






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
定义与基本原理:
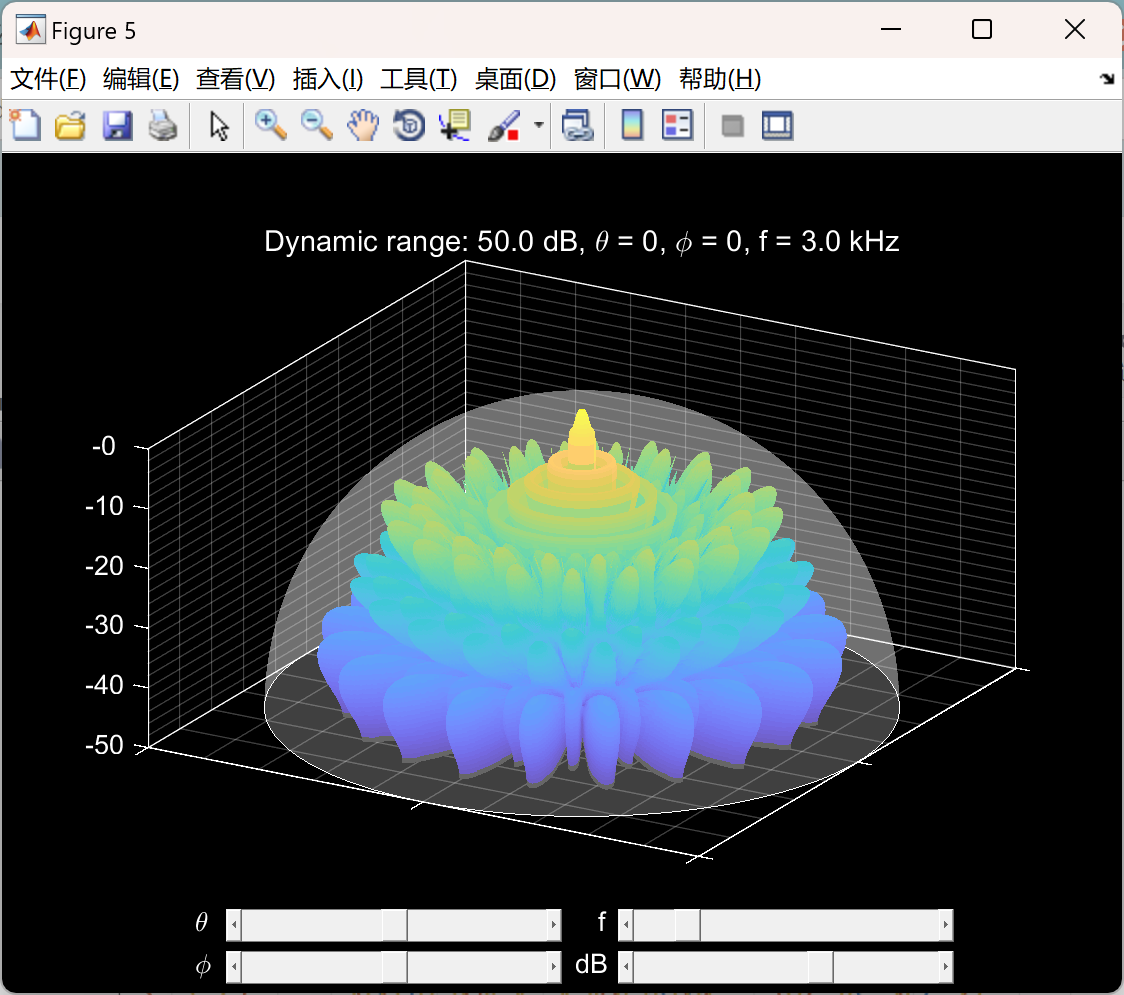
阵列因子:是指天线阵列的方向性函数,它反映了阵列中各个单元相位和幅度加权后的综合效果。阵列因子独立于单个天线单元的特性,只取决于单元之间的相对位置、间距以及馈电相位等参数。
方向图:是阵列因子与单个天线单元的方向图的乘积,表示整个阵列在不同方向上的辐射强度分布情况。方向图直观地展示了阵列在三维空间中的辐射性能。
影响因素:
1. 单元间距:单元之间的物理距离对方向图有显著影响。如果间距过小,会导致阵列的增益受限;若间距过大,则可能产生旁瓣(side lobes),即除主瓣外的其他较强辐射方向。
2. 相位分布:通过调整每个单元的馈电相位,可以控制阵列的最大辐射方向,实现波束扫描等功能。
3. 阵列形状:不同形状的阵列(如线性、平面、圆形等)会影响其方向图的特性。例如,线性阵列适合形成窄波束,而平面阵列则能提供更复杂的波束形状。
4. 单元数量:增加单元数量通常可以提高阵列的增益和分辨率,但也增加了设计复杂度和成本。
应用场景:
无线通信:在5G及未来移动通信技术中,大规模MIMO(多输入多输出)技术利用大型天线阵列来提高数据传输速率和连接可靠性。
