






关于高频脉振注入法基本原理见《基于随机相位高频方波电压注入法的电机无传感器控制(一)》
三.高频正弦波注入法
在理解高频脉振注入法的基本原理后,以高频正线波注入法为例,介绍从注入到观测再到控制电机运行的基本建模流程,模型参考https://blog.csdn.net/weixin_44312889/article/details/121799846。
1.传统矢量控制
高频注入法是基于普通的电机矢量控制模型进行的,传统有的电机控制simulink模型框图如下
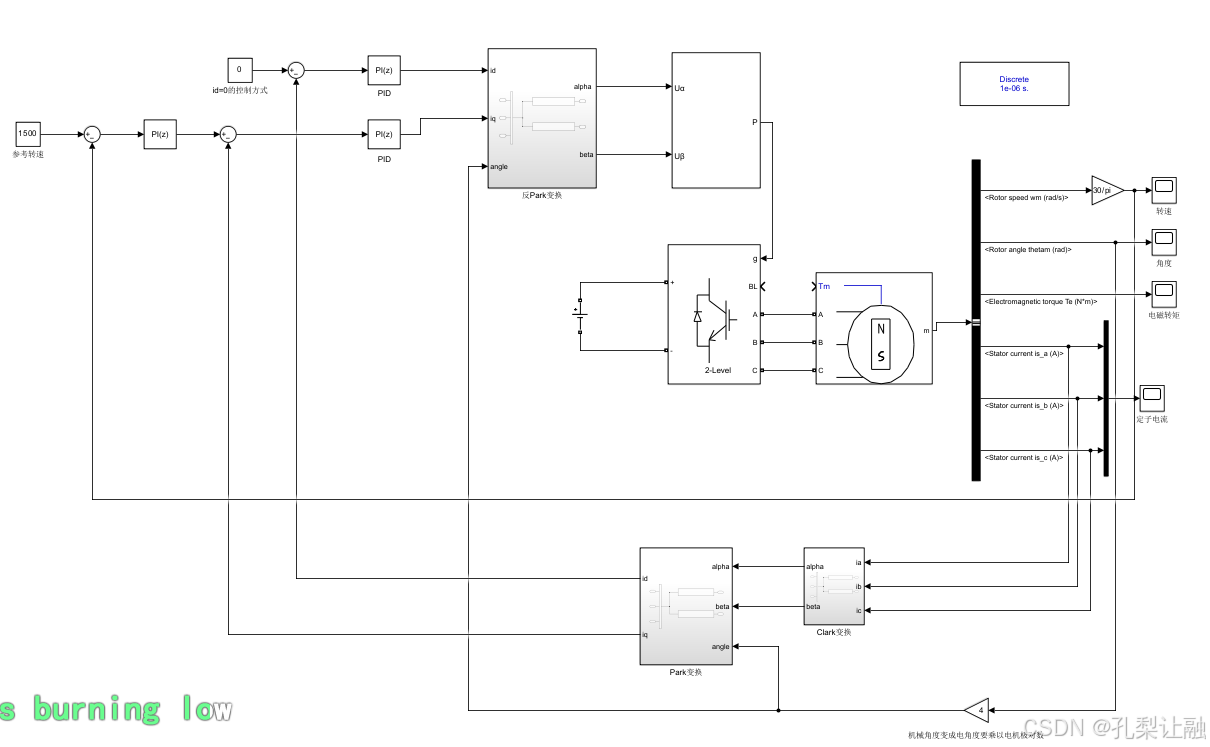
