步骤
确定结构参数
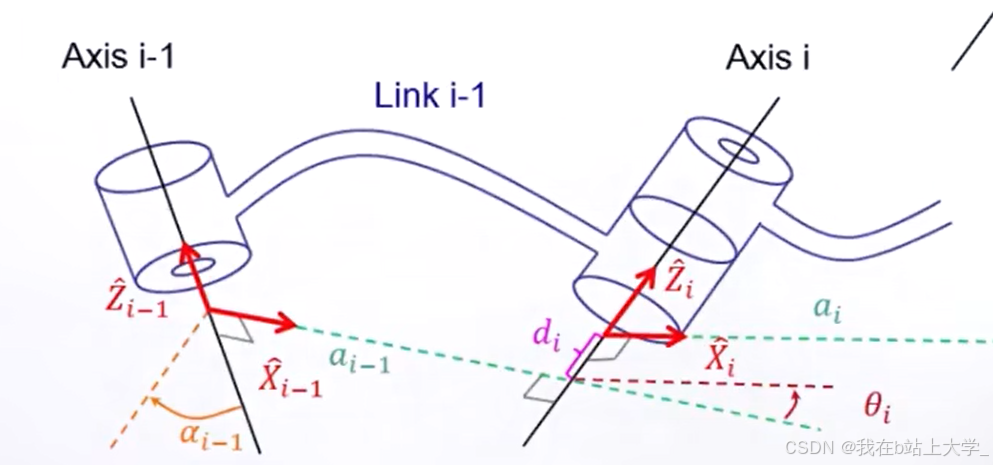
1、确定z,z的方向即为轴线方向
2、确定a
空间中两条不相交的轴线有一条公共的垂线段,其中两条轴线平行时有多条垂线段;a即为这个公共垂线段,如果两轴线相交,那么a为0。
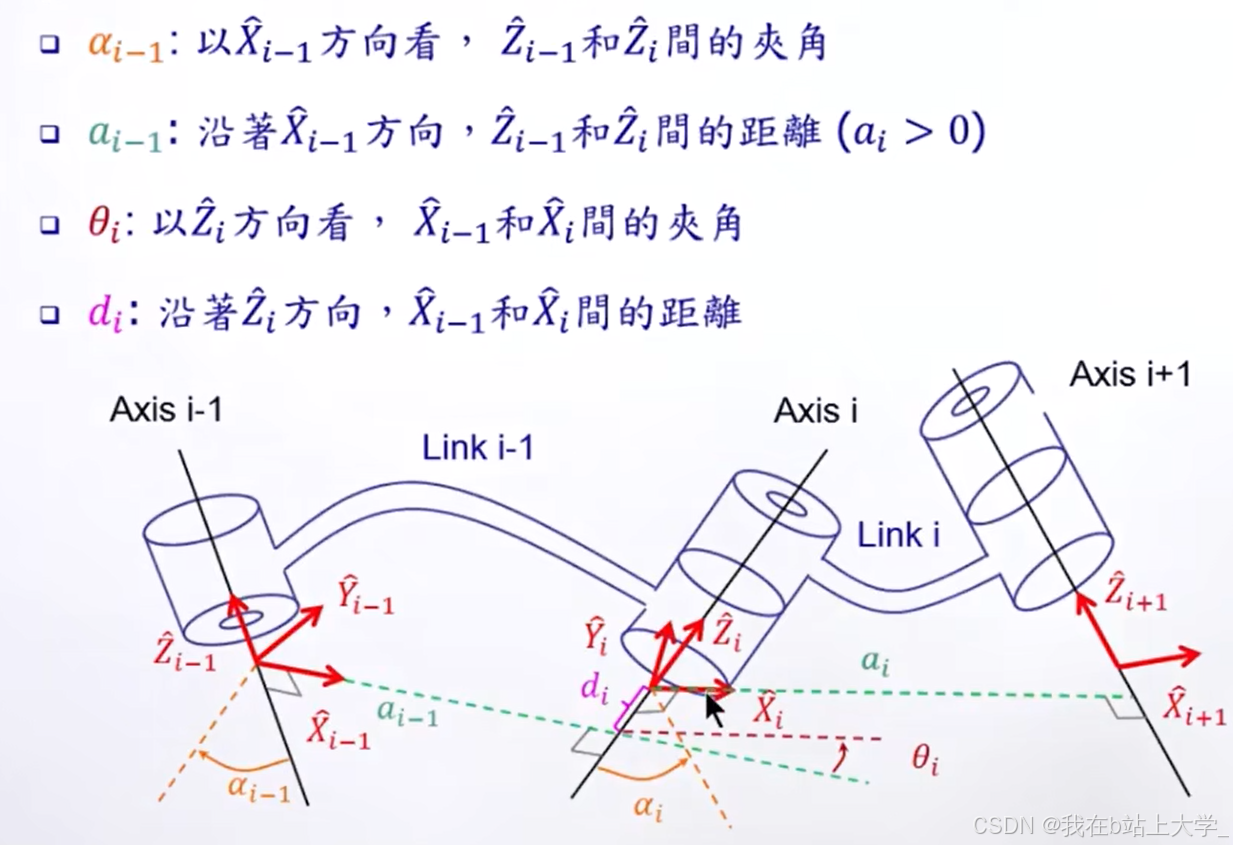
3、确定α
α即为两条相邻轴线之间形成的夹角
4、确定d
d为该轴相邻的两个垂线段与该轴相交点的距离。
5、角度θ
θ为该轴两个公共垂线段形成的夹角,犹豫六轴机械臂的每个轴都是转动的,所以θ是变换的。
