







 本文是一篇针对欧姆龙NX控制器和Sysmac Studio的电机配置教程,适合初学者。文中详细介绍了如何进行硬件连接、新建工程、通信设置,特别是控制器与电机的PDO映射关系配置,以及如何处理重启时的报错问题。最终目标是实现通过控制器进行电机轴的基本配置,不涉及复杂的电机运动编程。
本文是一篇针对欧姆龙NX控制器和Sysmac Studio的电机配置教程,适合初学者。文中详细介绍了如何进行硬件连接、新建工程、通信设置,特别是控制器与电机的PDO映射关系配置,以及如何处理重启时的报错问题。最终目标是实现通过控制器进行电机轴的基本配置,不涉及复杂的电机运动编程。
欧姆龙NX控制器与Sysmac studio的电机配置方法
0. 前言
笔者最近需要使用到欧姆龙的多轴运动控制器来控制电机运动,但网路上关于Sysmac studio的教程或文章较为零散,作为初学者的笔者难以消化,故在稍微会用软件后撰写本文,为自己留个笔记,同时希望能够帮助到需要的人。
1.本文面向买了欧姆龙控制器与电机,装上Sysmac Studio软件却不会用、不熟悉大部分操作的人,小白适用。
2.本文教学内容所用的硬件如下:
- 一台能使用Sysmac studio的上位机
- 欧姆龙运动控制器一台:NX102-9000 (硬件版本:1.42)
- 伺服电机一台:零差云控机器人关节80I
- 控制器电源:24VDC
- 电机驱动器电源:根据电机而定,本文使用的电机输入电压为48VDC
3.本文的任务目标为:使用欧姆龙控制器,通过Sysmac studio编程进行电机轴与通信的基本配置,不涉及电机运动编程。
