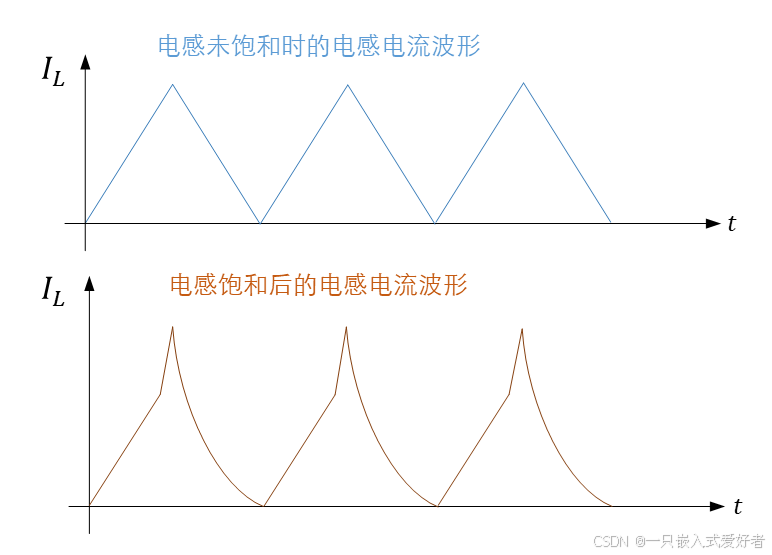
如何快速的判断所使用的电感饱和电流过小,我们可以通过电流钳抓取电感L上的电感电流,通过电感电流波形来判断电感饱和电流是否符合要求,如果我们抓取的电感电流波形是标准的三角波,则证明电感的饱和电流满足要求,如果我们抓取电感电流波形异常,出现畸形,即下图所示的非标准三角波,就证明所使用的电感的饱和电流不满足要求,需要选择饱和电流更大的电感器。
根据VBAT/L/VREG/Ton的设置参数,计算不同配置参数下的电感峰值电流,获取最大电感峰值电流,基于最大值确定电感饱和电流,一般是Isat=k*IL_peak(k=2~10)。
电感器DCR(Direct-current Resistance)
DCR表示的是电感器的直流电阻,即影响电感器的阻性损耗大小,因此对DCDC效率要求较高的场景下,我们需要选择DCR较小的电感器,降低电感器损耗,提升DCDC效率,降低整机功耗。
电感值计算公式
Lmin=(Vin-Vout)Vout/(△If*Vin) —同步BUCK,异步需要加入二极管的电压
步骤:
(1)确认输出电流Iout
(2)确认电感值
已知纹波电流求感值:Lmin=(Vin-Vout) x Vout / (△I x f x Vin),这样算出来的单位是H,1H=1000mH,1mH=1000μH,1μH=1000nH
一般来说 △I(上图的Ipp)取20%-30%的Iout(最大输出电流),也有说电流纹波比0.3-0.4,所以通常取0.3,f为DCDC开关频率
补充:已知感值求纹波电流:△I =(Vin-Vout) x Vout / (L x f x Vin)
(3)根据Lmin选取L,一般略取大一点
(4)通过上面的公式计算△I,Imax
Imax=Iout+1/2 △I,饱和电流要大于Imax
(5)确认电感的饱和电流要大于Imax
温升电流要大于Iout
确认输出电流
以上公式网上颇多,主要是有一个问题,上述的Iout到底取多少呢?是DCDC芯片的最大输出电流能力,还是实际工作过程中真正使用的最大电流呢?应是DCDC芯片的最大输出电流能力,比如2A的DCDC芯片,那么这里Iout取2A。
理由如下:假设实际要用到2A电流,与芯片能力是一样的,那么不管取芯片电流能力还是实际使用电流,按照公式算得电感值是相同的,用这个电感可以设计出输出2A的DCDC电路。这时如果用这个电路接入500mA的负载,即实际输出电流是500mA,难道就不能用了,显然是可以的。
由公式知道,L与输出电流成反比,如果按照实际电流计算,在接小负载时,比如200mA,那么算得的L值是2A时的10倍,电感值大,体积就大,这是我们不希望的。只不过如果按照芯片能力2A算得的电感,这时如果负载比2A要小,DCDC电路会比较容易进入断续模式(DCM),即电感电流不连续。
另外值得一提的是,如果按照实际输出电流来算电感值,电路当然也是可以工作的,只不过如果电感太大的话,可能会影响输出的动态响应。
注意:电感值小的话,输入输出滤波电容容值就要大一些,电感值越小,电感电流峰峰值就越大,这个波动电流是需要电容进行充放电来完成的。输出电压纹波同等的情况下,充放电电流变大了,自然电容也会大一些。
电感选型时电流参数
Imax=Iout+1/2 △I
本来按照这个公式,电感的饱和电流要大于Imax,电感的温升电流要大于Iout。Iout取芯片最大输出能力电流,然后实际选型留70%-80%的余量,这样设计电路功能是没有问题的。
但有时可能有如下场景:DCDC芯片A是公司最常用的,芯片能力是3A,有个电路需要用到DCDC,实际最大电流需求是1A。按照上述公式来选,可能电感电流需要选到5A左右,但是实际工作中,可能Imax也就2A,那么能不能选个3A的电感呢?毕竟电流下,电感便宜,体积也小。
这是就需要权衡一下了,选用3A的电感,功能应该是没问题的。但有些异常的情况,比如输出短路,可能会导致无法启动短路保护造成故障。因为一般DCDC芯片有短路保护,是在电流超过一定值的时候芯片会进入保护,3A的DC-DC,短路保护电流值一般是4-5A,如果电感最大工作电流过小,可能会造成电感在烧坏前还没有启动过流保护。
所以,如果可以的话,还是按照Imax=Iout+1/2 △I这个公式,Iout取DCDC芯片的最大输出能力来算。
电感感值越大和越小的影响
电感感值越大,DCDC最大输出电流越小,即带载能力越弱,反之带载能力越强;电感感值越大,DCDC输出电压纹波越小,反之纹波越大。



















 9531
9531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