雷达系统:通过精确控制阵列因子,雷达系统能够实现高精度的目标定位和跟踪。
卫星通信:卫星天线阵列需要精确的方向图以确保地面站与卫星之间有效且稳定的通信链路。
生物医学工程:在某些医疗成像技术中,如超声波成像,使用天线阵列可以改善图像质量和分辨率。
总之,任意形状离散阵列的阵列因子和方向图研究不仅涉及基础的电磁理论,还紧密关联着现代通信、雷达、遥感等多个领域的应用发展。随着科技的进步,对这些特性的深入理解和优化设计将为新技术的实现提供重要支持。
📚2 运行结果
主函数部分代码:
%% Examples on how to calculate array factor / beampattern
%% Create 2D array
% Position of sensors and weighting of 2D array
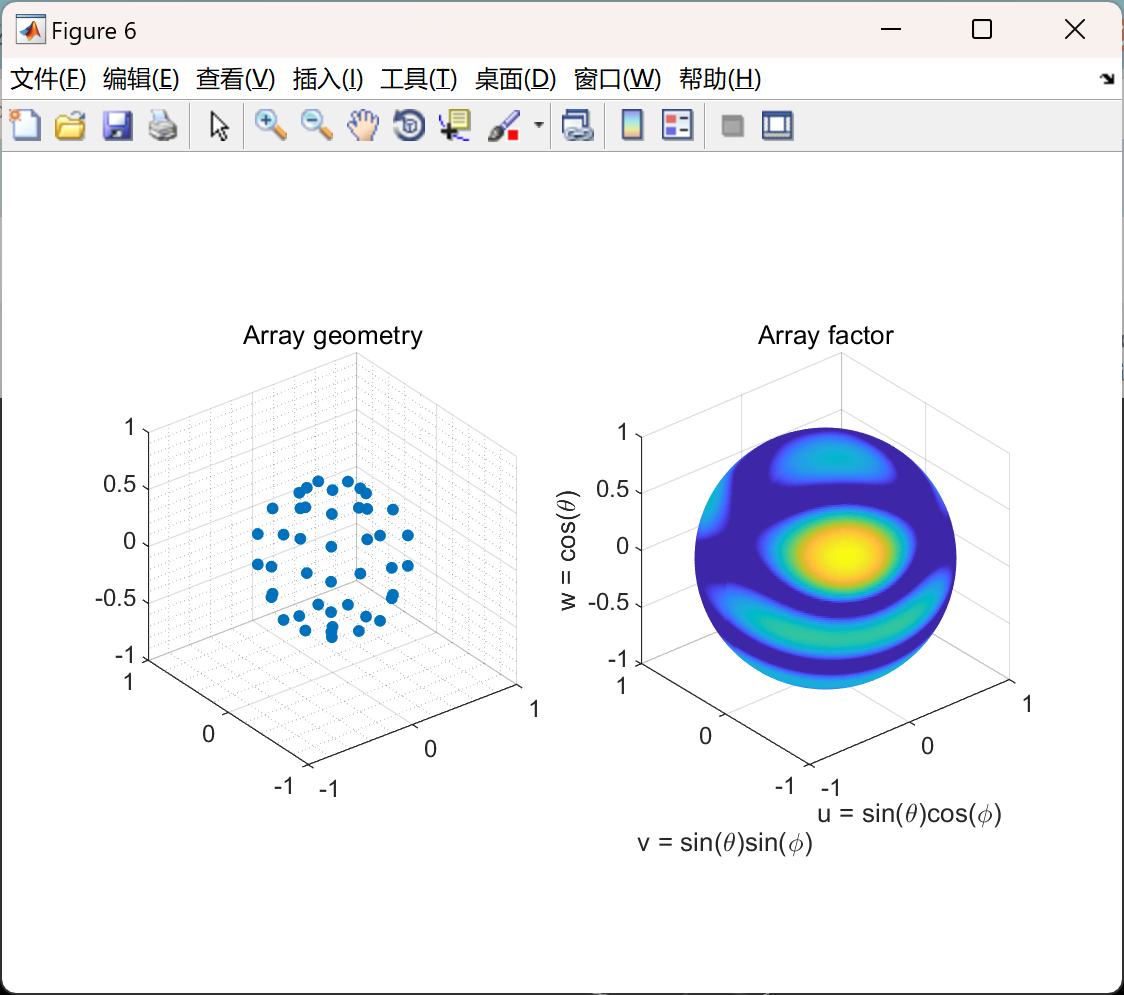
% Create circular array
nElements = 20;
radius = 0.6;
[xPos, yPos] = pol2cart(linspace(0,2*pi-2*pi/nElements,nElements),ones(1,nElements)*radius);
zPos = zeros(1, numel(xPos));
