









零基础信号与系统学习笔记:复指数信号、傅里叶变换、三角函数正交性
终于还是躲不过信号与系统,在此记录学习笔记。😉 争取从零开始一遍搞懂
定期更新!!!【2020年4月14日完结】
友链:奥本海姆第三章
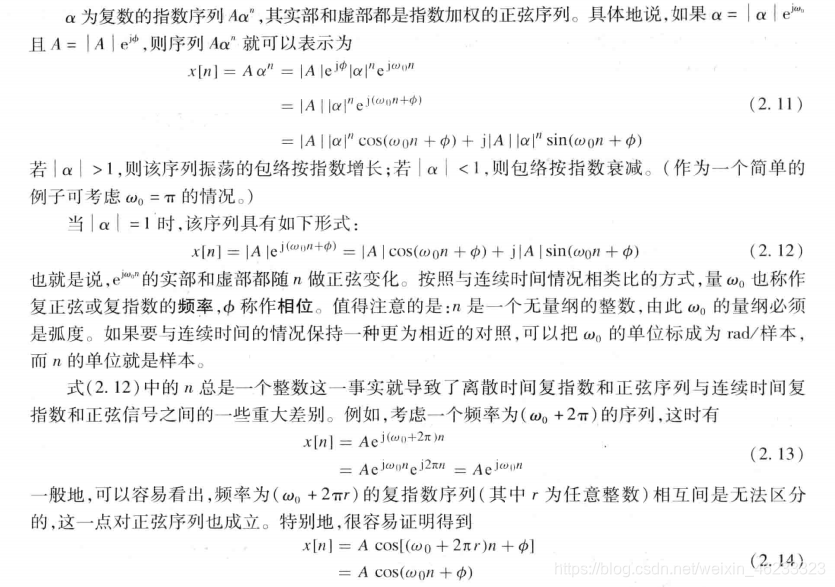
基础1:复指数信号
复指数信号基础知识
- 复指数信号是指数信号的指数因子是复数时,称之为复指数信号。
- 复指数信号在物理上是不可实现的,但是它概括了多种情况。利用复指数信号可以表示常见的普通信号,如直流信号、指数信号、正弦信号等。
- 复指数信号的微分和积分仍然是复指数信号,利用复指数信号可以使许多运算和分析简化。因此,复指数信号是信号分析中非常重要的基本信号。
复指数信号推导1
一般情况下的复指数信号为
f
(
x
)
=
K
e
(
σ
+
j
w
)
t
f(x)=Ke^{(\sigma + jw)t}
f(x)=Ke(σ+jw)t,其中
σ
\sigma
σ表示实部,w表示虚部,K是实数,记复数
s
=
σ
+
j
w
s=\sigma + jw
s=σ+jw,则
f
(
x
)
=
K
e
s
t
f(x)=Ke^{st}
f(x)=Kest。
借助欧拉公式展开:
f ( x ) = K e ( σ + j w ) t = K e σ t + j w t = K e σ t ( c o s ( w t ) + j s i n ( w t ) ) f(x)=Ke^{(\sigma + jw)t}=Ke^{\sigma t+jwt}=Ke^{\sigma t}(cos(wt)+jsin(wt) ) f(x)=Ke(σ+jw)t=Keσt+jwt=Keσt(cos(wt)+jsin(wt))
此结果表明:
- 一个复指数信号可分为实、虚两部分。
- 实部包含余弦信号,虚部则为正弦信号。指数因子实部 σ \sigma σ表表示振幅随时间变化的情况.
