







文章目录
0、前言
轮速传感器是用来测量汽车车轮转速的传感器。对于现代汽车而言,轮速信息是必不可少的,汽车动态控制系统(VDC)、汽车电子稳定程序(ESP)、防抱死制动系统(ABS)、自动变速器的控制系统等都需要轮速信息。
一般来说,所有的转速传感器都可以作为轮速传感器,但是考虑到车轮的工作环境以及空间大小等实际因素,常用的轮速传感器主要有:磁电式轮速传感器、霍尔式轮速传感器。不过目前主流的是轮速传感器都是基于磁环 - 传感器的霍尔式电流信号生成,均需要主动供电,在实车上常见的为12V供电,传感器供电范围参考:4.8V ~ 20V(Bosch)。被动式轮速传感器一般用于商用车,主动式(主动式非智能、PWM协议智能式及AK协议智能式)轮速传感器一般用于乘用车。

1、原理及特点
1-1、磁电式轮速传感器
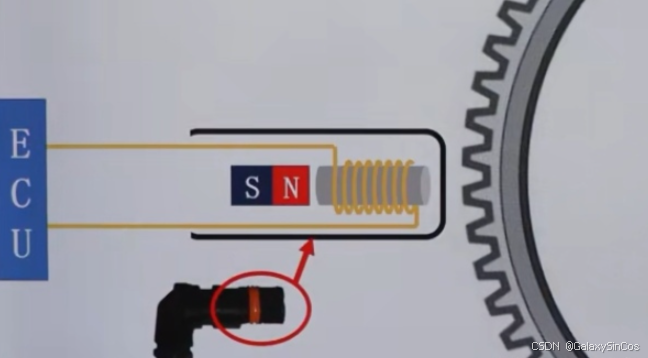
磁电式轮速传感器是利用电磁感应原理设计的。当通过线圈的磁场强度发生变化时,线圈内会产生感应电动势。如Figure2. 磁电式轮速传感器所示,磁铁固定放置,信号轮旋转会引起线圈磁场变化,信号轮接近与远离线圈会产生相反方向的电动势,从而形成交流电。当车轮转速越快,则信号轮的转速也越快,产生交流电的频率也越快。磁电型轮速传感器为无源型,无需外接电源,只有两根信号线。

它具有结构简单、成本低、不怕泥污等特点,在现代轿车的ABS防抱死制动系统中得到广泛应用。但是磁电式轮速传感器也有一些缺点:1)频率响应不高。当车速过高时,传感器的频率响应跟不上,容易产生误信号;(2)抗电磁波干扰能力差,尤其是输出信号振幅值较小时。
1-2、霍尔式轮速传感器
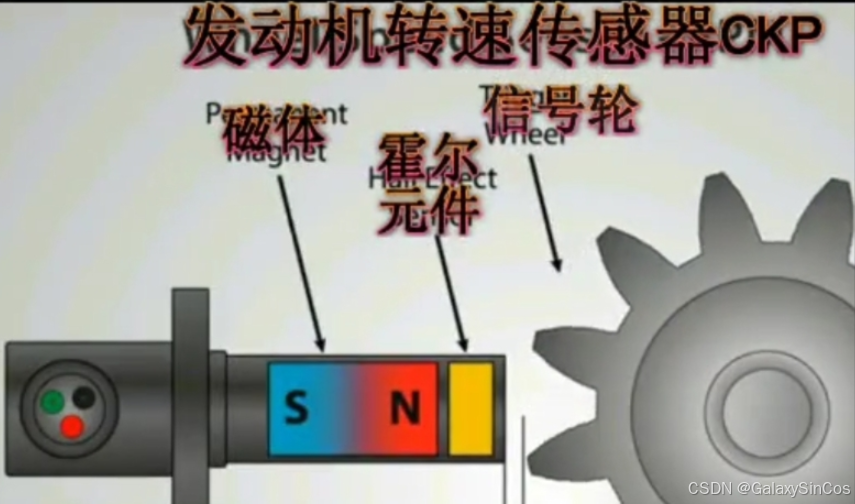
霍尔式轮速传感器利用霍尔效应原理制成的。通电的霍尔元件在磁铁的作用下,电子会发生偏转,从而产生霍尔电动势。如Figure3. 霍尔式轮速传感器所示,信号轮接近霍尔元件,磁场强度变大,霍尔电动势也会变大,信号轮远离霍尔元件,磁场强度变小,霍尔电动势也会变小。从而形成了方波信号。车速越快,方波信号的频率越快。

