







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
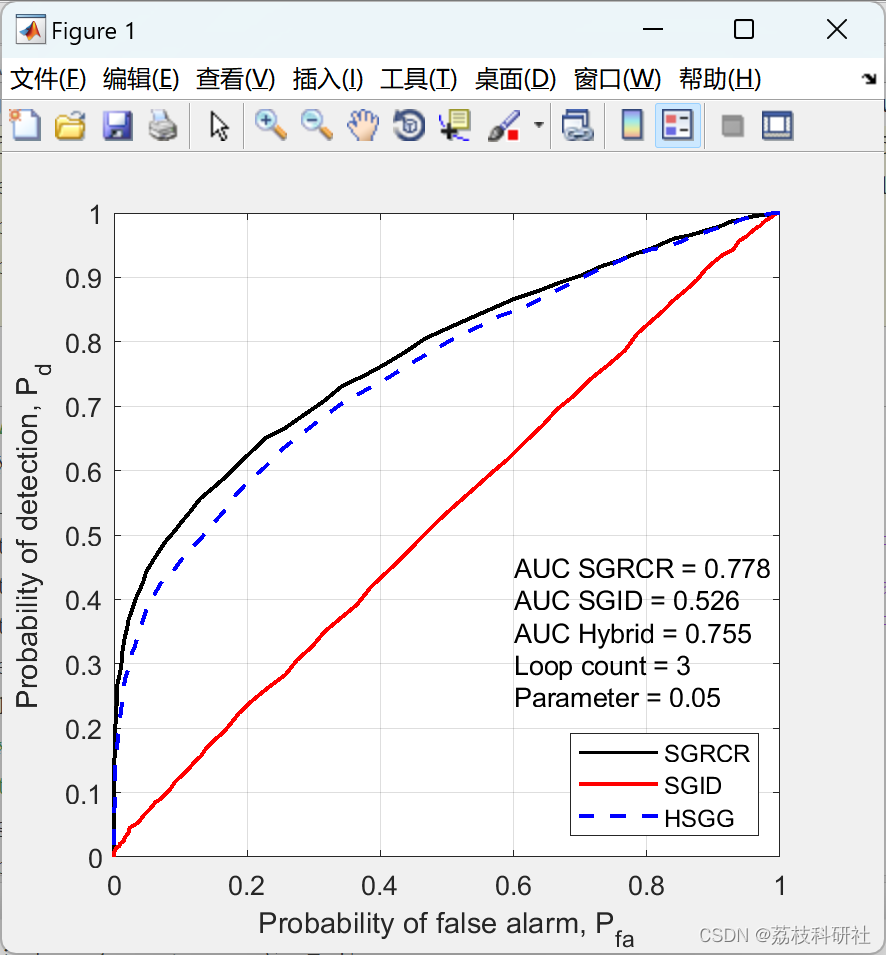
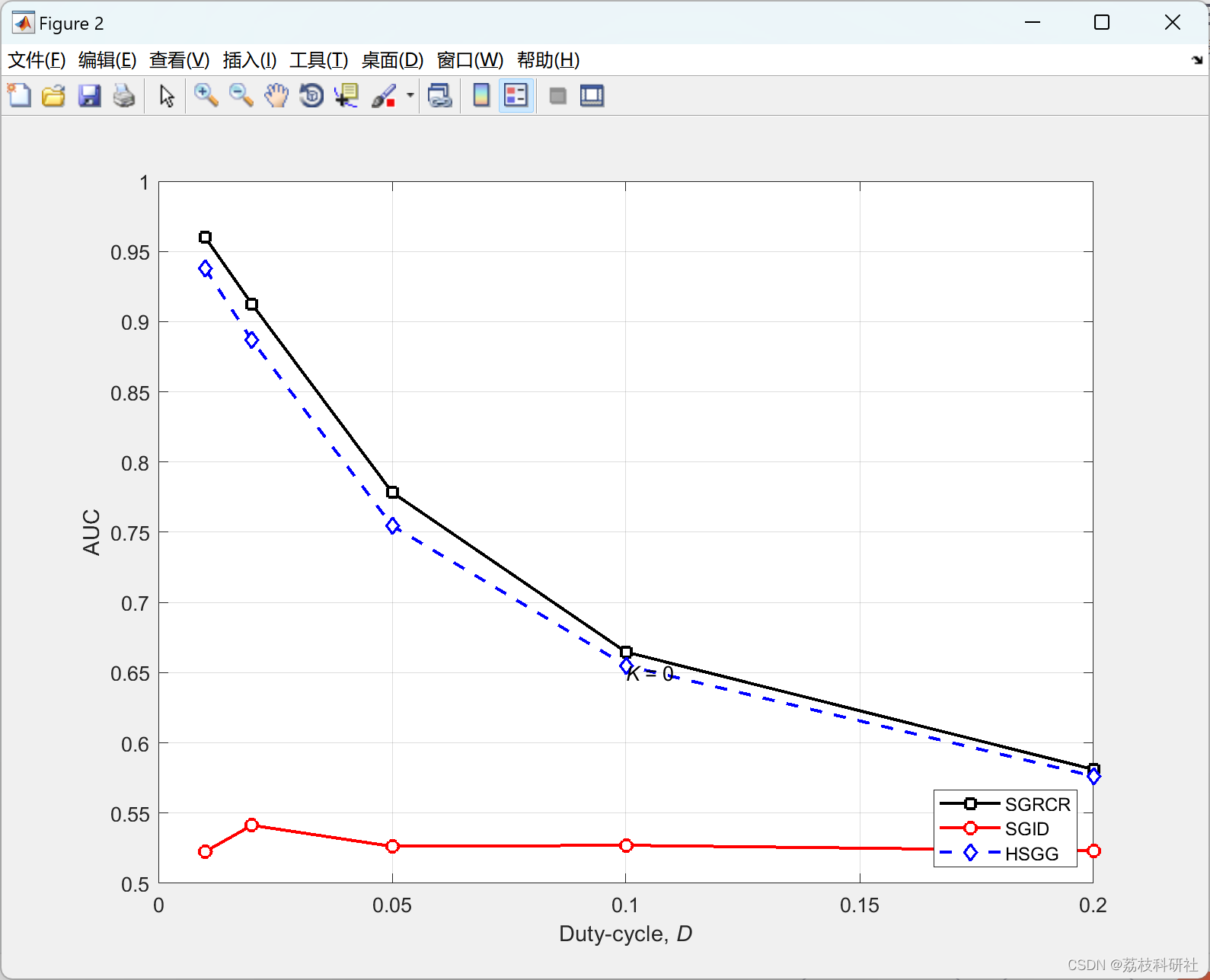
Gershgorin半径和中心比(GRCR)和基尼指数检测器(GID)最近被提出作为集中式协作频谱传感的低计算复杂度的鲁棒解决方案。随后,它们基于滑动窗口的版本,称为SGRCR和SGID,已被设计用于雷达波段的频谱传感。虽然SGID在优势传播路径的特定情况下(即高稻因子K)具有优越的性能,但SGRCR与K的性能变化相对较小,但当K高时优于SGID。本文以GRCR和GID的互补行为为启发,提出了一种基于混合滑动窗口的GRCR-GID(HSGG)检测策略。新的测试统计量由每个滑动传感窗口的GRCR和GID检验统计量的加权和组成。数值结果表明,混合探测器结合了基础探测器的最佳属性,在任何Rice因子下都实现了高性能。具体来说,当K = 0时,它的性能比SGRCR差一点,比SGID好得多,对于K的轻度到高值,它的表现与SGID一样好。此外,在某些情况下,HSGG可以击败SGRCR和SGID。
详细文章讲解见第4部分。
📚2 运行结果
部分代码:
%% ROCs
figure(1); set(gcf,'Position',[100 100 430 400]) % main screen
plot(1-CDF0_GRCR,1-CDF1_GRCR,'k-','LineWidth',1.5,'MarkerSize',8,'MarkerFaceColor','w'); hold on
plot(1-CDF0_GID,1-CDF1_GID,'r-','LineWidth',1.5,'MarkerSize',8,'MarkerFaceColor','w');
plot(1-CDF0_Hyb,1-CDF1_Hyb,'b--','LineWidth',1.5,'MarkerSize',8,'MarkerFaceColor','w');
txt1=['AUC SGRCR = ',num2str(A_GRCR(loop),3)]; text(0.6,0.45,txt1);
txt2=['AUC SGID = ',num2str(A_GID(loop),3)]; text(0.6,0.40,txt2);
txt3=['AUC Hybrid = ',num2str(A_Hyb(loop),3)]; text(0.6,0.35,txt3);
txt4=['Loop count = ',num2str(loop)]; text(0.6,0.30,txt4);