- 指数因子的虚部w表示角频率
相应的,结题技巧有:
cos
(
n
cos
t
)
=
1
2
(
e
j
w
0
t
+
e
−
j
w
0
t
)
\cos (n \cos t)=\frac{1}{2}\left(e^{j w_{0} t}+e^{-j w_{0} t}\right)
cos(ncost)=21(ejw0t+e−jw0t)
虚指数信号
当振幅不随时间变化时, σ = 0 \sigma=0 σ=0,则信号是 e j w t e^{jwt} ejwt,称为虚指数信号。
- 虚指数信号形式,为等幅正弦信号。
- 具有周期性,其周期为2π/ω;
虚指数信号特性和作用
∣ e j w t ∣ = c o s 2 ( w t ) + s i n 2 ( w t ) = 1 |e^{jwt}|=cos^2(wt)+sin^2(wt)=1 ∣ejwt∣=cos2(wt)+sin2(wt)=1,即一个周期复指数信号 e j w t e^{jwt} ejwt的绝对值的平方等于1。
如果把虚指数信号作为控制系统的输入函数,那么系统的输出也应当是一个复数,输出的实部与输入的实部:cos(wt)相对应;输出的虚部与输入的虚部:sin(wt)相对应。
作用:
输入一个复指数函数,输出也是复指数,此时可以计算系统输出的振幅(
(
响
应
实
部
2
+
响
应
虚
部
2
)
\sqrt{(响应实部^2+响应虚部^2)}
(响应实部2+响应虚部2))和相位
w
w
w。
直流信号
当 σ = 0 且 w = 0 \sigma=0 且w=0 σ=0且w=0时,即s=0,此时信号退化为直流信号。
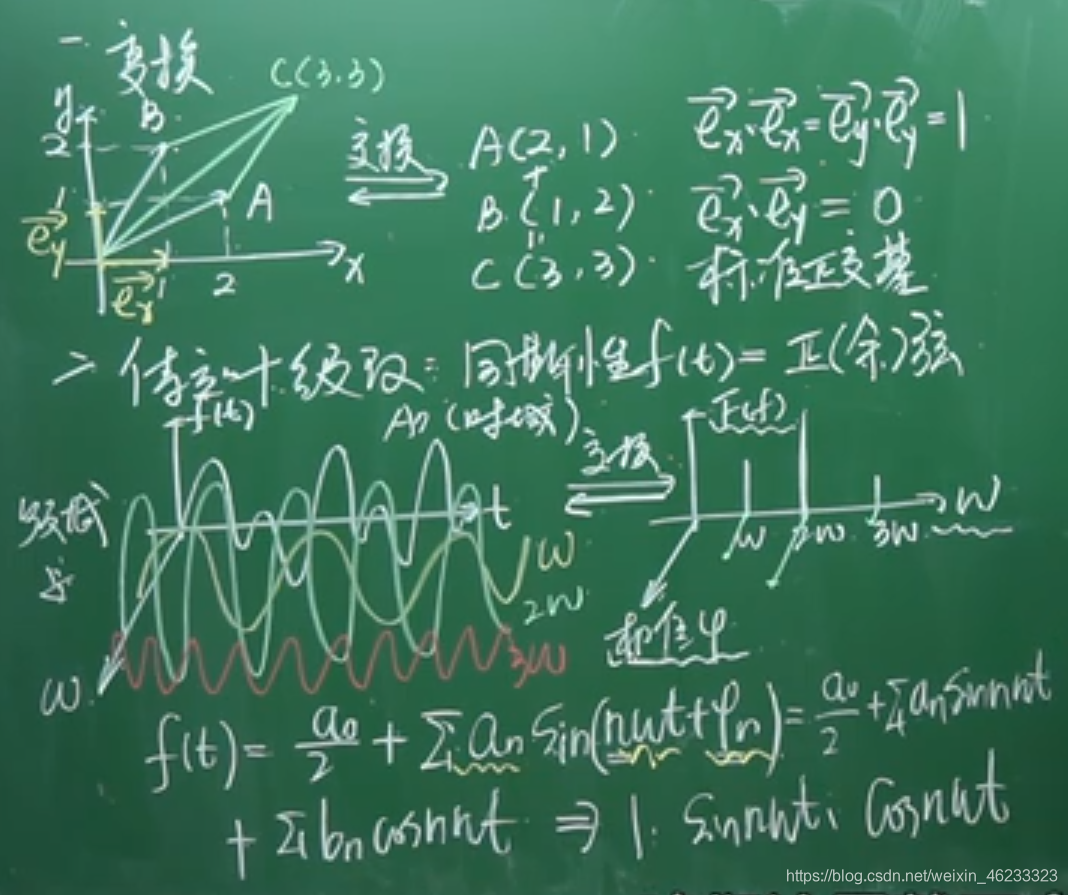
基础2:傅里叶级数
任何周期函数都可以用正弦函数和余弦函数构成的无穷级数来表示,这个级数就称为傅里叶级数
X
(
t
)
=
a
0
+
∑
n
=
1
∞
[
a
n
cos
(
n
ω
t
)
+
b
n
sin
(
n
ω
t
)
]
=
a
0
+
∑
n
=
1
∞
c
n
sin
(
n
ω
t
+
θ
n
)
=
a
0
+
c
1
sin
(
ω
t
+
θ
1
)
+
c
2
sin
(
2
ω
t
+
θ
2
)
+
⋯
n
=
1
,
2
,
⋯
\boxed{\begin{aligned} X(t)=& a_{0}+\sum_{n=1}^{\infty}\left[a_{n} \cos (n \omega t)+b_{n} \sin (n \omega t)\right]=\\ & a_{0}+\sum_{n=1}^{\infty} c_{n} \sin \left(n \omega t+\theta_{n}\right)=\\ & a_{0}+c_{1} \sin \left(\omega t+\theta_{1}\right)+c_{2} \sin \left(2 \omega t+\theta_{2}\right)+\cdots \\ & n=1,2, \cdots \end{aligned}}
X(t)=a0+n=1∑∞[ancos(nωt)+bnsin(nωt)]=a0+n=1∑∞cnsin(nωt+θn)=a0+c1sin(ωt+θ1)+c2sin(2ωt+θ2)+⋯n=1,2,⋯
特别注意:X(t)周期是T,则cos, sin 的周期是T/n
推导傅里叶级数的系数
使用基础1中的虚指数信号,得到
X
(
t
)
=
∑
k
=
−
∞
+
∞
a
k
⋅
e
j
k
w
0
t
\boxed{ X(t)=\sum_{k=-\infty}^{+\infty} a_{k} \cdot e^{jkw_{0}t}}