霍尔式轮速传感器在汽车上也获得了较多应用(目前是主流)。霍尔式轮速传感器具有如下特点:(1)输出信号电压振幅值不受转速的影响;(2)频率响应高;(3)抗电磁波干扰能力强。
2、轮速传感器供应商
目前,在Tire1制动产品厂商中,使用频次较高的轮速传感器品牌为(排名不分先后):
- Bosch博世
- Infineo英飞凌
- NXP恩智浦
3、安装选型及布局
常见的制动产品有时不会使用一种轮速传感器,制动产品供应商通常会采用以下几种形式:
- 4个AK类型轮速传感器
- 4个PWM类型传感器
- 2个AK协议传感器 + 2个7/14mA类型传感器
- 2个AK类型传感器 + 2个PWM类型传感器
- 2个PWM类型传感器 + 2个7/14mA类型传感器
附加:目前有制动产品采用 OneBox + RBU形式,实车布置形式分为几类:
- 共装4个单通道轮速传感器,RBU中轮速信号来自于OneBox硬线转发;
- 共装4个双通道轮速传感器,会有4个引脚,分别连接至OneBox与RBU,互不干扰;
- 共装6个单通道轮速传感器,前轮安装2个,后轮安装1个,RBU后轮速信号来自于OneBox转发,前轮信号来自于传感器。
在实车上,轮速传感器会有意对调方向安装,如左侧2个传感器正装,右侧2个传感器反装。
4、仪表盘上车速获取
汽车仪表盘的当前车速显示分为2种情况:
- 正常情况下:通过制动控制器读取轮速值,计算当前车速,发送到动力CAN和底盘CAN,直接发送或者经由网关、域控制器等传递给中控屏对应控制器。
- CAN总线故障:此时中控屏的车速显示来自于制动产品的硬线占空比输出信号,通常为5V,占空比50%,由控制器计算出车速控制生成不同频率。
附加:常见制动产品类似的硬线冗余信号还有一个 右前(FR,Front Right)轮速值。
5、主动式非智能轮速传感器
5-1、Type Ⅰ
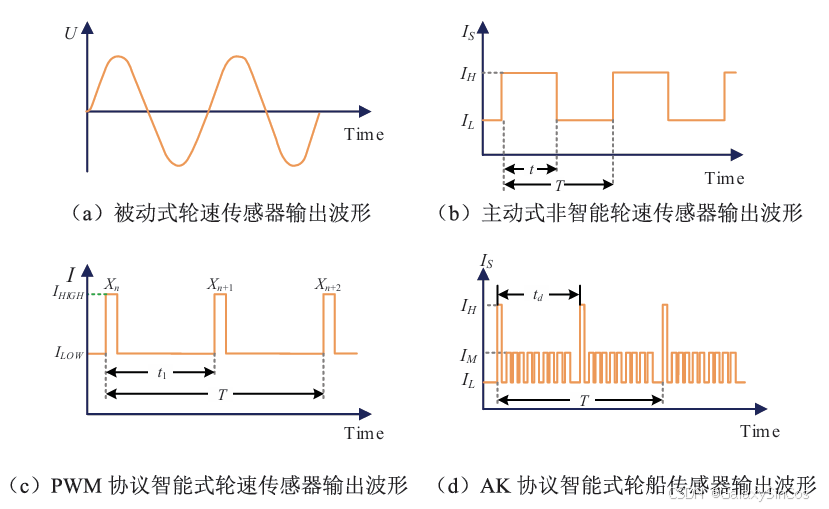
根据Figure1. 轮速传感器输出信号类型可知,(b)表示高低电流交替进行的方波信号。一般来说,在传感器允许的气隙范围内,方波信号的参数是基本一致的,或者说是有效的。这里的参数主要包含高电流IH,低电流IL与占空比t/T(一般为50%),参数有效体现在数值处于一定区间内,这主要是由芯片性能确定,一般要求IH处于11.5mA ~ 16.8mA,IL处于5.7mA~ 9.6mA,占空比30% ~ 70%。输出参数稳定有效,与轮速传感器相连接的处理单元才能够有效识别出轮速。
5-2、理论规范
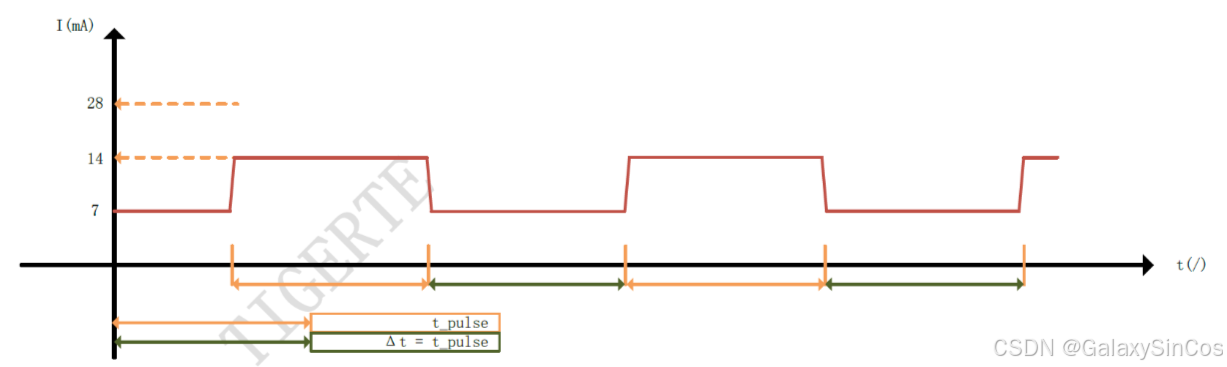
1个磁环 = 1个脉冲 = 2个边沿。假设实车上磁环的磁对极个数为 48 齿,那么轮速传感器每经过一个磁极(齿),就会产生一个脉冲,磁环转一圈共48个脉冲。一个脉冲,为下图Figure4. TypeⅠ- 7/14型传感器中t_pulse + Δt。
- 波形生成阈值:7mA、14mA;
- 信号检测方式:边沿触发,上升沿是逻辑1;
- 协议信号特征:占空比是50%,t_pulse = Δt;
- 轮速体现形式:Δt,结合车轮半径及车轮齿数换算物理轮速值。
附加:此种轮速传感器仅有速度值信息,无方向及气隙的检测(安装位置是否存在偏差,即轮速传感器和磁环的距离是否太远)。