简单介绍一下控制流程:电机的三相电流经过clark变换到两相静止坐标系下,再经过park变换到两相旋转坐标系下,采用id=0的控制方式,根据参考转速控制iq电流使电机的转速达到参考转速,id和iq经过反park变换再到两相静止坐标系,经过SVPWM调制给控制电机。
这其中,park变换和反park变换需要用到电机的位置信息,传统的电机控制中,位置信息通过传感器得到,但在恶劣的工作环境下,传感器有损坏的风险,这也是无传感器控制出现的原因,我们现在要做的就是如何把传感器得到的位置信息替换为我们观测到的估计位置信息用于电机控制。
2.脉振高频正弦电压注入法
- 信号注入
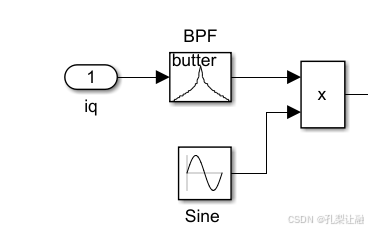
根据脉振电压注入法的原理可知,我们要在id轴注入高频正弦电压信号,其原理框图如下
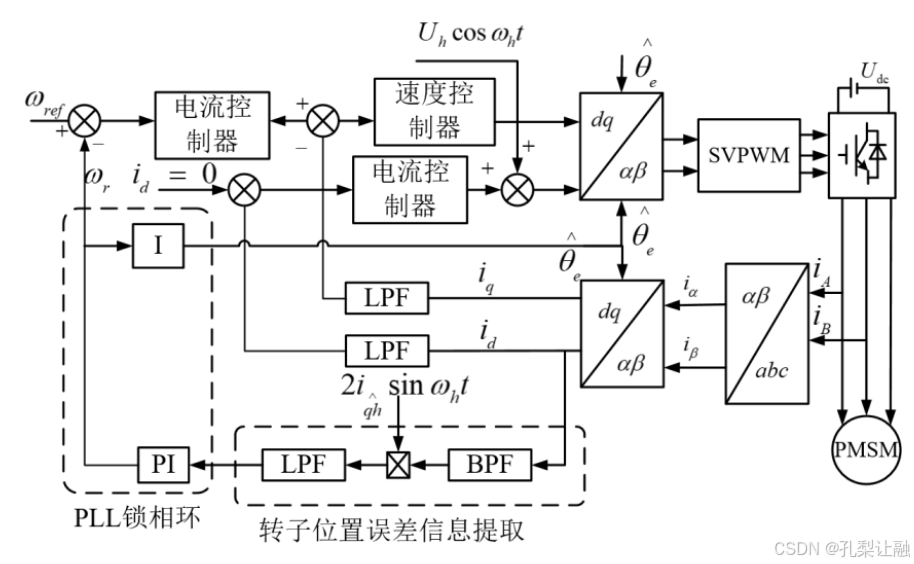
根据这个原理框图,搭建simulink模型
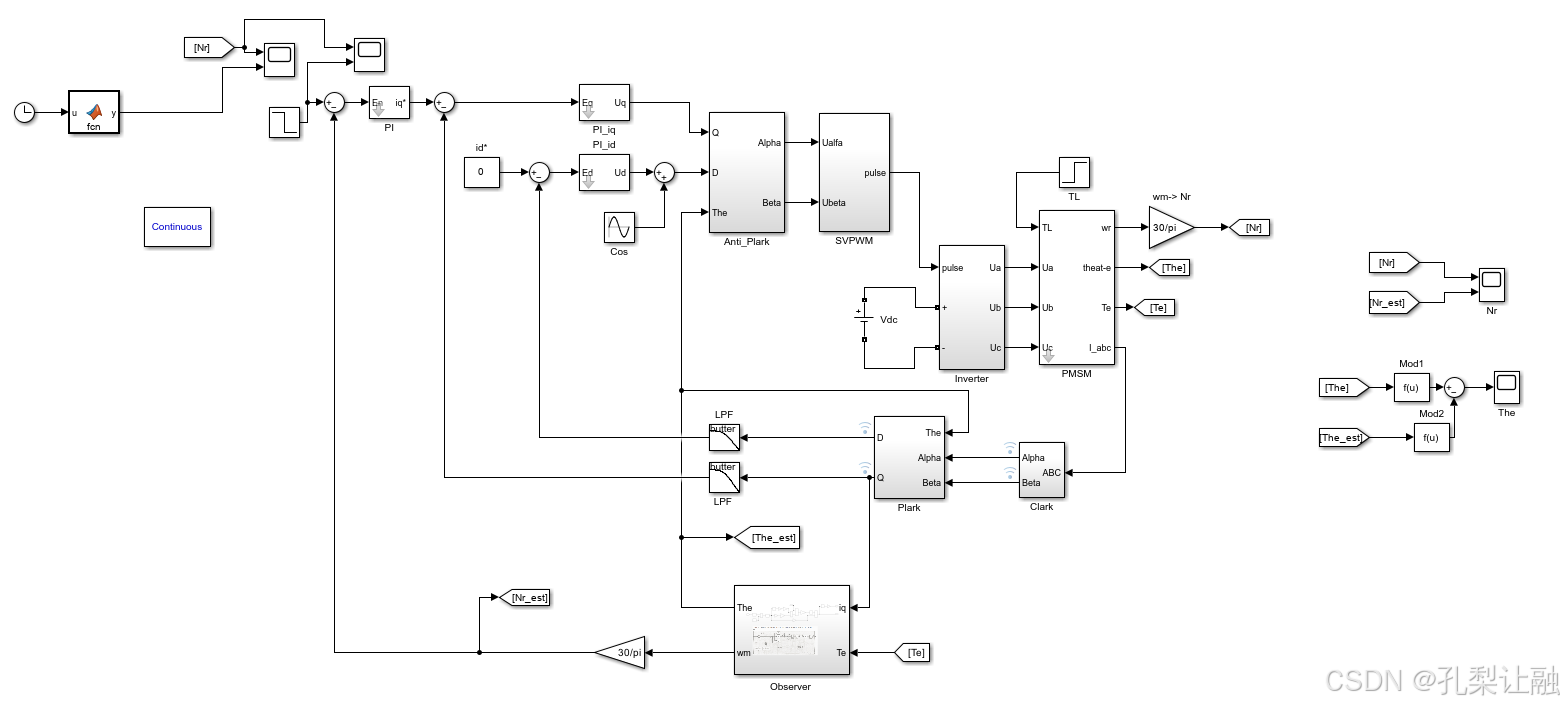
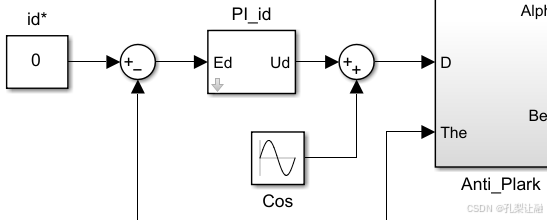
在simulink中的注入,就是简单的信号叠加即可,这里要注意的是叠加的高频信号频率和幅值的选择,注入的频率不能太高,当高频信号的频率接近功率器的开关频率时,会增加电机的损耗,且较高的注入频率会导致转子位置信息幅值过小,影响电流检测精度;注入的频率也不能太低,当高频信号的频率接近电机运行频率时,会严重影响电机的矢量控制,也很难提取到高频响应电流进行解调。因此工程上选择注入信号的频率要远大于电机运行频率,一般选择开关频率的一半。