X(t)=k=−∞∑+∞ak⋅ejkw0t
左右同乘
e
−
j
n
ω
0
t
e^{-j n \omega_{0} t}
e−jnω0t得到:
x
(
t
)
e
−
j
n
ω
0
t
=
∑
k
=
−
∞
+
∞
a
k
e
j
(
k
−
n
)
ω
0
t
x(t) e^{-j n \omega_{0} t}=\sum_{k=-\infty}^{+\infty} a_{k} e^{j(k-n) \omega_{0} t}
x(t)e−jnω0t=k=−∞∑+∞akej(k−n)ω0t
两边对t从0到
T
=
2
π
/
w
0
T=2\pi/w_{0}
T=2π/w0积分:
∫
0
T
x
(
t
)
e
−
j
n
ω
0
t
d
t
=
∫
0
T
∑
k
=
−
∞
+
∞
a
k
e
j
(
k
−
n
)
ω
0
t
d
t
\int_{0}^{T} x(t) e^{-j n \omega_{0} t} d t=\int_{0}^{T} \sum_{k=-\infty}^{+\infty} a_{k} e^{j(k-n) \omega_{0} t} d t
∫0Tx(t)e−jnω0tdt=∫0Tk=−∞∑+∞akej(k−n)ω0tdt
调换积分次序,提取
a
k
a_{k}
ak:
∫
0
T
x
(
t
)
e
−
j
n
ω
0
t
d
t
=
∑
k
=
−
∞
+
∞
a
k
[
∫
0
T
e
j
(
k
−
n
)
ω
0
t
d
t
]
\int_{0}^{T} x(t) e^{-j n \omega_{0} t} d t=\sum_{k=-\infty}^{+\infty} a_{k}\left[\int_{0}^{T} e^{j(k-n) \omega_{0} t} d t\right]
∫0Tx(t)e−jnω0tdt=k=−∞∑+∞ak[∫0Tej(k−n)ω0tdt]
对于右边的积分,由欧拉关系:
∫
0
T
e
j
(
k
−
n
)
ω
0
t
d
t
=
∫
0
T
cos
(
k
−
n
)
ω
0
t
d
t
+
j
∫
0
T
sin
(
k
−
n
)
ω
0
t
d
t
\int_{0}^{T} e^{j(k-n) \omega_{0} t} d t=\int_{0}^{T} \cos (k-n) \omega_{0} t d t+j \int_{0}^{T} \sin (k-n) \omega_{0} t d t
∫0Tej(k−n)ω0tdt=∫0Tcos(k−n)ω0tdt+j∫0Tsin(k−n)ω0tdt
由三角函数积分的正交性*(见扩充知识),积分值当且仅当n=k时不为0:
∑
k
=
−
∞
+
∞
a
k
[
∫
0
T
e
j
(
k
−
n
)
ω
0
t
d
t
]
=
T
a
n
a
n
=
1
T
∫
0
T
x
(
t
)
e
−
j
n
ω
0
t
d
t
\begin{aligned} &\sum_{k=-\infty}^{+\infty} a_{k}\left[\int_{0}^{T} e^{j(k-n) \omega_{0} t} d t\right]=T a_{n}\\ &a_{n}=\frac{1}{T} \int_{0}^{T} x(t) e^{-j n \omega_{0} t} d t \end{aligned}
k=−∞∑+∞ak[∫0Tej(k−n)ω0tdt]=Tanan=T1∫0Tx(t)e−jnω0tdt
即知傅里叶级数的系数为
a
n
=
1
T
∫
0
T
x
(
t
)
e
−
j
n
ω
0
t