5-3、实测示例


6、PWM智能式轮速传感器
6-1、Type Ⅱ
根据Figure1. 轮速传感器输出信号类型可知,(c)中的传感器相当于(b)中传感器的升级版,表现在通过一定的方式体现出转速外更多的信息。(c)中Xn 的脉宽相对于半周期t1 较窄(这里要注意的是:相对于(b),PWM协议传感器占空比也是50%的上下区间,但不是tx / t1 ,而是t1 / T ),这是该类传感器通过脉宽调制的方式输出额外信息,包括安装气隙的变化、车轮的正反转以及其他的警告信息。
6-2、理论规范
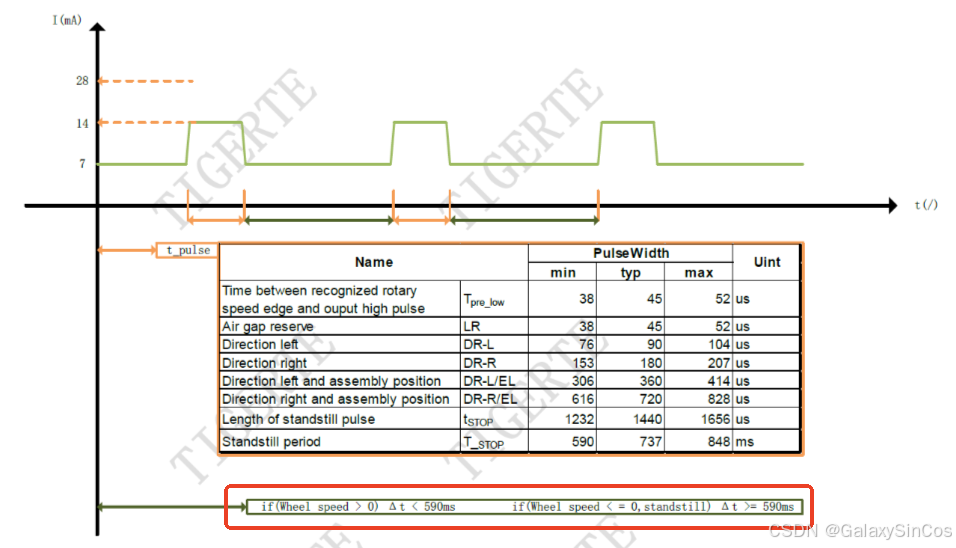
1个磁环 = 2个脉冲 = 4个边沿。假设实车上磁环的磁对极个数为 48 齿,那么轮速传感器每经过一个磁极(齿),就会产生两个脉冲。磁环转一圈共96个脉冲。一个脉冲,为下Figure6. TypeⅡ- PWM型传感器中t_pulse + Δt。
- 波形生成阈值:7mA、14mA;
- 信号检测方式:边沿触发,上升沿是逻辑1;
- 协议信号特征:t_pulse脉宽不同情况下表现也不一样,见Figure6. TypeⅡ- PWM型传感器;
- 轮速体现形式:Δt,结合车轮半径及车轮齿数换算物理轮速值。
附加:standstill(静止)状态下,t_pulse恒定为1440us,Δt恒定为737ms。

6-3、实测示例
6-3-1、Left(Front)


 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}