






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
参考文献:
摘要
在本文中,我们介绍了一个分析解,用于描述受端部力和弯矩作用的大挠度、有限应变和平面Reissner梁。该解是用雅可比椭圆函数表示的。所得到的分析解通过数值示例得到了增强。本文还详细讨论了梁在端部受轴向压缩载荷并受各种边界条件限制下的屈曲和屈曲后行为。特别是,针对所有边界条件推导出了屈曲系数。
在本文中,我们关注于描述最初直的、无重量、均匀各向同性和线性弹性梁受端载荷作用时的大挠度方程的分析解,该方程由Reissner(1972)提出。这些方程背后的理论增强了著名的Euler–Bernoulli大挠度梁理论,包括了拉伸和剪切应变,并且不仅限于线性本构行为。为方便起见,我们称通过这一扩展理论描述的梁为Reissner梁,尽管该理论的方程形式上与平面Cosserat梁理论(Antman,2005)的方程完全一致。
有关这一非常特定主题的现有文献相对较少。1950年Pflüger,1968年Stoker以及Magnusson和合著者(2001)提出了受轴向压缩力作用的简支伸展梁的椭圆积分解。Humer于2011年、2013年提供了Reissner梁的闭式椭圆积分解。在第一项研究中,作者将这一解应用于受集中力作用的梁的平衡问题,其中一端夹紧,另一端可自由滑动;在第二项工作中,研究了梁的屈曲和屈曲后行为问题。Goto及其同事(1990)发表了关于具有轴向和剪切变形的弹性梁的闭式解,使用了椭圆积分。但是,这些作者采用的基础理论是具有有限位移和有限应变的Timoshenko梁理论。与Humer的解只涉及第一类和第二类椭圆积分不同,他们的解还包括第三类椭圆积分。Stemple(1990)还提供了伸展梁的椭圆积分解;然而,他积分的方程是从他自己的梁理论导出的。
这个简要回顾表明,对于伸展和剪切变形梁的现有解是用椭圆积分表示的。椭圆积分解的一个缺点是它是隐式的;也就是说,在描述梁坐标的公式中,自变量是梁横截面的倾斜度,而不是梁弧长。