注入信号的幅值过大也会影响矢量控制,过小也会影响转子位置信息的观测,因此注入幅值要在不影响矢量控制的前提下尽可能大。
- 信号提取
在注入高频电压信号后,要对电机的响应电流进行分离,响应电流主要分为两部分:一是高频电压响应出来的高频电流,二是电机控制中的基波电流,因为高频响应电流的频率远大于基波电流频率,所以可以通过滤波器来进行二者的分离。
采用低通滤波器提取基波电流,使其正常参与电机控制。
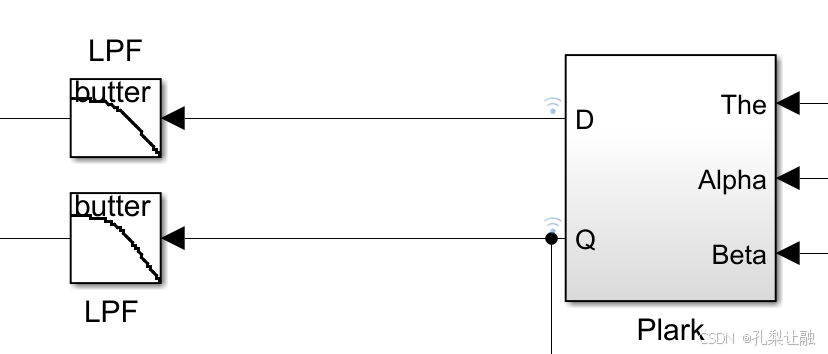
采用带通滤波器提取高频响应电流进行解调
- 信号解调
