






一:简述
在工程实际中,应用最为广泛的调节控制规律为比例积分微分控制, 简称 PID控制。PID控制器结构简单、稳定性好、工作可靠、调整方便。PID调节器的微分方程数学模型:
式中是PID控制器的输出信号,这个信号输送到被控对象。
是PID控制器的输入信号,
,其中
是系统给定的输入信号;
是系统的被控量。其传递函数模型为:
由上式可以得出PID控制器的几种特殊形式:
1,当Td=0、Ti=∝时,则有 ,此为比例P调节器;
2,当 Ti = ∝时,则有 ,此为比例微分PD调节器,相当于超前校正;
3,当 Td = 0 时,则有,此为比例积分PI调节器,相当于滞后校正;
4,当Kp ≠0、 Td ≠0、 Ti ≠∝时, 则有 , 为全 PID 调节器。
PID 控制是通过 3 个参量 Kp 、Ti、Td 起作用的。 这 3 个参量取值的大小不同, 就是比例、 积分、微分作用强弱的变化。对于P调节器,随着 Kp 值的加大,闭环系统的超调量加大,系统响应速度加快。若 Kp 超过一定值, 则系统会变得不稳定。 对于PI调节器, 随着Ti值的加大,闭环系统的超调量减小, 系统响应速度略微变慢。 对于PID调节器, 由于微分环节的作用, 在曲线的起始上升段呈现尖锐的波峰,之后曲线也呈衰减 的振荡; 保持 Kp、Ti 一定值不变, 在一定范围内,随着 Td 值的加大,闭环系统的超调量增大,但经过曲线尖锐的起始上升段后响应速度有所变慢。
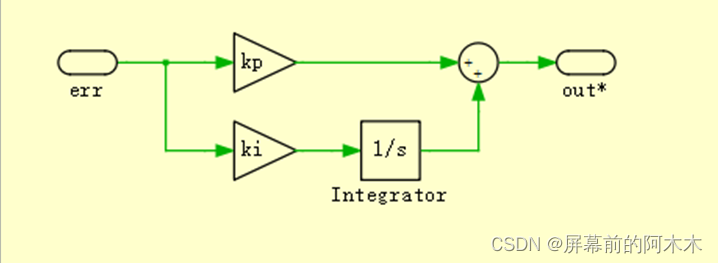
二:模拟PI控制器
PI控制器基于PLECS软件的实现如下图所示。
三:数字PI控制器
PI控制器的数字实现将基于PLECS软件的C模块进行代码编写。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









