






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
光伏发电系统最大功率跟踪控制Simulink仿真模型(电导增量法+扰动观察法)
该模型是为了实现光伏发电系统的最大功率跟踪而设计的,主要包含光伏电池模块、直流升压模块以及最大功率跟踪控制模块。
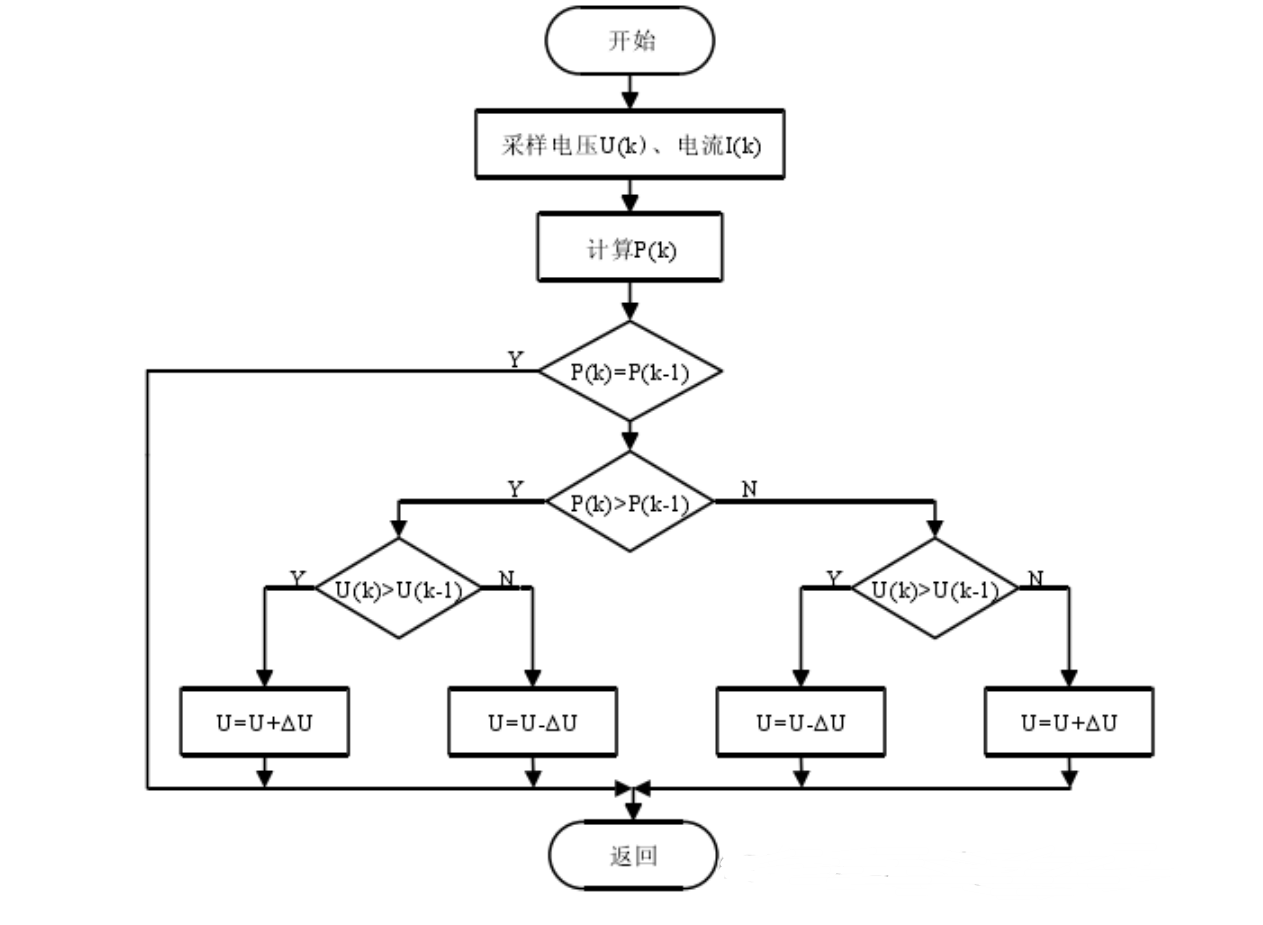
在扰动观察法(P&O)中,系统会定期给予工作电压一个可正可负的增量,并观察系统功率的变化情况。如果功率增加,则继续施加相同方向的增量;反之,则施加相反方向的增量,直到输出功率达到最大值。P&O是目前应用较广泛的一种控制策略,其最大功率跟踪过程如图所示。