本研究的目的是提供Reissner梁的Jacobi椭圆函数解。这些函数相对于椭圆积分具有一些优势,因为它们适用于任何参数值,它们由简单的加法关系连接,并遵循简单的导数规则(Reinhardt和Walker,2010)。对于Euler–Bernoulli梁,一些作者已经证明了这样一个解(Batista,2014;Batista,2015a;Batista,2015b;Goss,2003;Levyakov,2001;Love,1944)。我们还讨论了解的几个应用,主要是作为其能力的指示。
在继续之前,我们注意到,由于我们仅考虑对Reissner方程的积分,我们忽略了一些重要主题的回顾。因此,对于梁的大挠度历史,除了上述的著作,我们建议读者参阅Antman的论文(Antman,1972),Gorski的综述论文(Gorski,1976)以及Goss的博士论文(Goss,2003)。对于非线性弹性梁解的定性处理,主要参考是Antman的著作(Antman,2005),对于数值处理,我们参考Saje(1991)和Batista和Kosel(2005)。详细文章见第4部分。
📚2 运行结果
部分代码:
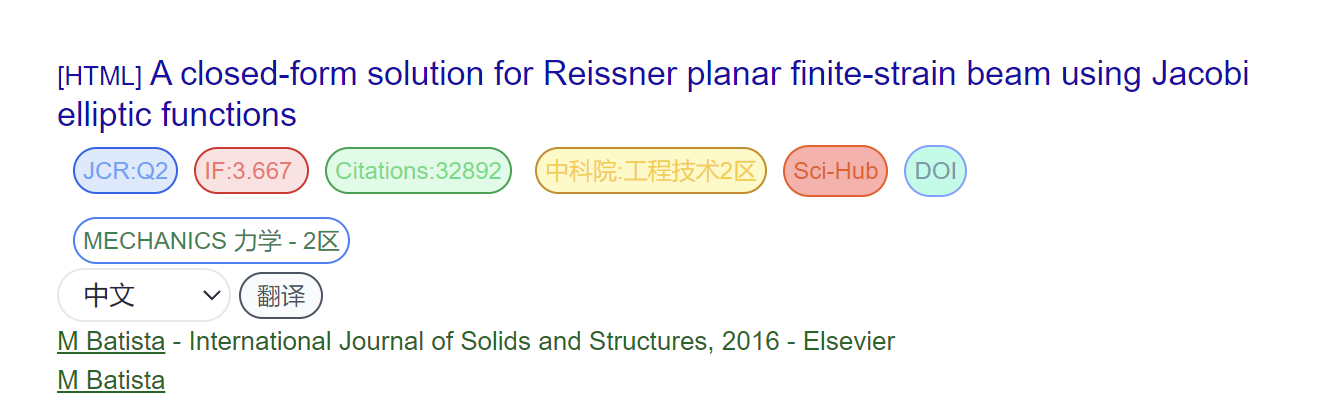
%data
lambda = cc.lambda; % slenderness
mu = cc.mu; % stiffness ratio
alpha = 45; % forcse direction angle in degrees
Fmax = 2; % max force
npts = 100;
nstp = 20; % skip shape
% create 2d object
aa=rod2d('-lambda',lambda,'-mu',mu,'-alphaD',alpha);
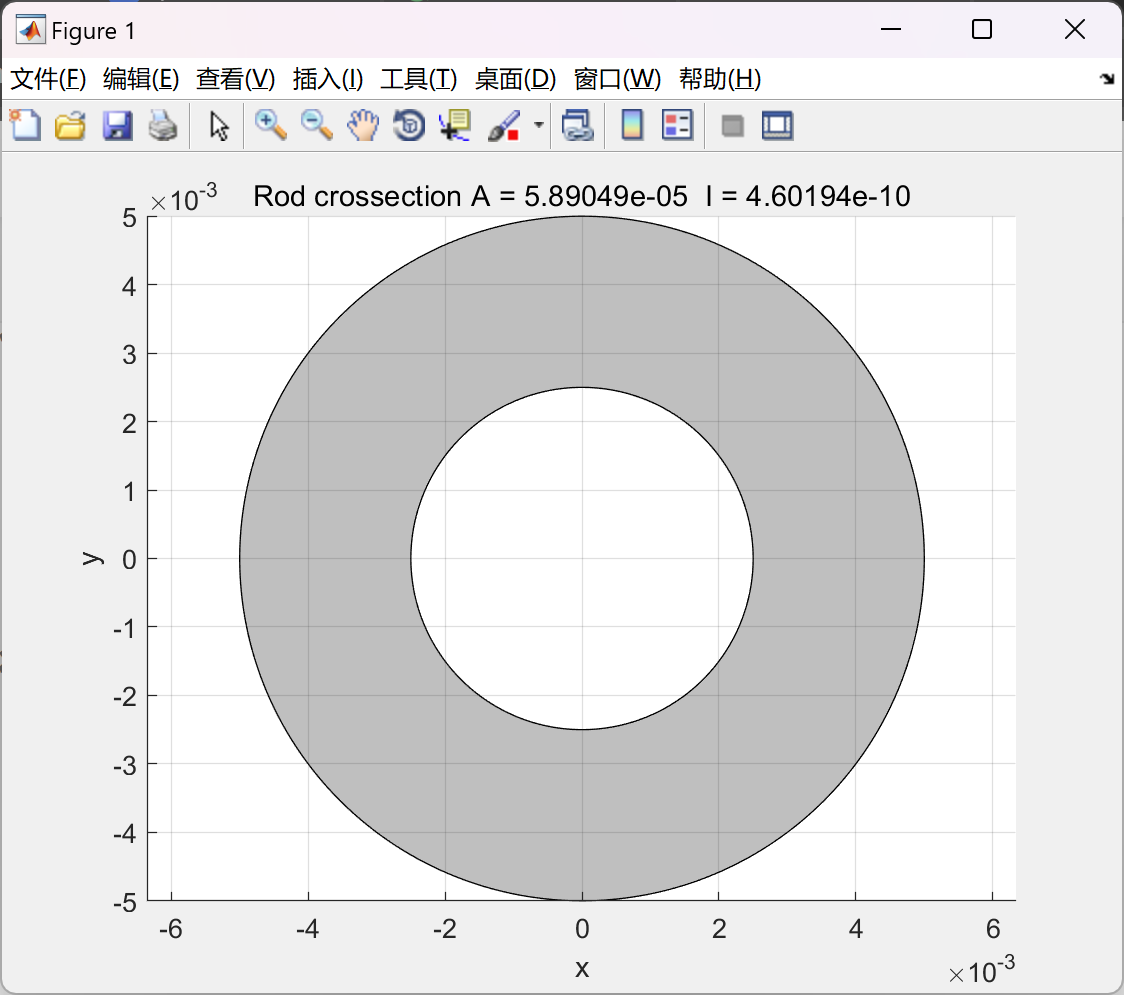
% plot bifurcation diagram, rod shape and phase diagram when end force is
% given
aa.F = 1;
aa.k = 0.99; % clear property !!!