提取出来的高频响应电流,要对其进行解调得到位置信息,一种是通过PLL锁相环,另一种是通过位置观测器,具体的解调过程在https://blog.csdn.net/weixin_44312889/article/details/121799846中有较为详细的解释,该模型采用的是位置观测器的方法。
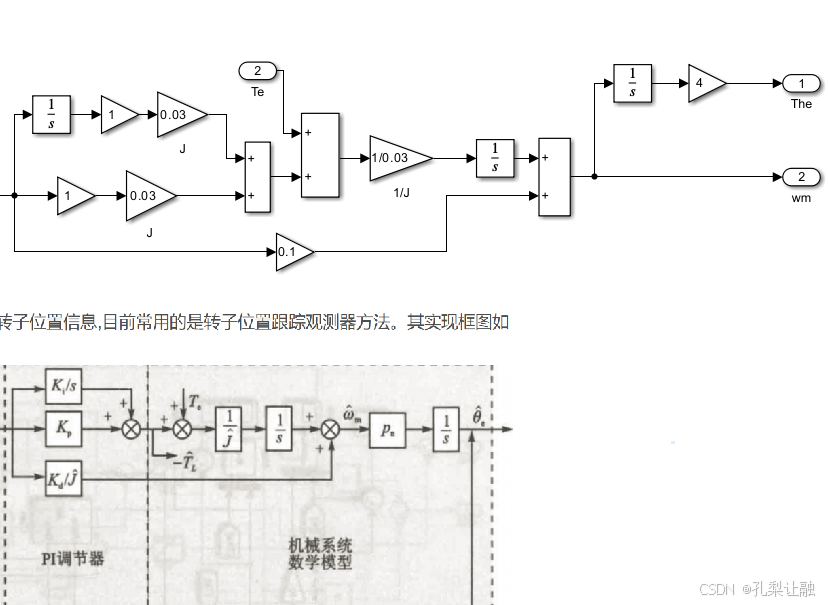
位置观测器是利用了电机的机械方程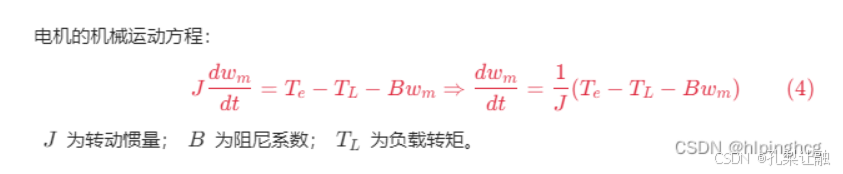
3.仿真结果及分析
- 工况设置
运用函数的方式进行工况设置,更加灵活,代码如下
function y = fcn(u)
y=0;
if(u<=0.2)
y=500*u;
elseif(u>0.2)&&(u<=3)