txt5=['Parameter = ',num2str(Parameter(loop))]; text(0.6,0.25,txt5);
legend('SGRCR','SGID','HSGG','Location','Southeast'); axis([0 1 0 1]); grid on;
xlabel('Probability of false alarm, P_{fa}')
ylabel('Probability of detection, P_d'); hold off
end
%% AUC x Parameter
posX=0.1; posY=0.6;
figure(2); set(gcf,'Position',[550 100 250 400]) % main screen
plot(Parameter,A_GRCR,'k-s','LineWidth',1.5,'MarkerSize',6,'MarkerFaceColor','w'); hold on
plot(Parameter,A_GID,'r-o','LineWidth',1.5,'MarkerSize',6,'MarkerFaceColor','w');
plot(Parameter,A_Hyb,'b--d','LineWidth',1.5,'MarkerSize',6,'MarkerFaceColor','w');
legend('SGRCR','SGID','HSGG','Location','Southeast');
txt1=['{\it{K}} = ',num2str(K)]; text(posX,posY+0.05,txt1);
% txt2=['{\it{m}} = ',num2str(m)]; text(posX,posY+0.025,txt2);
%txt3=['{SNR} = ',num2str(SNRavg),' dB']; text(posX,posY,txt3);
ax=gca; ax.XTick = linspace(0*min(Parameter),max(Parameter),5);
xlabel('Duty-cycle, \it{D}'); grid on; % Varying parameter value
ylabel('AUC'); axis([0*min(Parameter) max(Parameter) 0.5 1]); hold off
toc
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1] D. A. Guimares, Robust Test Statistic for Cooperative Spectrum
Sensing Based on the Gerschgorin Circle Theorem, IEEE Acces, Vol. 6,