cantBifurcationDiag(aa)
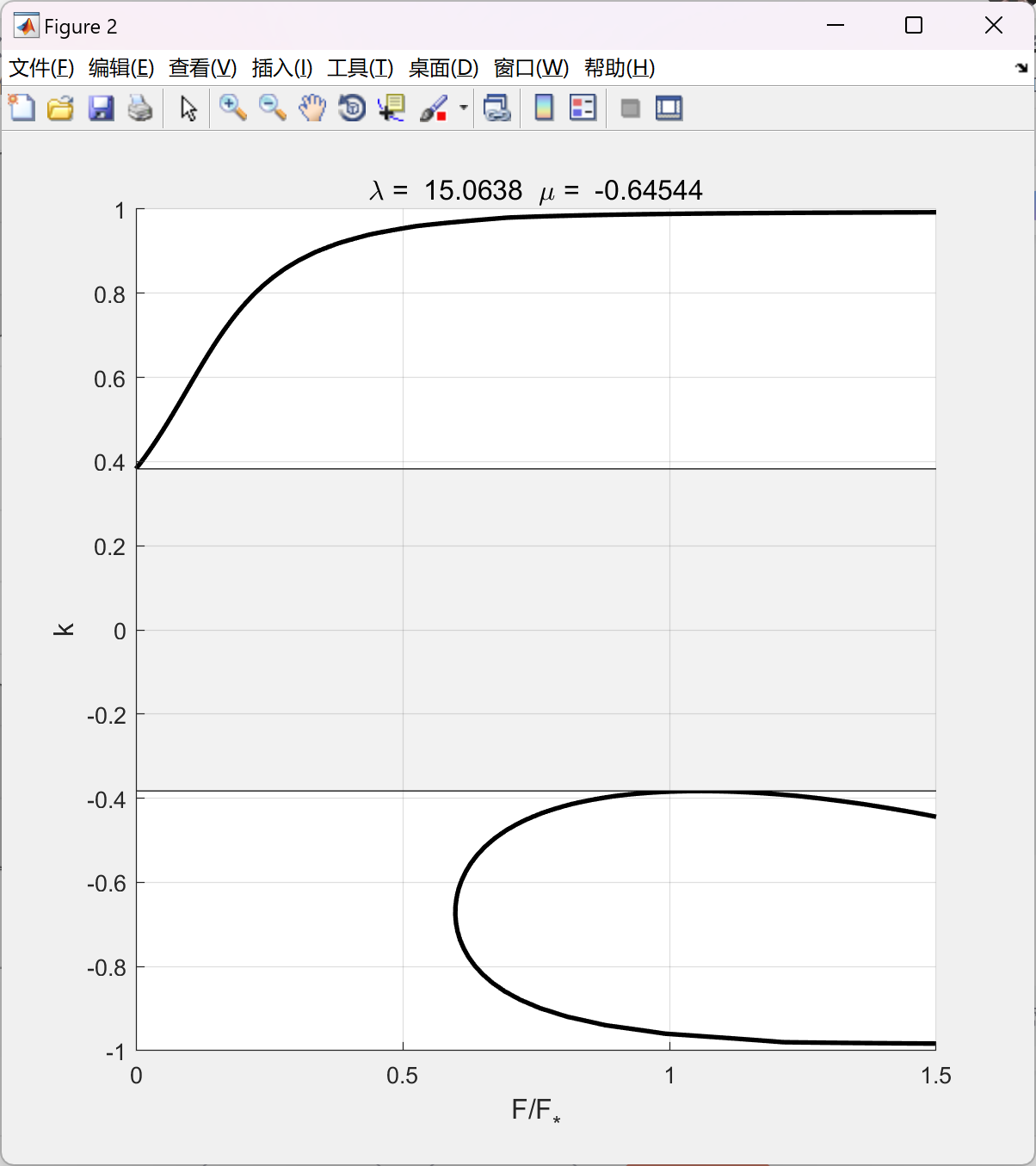
% add graph
graph(aa)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
🌈4 Matlab代码、数据、文章
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