y=100;
elseif(u>3)&&(u<=4)
y=100*u-200;
elseif(u>4)&&(u<=5)
y=200;
elseif(u>5)&&(u<=7)
y=-150*u+950;
else
y=-100;
end
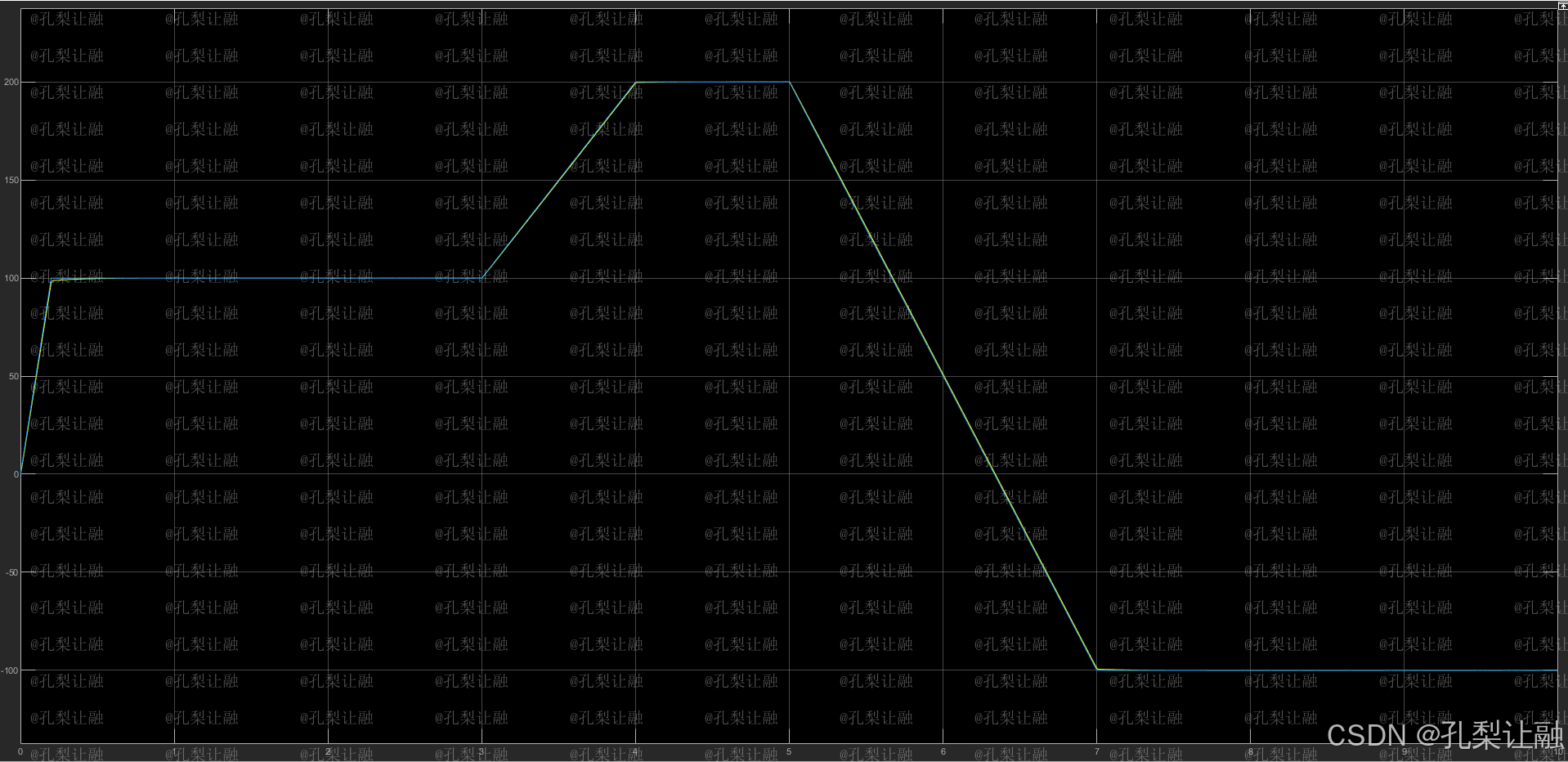
按照设定工况运行转速结果如下,蓝色线为设定工况,黄色线为电机转速工况,可以看出跟随性能还是比较好的。
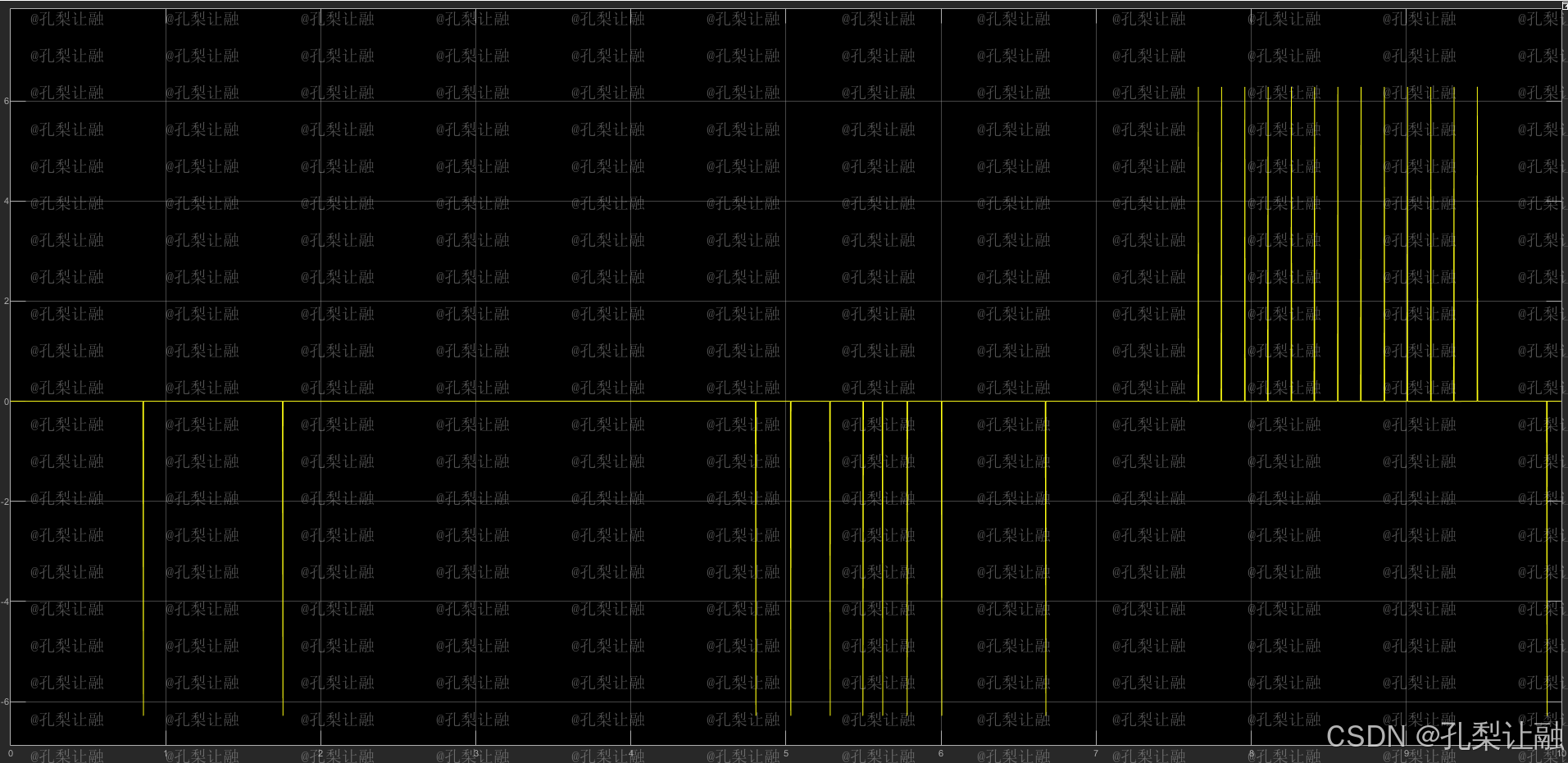
估计转子位置与实际转子位置之间的误差结果如下,只有一部分的超前或滞后的情况,这个结果好的有点不太真实。