4.本人水平有限,若有错误与建议还请多加指教,谢谢。
1. 实际硬件连接
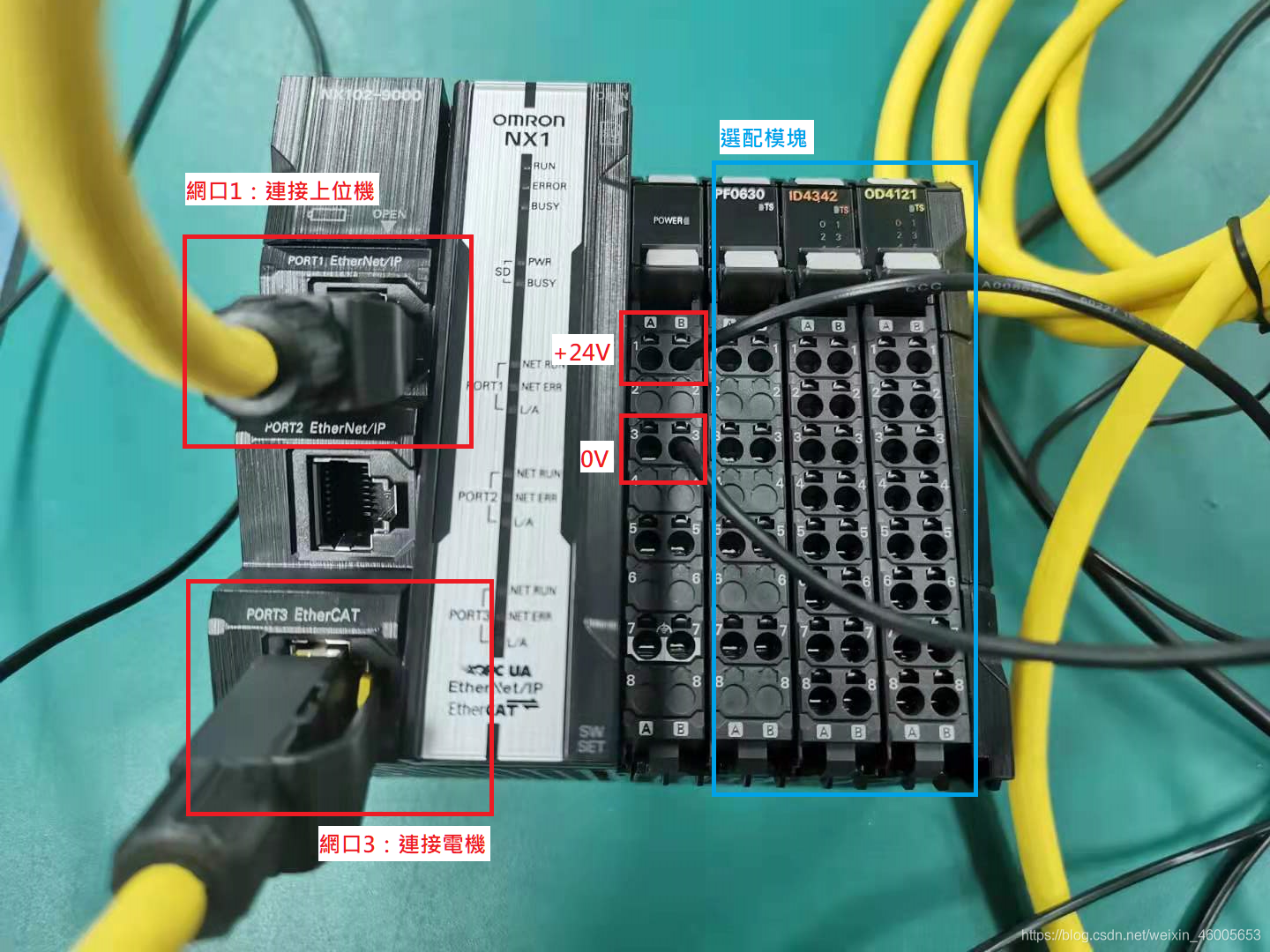
下图为NX102-9000控制器的硬件连接图,连接上非常简单:
- 网口1:使用EtherNet/IP通信,连接到上位机网口
- 网口3:使用EtherCAT通信,连接到电机接口
- 电源模块:本控制器输入电压为24VDC,按照说明书接到指定端口就行
以上三个部分接上就可以准备进行调试了,控制器右方为控制器的3个选配模块,由于NX102-9000本体没有I/O接口,所以需要选配数字输入/输出与I/O供电模块才能与传感器搭配使用,不过这部分本文用不到,可以无视。
2. Sysmac studio 配置
2.1 新建工程
对一个使用陌生软件的小白如我来说,第一步肯定是从创建工程/项目开始,名称、作者、注释都可以随意设置,下方的设备根据实际的控制器进行选择,本文使用的是NX102-9000,硬件版本1.42的控制器。
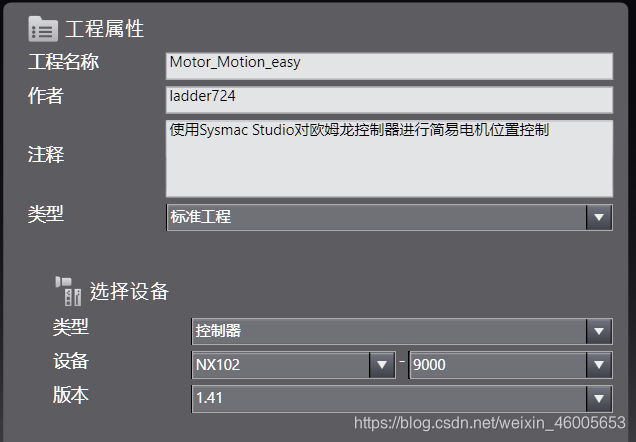
然而笔者使用的Sysmac studio软件较旧,设备中控制器版本最高只到能选到1.41,这部分没有关系,就算软件的设备版本落后于实际硬件版本也能正常使用控制器功能。此外,若选错或控制器不只一台也没关系,可以在创建工程后于左方菜单中修改或添加新设备。
2.2 通信设置
2.2.1 软件内通信设置
创建了新的工程后,首先应该先进行上位机与控制器的通信设置
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