确定坐标轴方向
1、确定坐标原点
坐标原点为a与轴线相交的点
2、确定x
- 如果a不为0,那么x的方向沿a的方向
- 如果a为0,此时两轴线相交,x的方向与zi和zi+1垂直
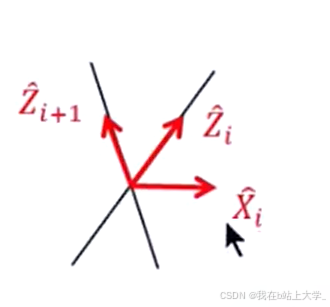
3、确定y
通过右手法则确定
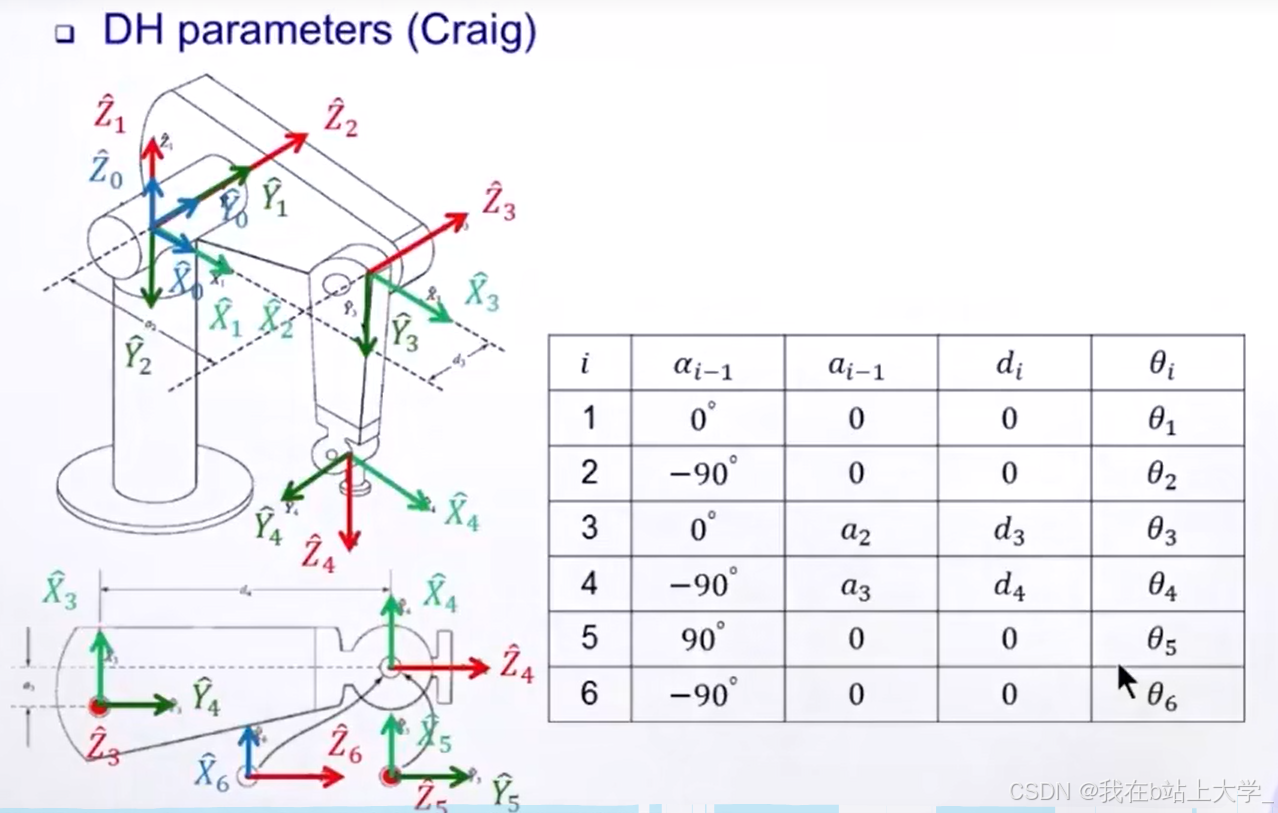
总结表





 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 7698
7698