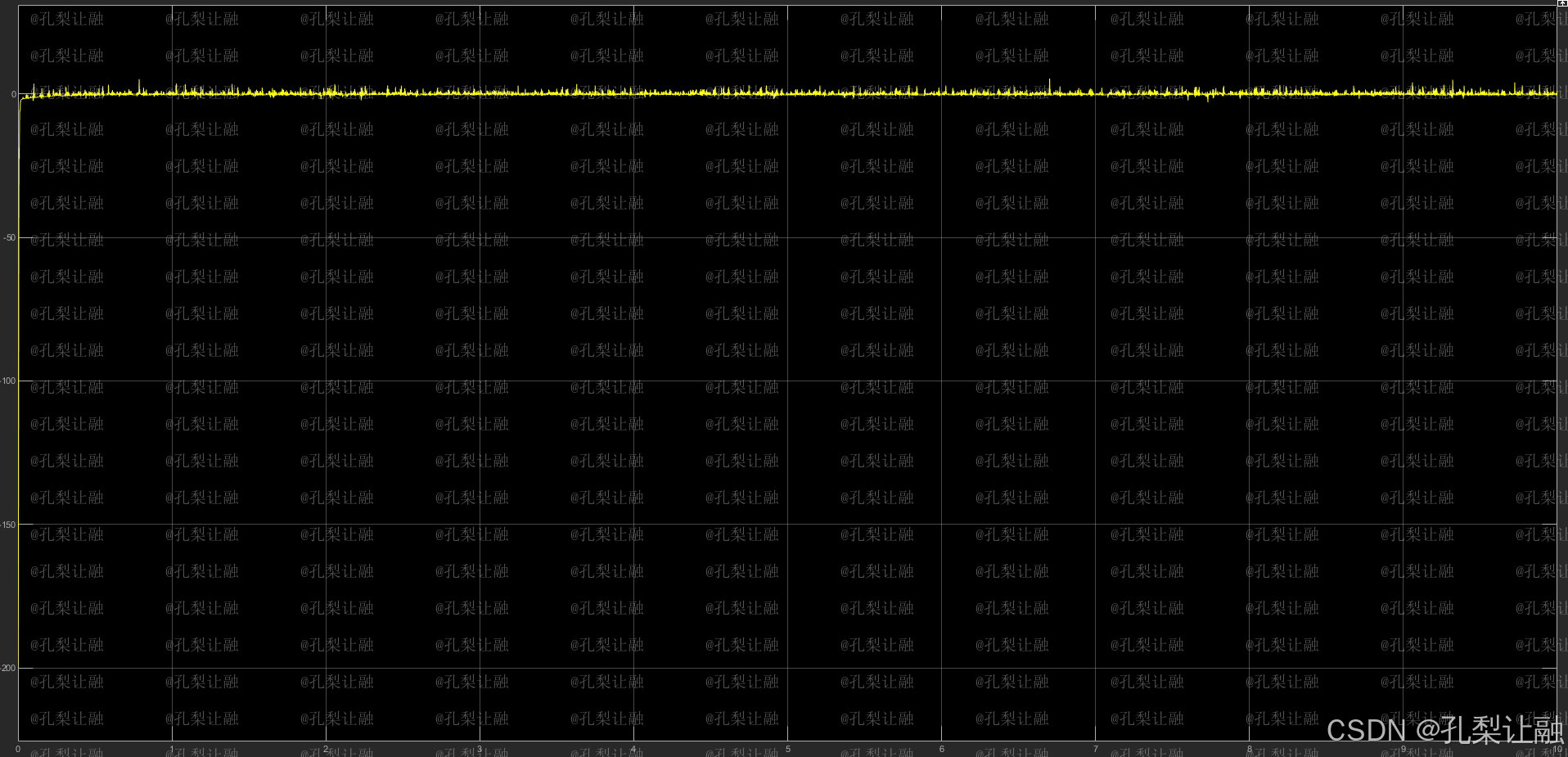
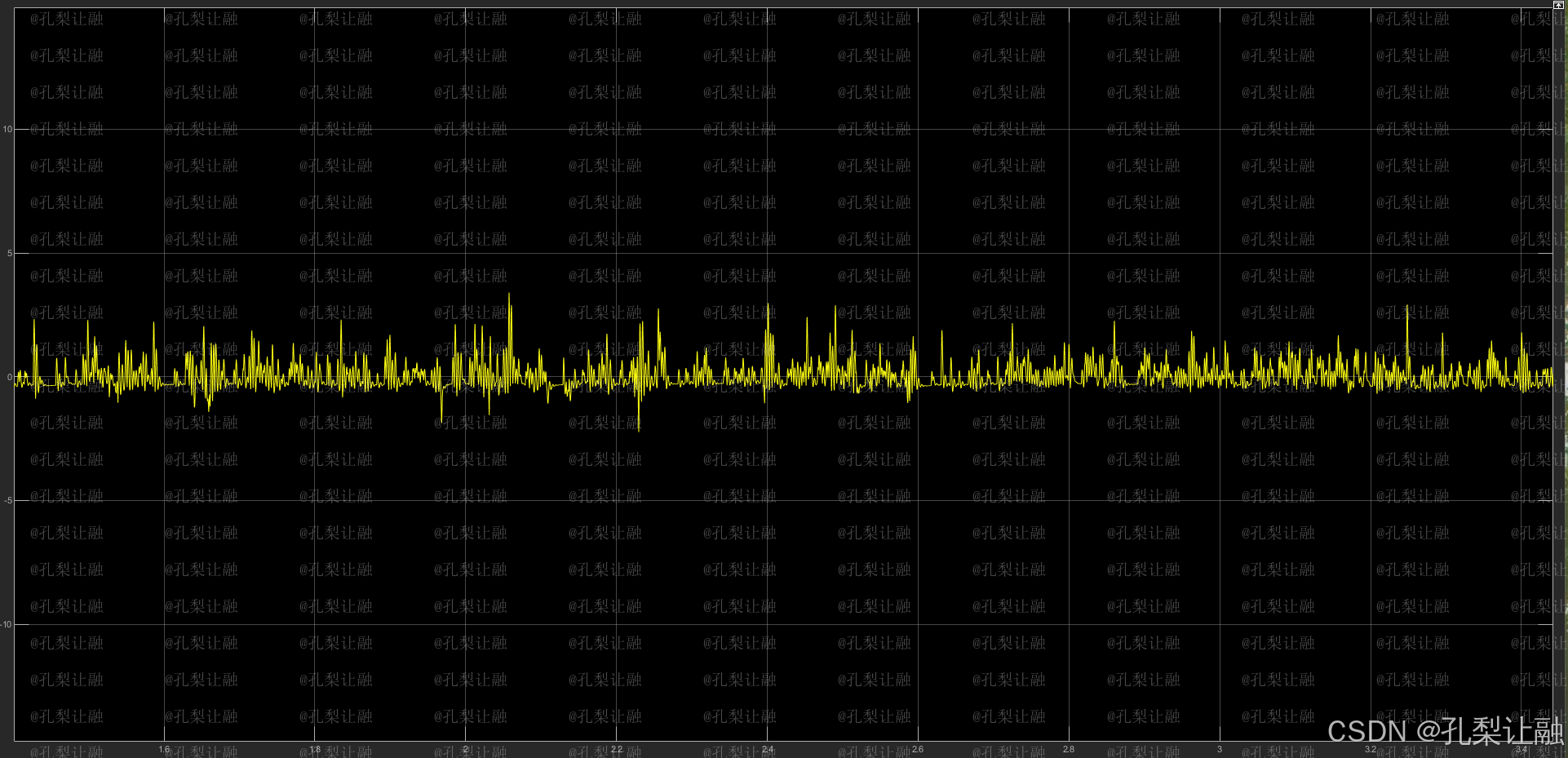
直接设置一个200的转速进行仿真查看结果,下图为估计转速与实际转速之间的误差,放大以后可以看到,误差基本在5左右,这是可以接受的程度。
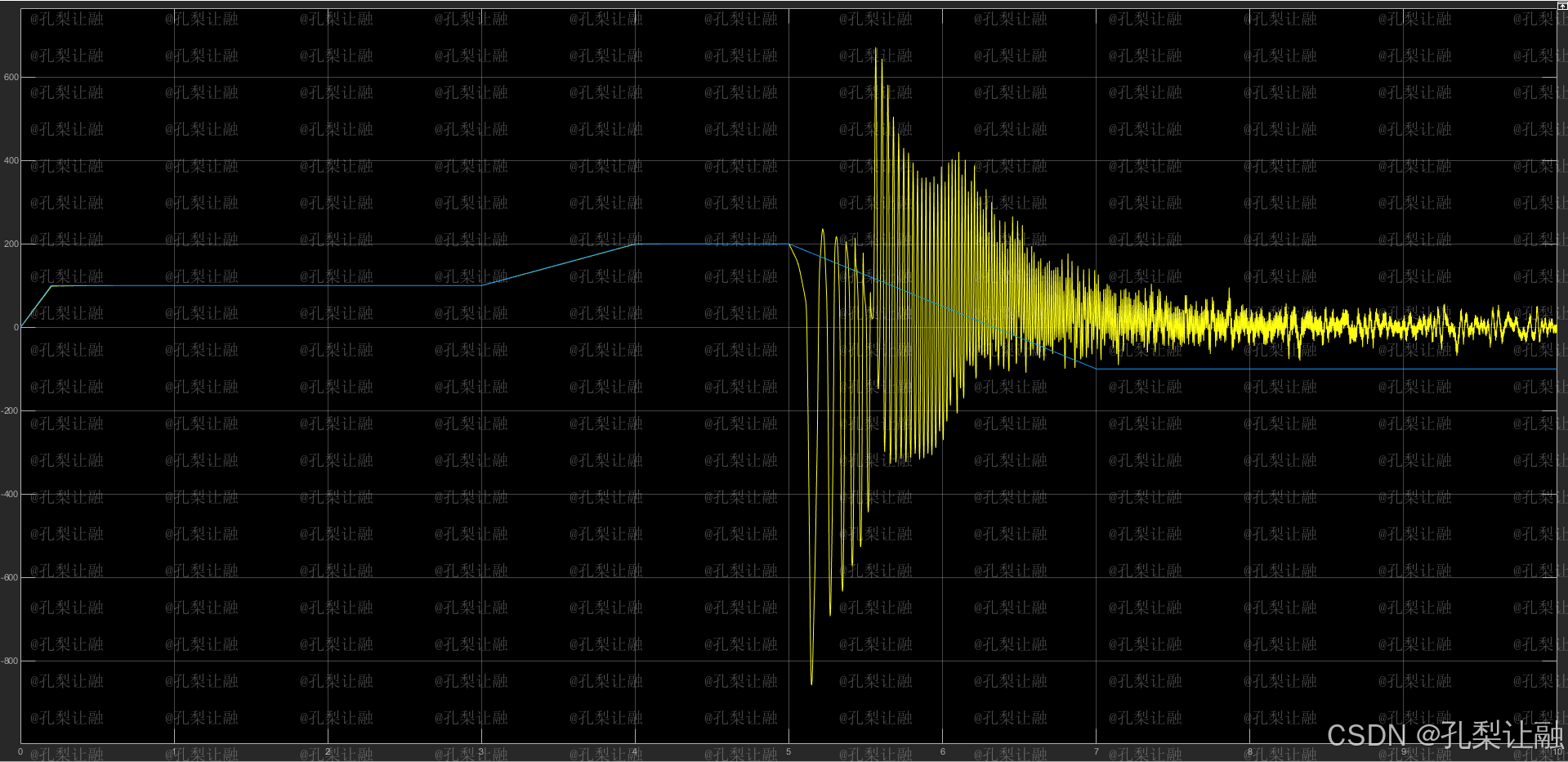
以上结果基本验证该模型具有一定的无传感器控制电机的能力,但该工况均是在没有负载的情况下仿真的,因此在5秒处叠加一个数值为2的负载,进行仿真,结果如下。可以看出,在添加负载以后,转速跟随结果惨不忍睹,虽然最后有所收敛,但是还是没有完全跟随。究其原因,在高频响应电流信号解调中使用的位置观测器包含有电机的机械运动方程,负载是其中的一个变量,所以带载前的结果和带载后的结果天差地别,需要根据负载的情况重新整定参数,在此不做赘述。
4.总结
本文根据脉振高频注入法的原理,以脉振正弦波注入法为例,介绍了高频注入法的模型搭建仿真的基本流程,并对搭建的模型进行仿真验证,结果表明,该模型在无负载情况下跟随效果极好,可以满足大部分的无传感器控制工况,但在带载情况下需要重新调节参数,大大限制了模型的实用性,可以作为学习的资料参考,加深对脉振高频注入法的理解,在工程上的实际应用价值较小。

















 3103
3103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