elementWeights = ones(1, numel(xPos))/numel(xPos);
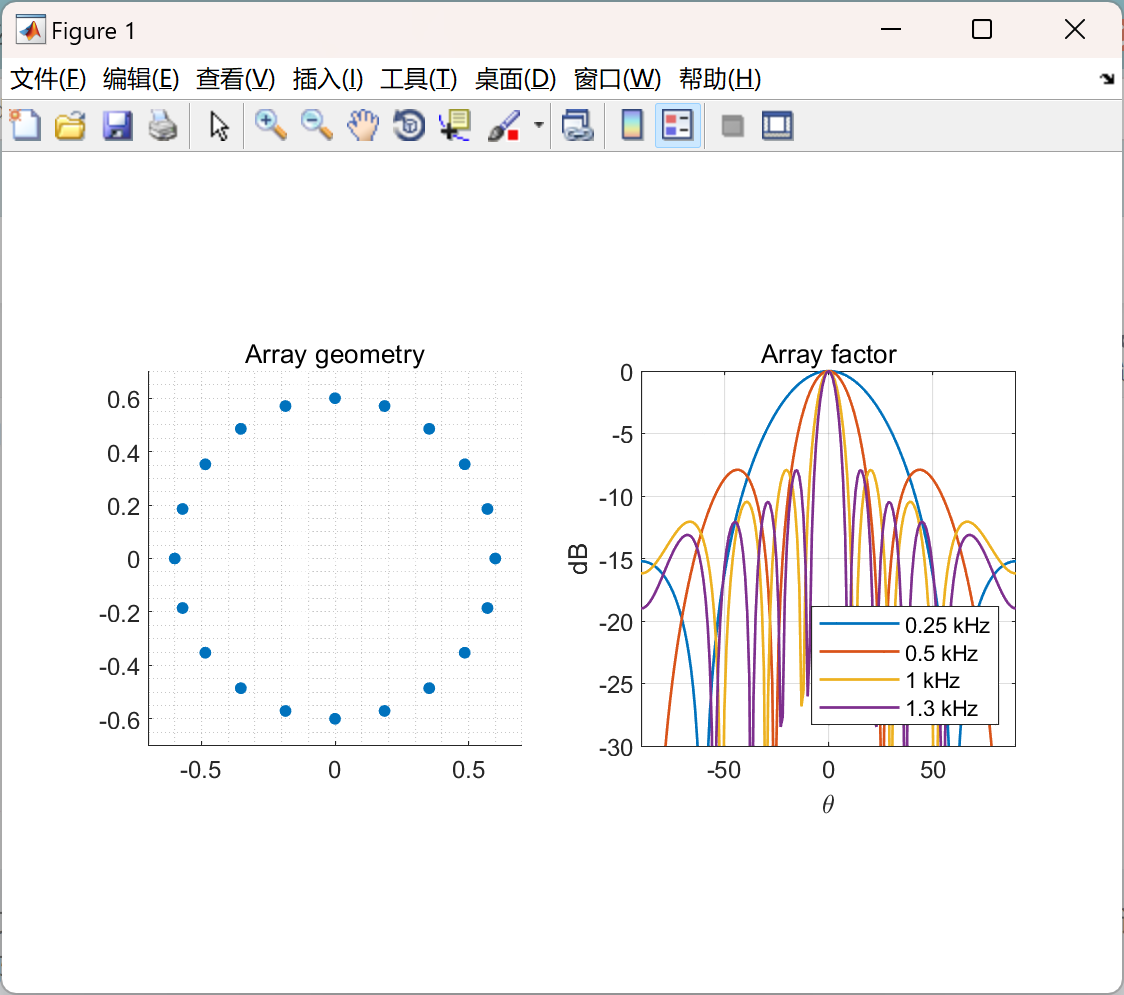
%% Plot array geometry and array factor for different frequencies
% Wave-frequency and wave-speed
f = [250 500 1e3 1.3e3];
c = 340;
% Scanning angles
thetaScanningAngles = -90:90;
phiScanningAngles = 0;
%Calculate and plot the array pattern for various frequencies
fig = figure;
fig.Color = 'w';
axGeometry = subplot(121, 'Parent', fig);
scatter(axGeometry, xPos, yPos, 20, 'filled')
title(axGeometry, 'Array geometry','FontWeight','Normal')
axis(axGeometry, [-radius-0.1 radius+0.1 -radius-0.1 radius+0.1])