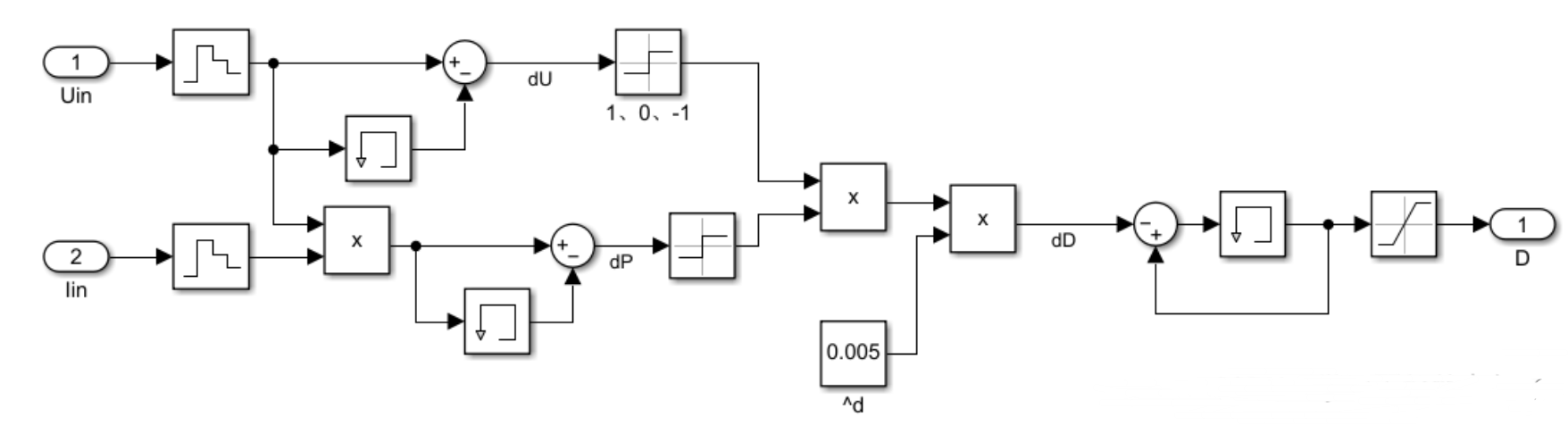
电导增量法则是利用光伏电池特性曲线上仅有一个最大功率点来进行跟踪控制。在光伏电池的特性曲线中,输出功率P是关于输出电压U的函数,输出电流I也是关于输出电压U的函数。通过对输出功率P对输出电压U求导,得到导数dP/dU。根据导数dP/dU与零的大小关系,可以判断当前工作电压与最大功率点处的电压大小关系。
在模型中,这两种方法相结合,通过对光伏电池模块进行电导增量法和扰动观察法的控制,实现了对光伏发电系统的最大功率跟踪。这种综合应用能够充分利用光伏电池的特性曲线,确保系统始终工作在最大功率点,从而提高光伏发电系统的效率和能源利用率。