December 2017, pp-2445-2456. DOI 10.1109/ACCESS.2017.2783443.
[2] D. A. Guimares and C. H. Lim, Sliding Window Based Detection for
Spectrum Sensing in Radar Bands, IEEE Communications Letters, May 2018.
DOI: 10.1109/LCOMM.2018.2834932.
[3] D. A. Guimares, Gini Index Inspired Robust Detector for Spectrum
Sensing over Ricean Channels. IET Electronics Letters, December 2018.
DOI: 10.1049/el.2018.7375.
[4] D. A. Guimares and C. H. Lim, Performance of Simple and Fast Sliding
Window Detectors for Spectrum Sensing in Radar Bands, XXXVII Simp贸sio
Brasileiro de Telecomunicaes e Processamento de Sinais - SBrT2019,
29/09-02/10/2019, Petrpolis, RJ, Brasil. SUBMITTED
[5] D. A. Guimar茫es, Combinao Linear de Estatsticas de Teste para
Senroriamento Espectral Cooperativo, XXXVII Simpsio Brasileiro de
Telecomunicaes e Processamento de Sinais - SBrT2019, 29/09-02/10/2019,
Petrpolis, RJ, Brasil. SUBMITTED.
[6] D. A. Guimares, Hybrid Sliding-Window Detector for Spectrum Sensing
in Radar Bands. Journal of Communication and Information Systems, 2019. SUBMITTED.
[7]陈强,柯杭,赖绍钧,陈彦.福州地区X波段相控阵雷达与S波段机械雷达回波数据对比分析[J].海峡科学,2022(12):7-12.

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











