






图像锐化作为图像处理中的关键技术,旨在增强图像中细节和边缘的清晰度,以提高图像的整体分辨率。图像锐化可以在空间域或频率域中实现。
空间域:常用方法为设定特定的卷积核,对图像进行卷积运算,突出图像的边缘细节特征。
频率域:常用的方法有高通滤波器、拉普拉斯算子等,通过将图像从空间域转换为频率域表示,并对其频率分量进行处理。
本文使用的图像锐化算法在频率域中进行,结合了高通滤波器与高频强调滤波算法实现图像锐化。
算法整体流程如下:
1、对图像进行傅里叶变换:由空间域转换为频率域。
2、使用高通滤波器过滤图像的低频部分。这里解释一下图像的频率形容了像素变化程度,也可以理解为相邻像素值梯度的变化强弱。所以低频部分代表了像素变化较为平坦的区域,高频部分代表像素变化较为强烈的区域,如噪声、边缘部分。因此高通滤波器的作用可以理解为提取图像的边缘特征。
3、使用高频强调滤波:将高通滤波器提取的边缘特征与原始图像进行加权融合,达到锐化的效果。
4、对图像进行逆傅里叶变换:由频率域转换回空间域。
代码如下:
创建好GaoTongLvBo.h头文件,使用时直接调用gaotong(const Mat f)函数即可,入参为待处理图像,输出为锐化后的图像。
#include <opencv2/opencv.hpp>
#include <cmath>
#include <complex>
#include <iostream>
#include "GaoTongLvBo.h"
using namespace cv;
using namespace std;
//将傅里叶变换后矩阵中的低频分量移动到中心
void manualShiftDFT(const Mat& complexI, Mat& complexI_shifted) {
// 获取输入矩阵的大小
int M = complexI.rows;
int N = complexI.cols;
// 创建一个与输入相同大小的输出矩阵
complexI_shifted = Mat::zeros(complexI.size(), complexI.type());
// 遍历输入矩阵的每个元素
for (int i = 0; i < M; i++) {
for (int j = 0; j < N; j++) {
int newRow = (i < M / 2) ? (i + M / 2) : (i - M / 2);
int newCol = (j < N / 2) ? (j + N / 2) : (j - N / 2);
complexI_shifted.at<Vec2d>(newRow, newCol) = complexI.at<Vec2d>(i, j);
}
}
}
//高通滤波实现
Mat gaotonglvbo(const Mat g_shifted, Mat one_minus_h,int M,int N) {
// 应用高通滤波器
Mat result_highpass = Mat::zeros(g_shifted.size(), g_shifted.type());
for (int i = 0; i < g_shifted.rows; i++) {
for (int j = 0; j < g_shifted.cols; j++) {
Vec2d g_val = g_shifted.at<Vec2d>(i, j);
double h_val = one_minus_h.at<double>(i, j); // 注意:这里应该是单通道,但如果是复数则应该使用Vec2d
// 假设one_minus_h也是复数矩阵,如果是实数则需要相应调整
Vec2d result = Vec2d(g_val[0] * h_val, g_val[1] * h_val);
result_highpass.at<Vec2d>(i, j) = result;
}
}
return result_highpass;
}
//创建滤波器
Mat lvboqi(int M,int N) {
// 定义高通滤波器的截止频率
double D0 = 40;
// 创建滤波器
Mat H = Mat::zeros(M, N, CV_64F);
for (int i = 0; i < M; i++) {
for (int j = 0; j < N; j++) {
double D = sqrt(pow(i - M / 2.0, 2) + pow(j - N / 2.0, 2));
H.at<double>(i, j) = exp(-(D * D) / (2 * (D0 * D0)));
}
}
return H;
}
//高通高频滤波整体算法
Mat gaotong(const Mat f) {
int m = f.rows;
int n = f.cols;
int M1 = getOptimalDFTSize(f.rows);
int N1 = getOptimalDFTSize(f.cols);
Mat padded;
copyMakeBorder(f, padded, 0, M1 - f.rows, 0, N1 - f.cols, BORDER_CONSTANT, Scalar::all(0));
// 将图像转换为浮点型
Mat I;
padded.convertTo(I, CV_64F);
// 进行二维傅里叶变换
Mat g;
dft(I, g, DFT_COMPLEX_OUTPUT);
// 将零频率分量移到中心
Mat g_shifted;
manualShiftDFT(g, g_shifted);
// 获取矩阵尺寸
int M = g_shifted.rows;
int N = g_shifted.cols;
// 高通滤波与高频强调滤波结合,高频强调滤波
Mat F = Mat::zeros(M, N, CV_64F);
F = 0.5 + 0.75 * (1 - lvboqi(M, N));
Mat result_highpass2 = gaotonglvbo(g_shifted, F, M, N);
// 将零频率分量移回原位
Mat G_shifted;
manualShiftDFT(result_highpass2, G_shifted);
// 进行逆傅里叶变换
Mat J2;
idft(G_shifted, J2, DFT_SCALE | DFT_REAL_OUTPUT);
// 提取原始大小的部分
cv::Mat J3 = J2(Rect(0, 0, n, m)); // 注意:Rect的宽和高参数是列数和行数
// 取绝对值并转换为uint8
Mat J4;
magnitude(J3.rowRange(0, J3.rows).colRange(0, J3.cols),
Mat::zeros(J3.rows, J3.cols, J3.type()), J4); // 注意:magnitude需要两个输入矩阵
J4.convertTo(J4, CV_8U);
return J4;
}锐化效果:
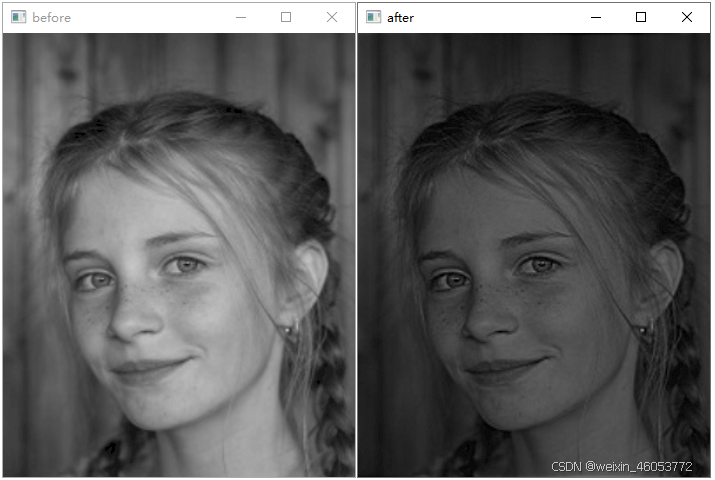
可以看出图像的边缘细节信息得到有效增强,处理后的图像变暗,可以结合自适应直方图均衡化算法进行对比度增强。

















 5576
5576

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