axis(axGeometry, 'square')
grid(axGeometry, 'minor')
axResponse = subplot(122, 'Parent', fig);
for ff = f
AF = arrayFactor(xPos, yPos, zPos, elementWeights, ff, c, thetaScanningAngles, phiScanningAngles);
AF = 20*log10(AF);
plot(axResponse, thetaScanningAngles, AF, 'LineWidth', 1, 'DisplayName', [num2str(ff*1e-3) ' kHz']);
hold on
end
xlabel(axResponse, '\theta')
ylabel(axResponse, 'dB')
axis(axResponse, 'square')
grid(axResponse, 'on')
title(axResponse, 'Array factor', 'FontWeight', 'Normal')
axis(axResponse, [thetaScanningAngles(1) thetaScanningAngles(end) -30 0])
legend(axResponse, 'show', 'Location','SouthEast')
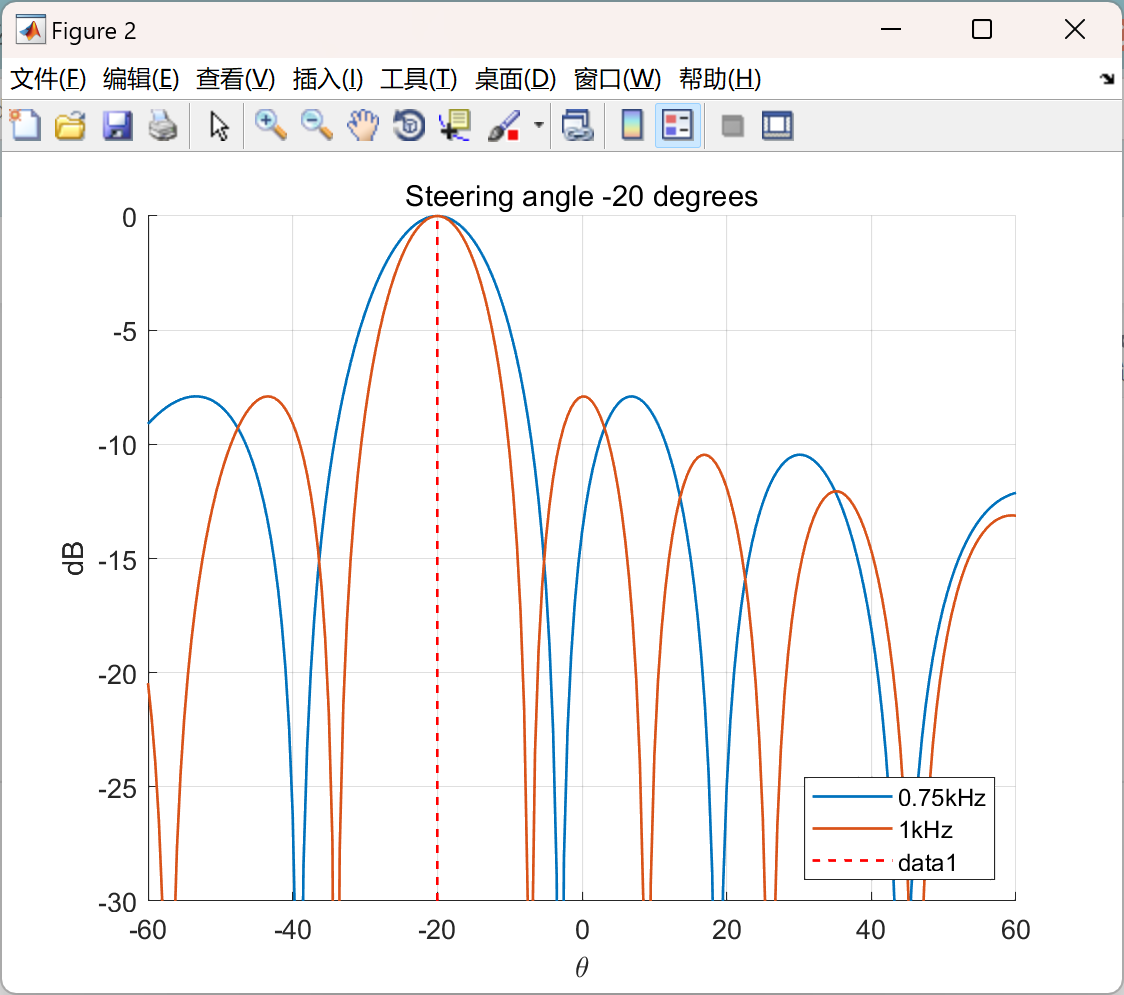
%% Plot with steering
% Wave-frequency and wave-speed
f = [750 1e3];
c = 340;
% Scanning angles
thetaScanningAngles = -60:0.5:60;
phiScanningAngles = 0;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]邱磊,杨君,朱卫纲.某型相控阵雷达模拟训练系统设计与实现[J].科技与创新,2024,(20):53-56.DOI:10.15913/j.cnki.kjycx.2024.20.013.
[2]刘艳中,黄玉宁,周嘉健,等.X波段相控阵天气雷达运行前后天线主要技术指标对比[J].气象水文海洋仪器,2024,41(05):9-12.DOI:10.19441/j.cnki.issn1006-009x.2024.05.010.
🌈4 Matlab代码实现





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