通过Simulink仿真模型的建立和调试,可以对光伏发电系统的最大功率跟踪控制进行全面的分析和评估。这样的模型可以为光伏发电系统的设计和优化提供重要参考,帮助提高光伏发电系统的性能和可靠性。

📚2 运行结果
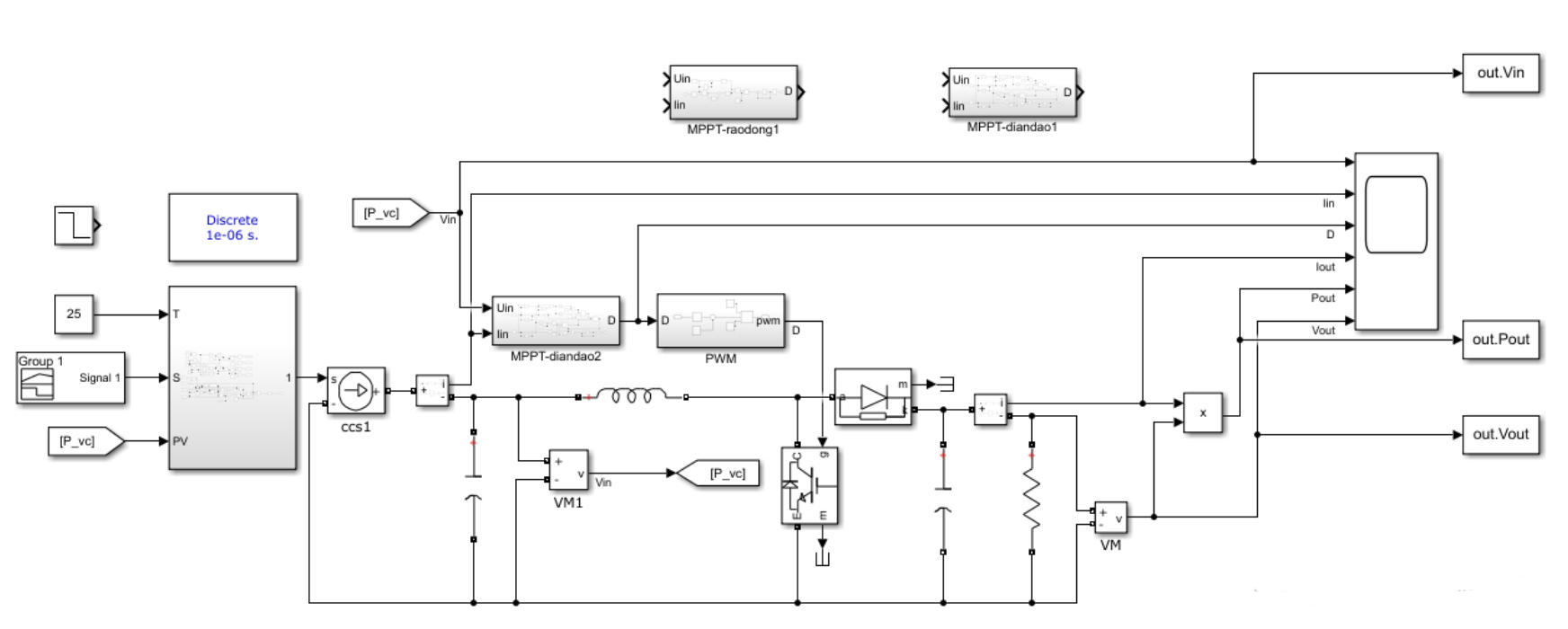
2.1 整体模型
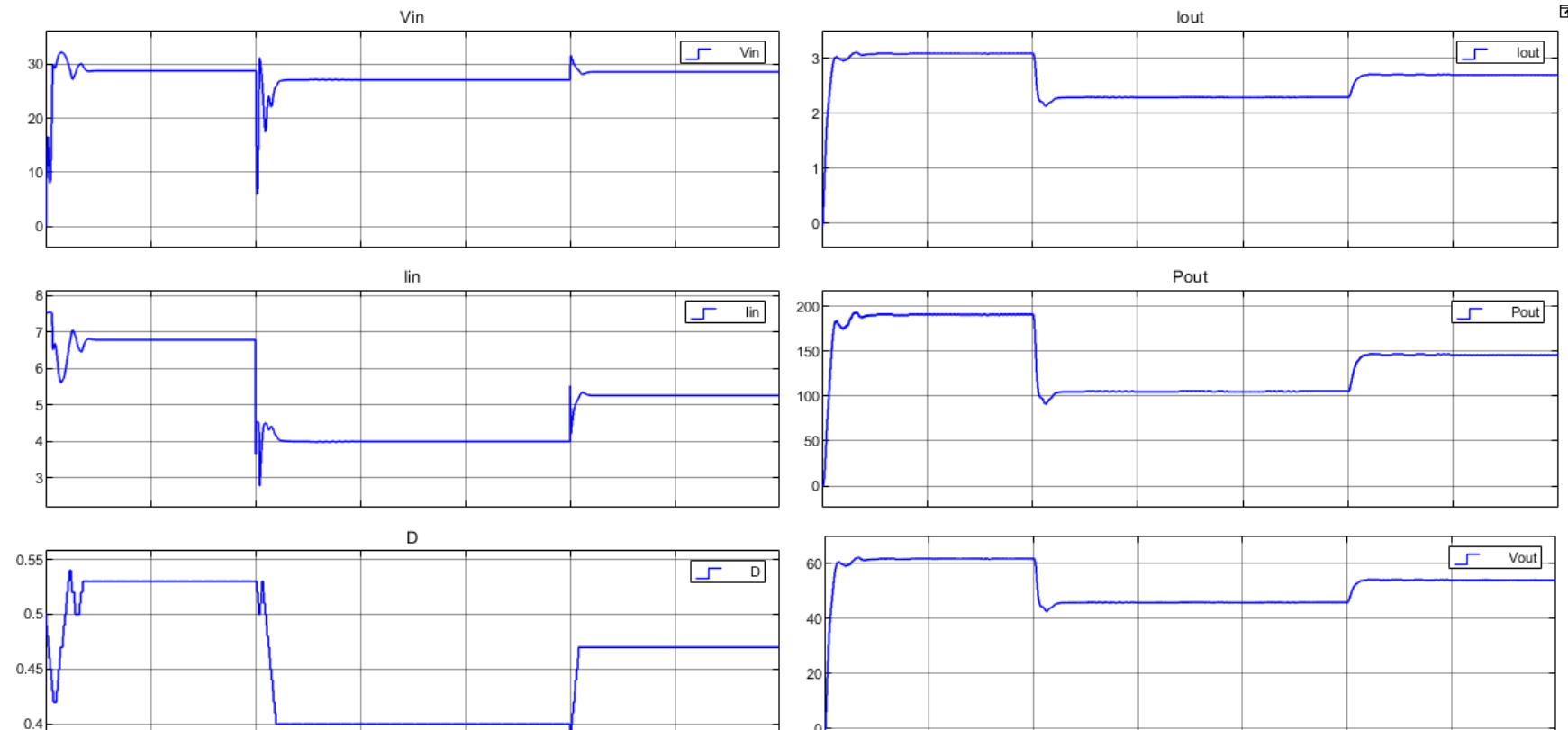
 2.2 电导增量法仿真各参数曲线
2.2 电导增量法仿真各参数曲线
2.3 扰动观察法仿真各参数曲线

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]付皎.独立光伏发电系统最大功率跟踪研究[D].内蒙古科技大学,2013.DOI:10.7666/d.D426344.
[2]杨元培,杨奕,王建山,等.光伏发电系统电池最大功率跟踪控制仿真[J].计算机仿真, 2018, 35(6):6.DOI:10.3969/j.issn.1006-9348.2018.06.026.
[3]栾军山.光伏发电系统最大功率点跟踪控制策略研究[J]. 2012.DOI:10.3969/j.issn.1004-9649.2012.11.016.
[4]栾军山冯涛陈华.光伏发电系统最大功率点跟踪控制策略研究[J].中国电力, 2012, 045(011):74-77,95.

















 1715
1715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