d
t
\boxed{a_{n}=\frac{1}{T} \int_{0}^{T} x(t) e^{-j n \omega_{0} t} d t}
an=T1∫0Tx(t)e−jnω0tdt
扩充知识1:三角函数正交性
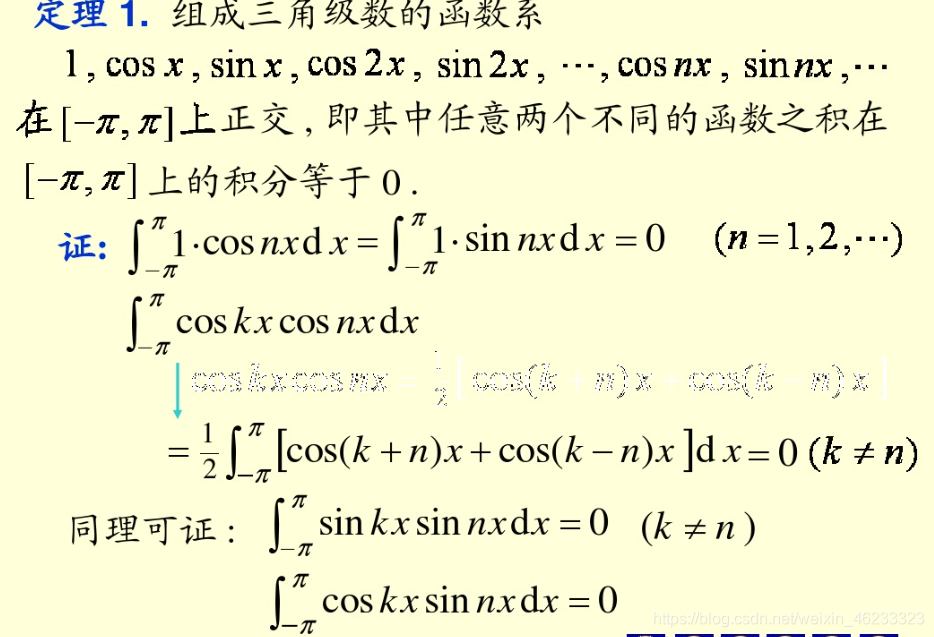
“建立三角函数坐标系,1,coswt,cos2wt,…,sinwt,sin2wt,…为正交基(不同基点积=0,同基点积!=1,所以是正交基,但是非标准正交基),则函数f(t)可以表示为三角函数坐标系下的点,其坐标即为a0,an,bn。用f(t)与各个基进行点积计算就可得到a0,an,bn”
该段参考:https://blog.csdn.net/lijil168/article/details/89261861
例题:已知
f
(
t
)
=
a
0
+
∑
n
=
1
∞
(
a
n
cos
n
w
t
+
b
n
sin
w
t
)
f(t)={a_{0}} +\sum_{n=1}^{\infty}\left(a_{n} \cos n w t+b_{n} \sin w t\right)
f(t)=a0+∑n=1∞(ancosnwt+bnsinwt),求解
a
0
、
a
n
、
b
n
a_{0}、a_{n}、b_{n}
a0、an、bn
解:
- 点积
⟨
u
,
v
⟩
{\langle u,v\rangle}
⟨u,v⟩:等价于按点乘累加,
⟨
u
,
v
⟩
=
∫
u
v
d
t
{\langle u,v\rangle}=\int uv dt
⟨u,v⟩=∫uvdt
a
0
=
⟨
f
,
1
⟩
⟨
1
,
1
⟩
=
∫
−
1
2
T
2
f
(
t
)
d
t
∫
−
1
2
T
2
d
t
=
∫
−
T
2
T
2
f
(
t
)
d
t
T
a_{0}=\frac{\langle f, 1\rangle}{\langle 1,1\rangle}=\frac{\int_{-\frac{1}{2}}^{\frac{T}{2}} f(t) d t}{\int_{-\frac{1}{2}}^{\frac{T}{2}} d t}=\frac{\int_{-\frac{T}{2}}^{\frac{T}{2}} f(t) d t}{T}
a0=⟨1,1⟩⟨f,1⟩=∫−212Tdt∫−212Tf(t)dt=T∫−2T2Tf(t)dt
a
n
=
⟨
f
,
cos
n
w
t
⟩
⟨
cos
n
t
,
cosn
w
t
⟩
=
∫
−
π
2
T
2
f
(
t
)
cos
n
t
d
t
∫
−
T
2
T
2
cos
2
n
w
t
d
t
=
∫
−
T
2
T
2
f
(
t
)
cos
n
w
t
d
t
T
2
a_{n}=\frac{\left\langle f, \cos nw t\right\rangle}{\left\langle\cos nt,\text { cosn }wt \right\rangle}=\frac{\int_{-\frac{\pi}{2}}^{\frac{T}{2}} f(t) \cos n t d t}{\int_{-\frac{T}{2}}^{\frac{T}{2}} \cos ^{2} n w t d t}=\frac{\int_{-\frac{T}{2}}^{\frac{T}{2}} f(t) \cos n w t d t}{\frac{T}{2}}
an=⟨cosnt, cosn wt⟩⟨f,cosnwt⟩=∫−2T2Tcos2nwtdt∫−2π2Tf(t)cosntdt=2T∫−2T2Tf(t)cosnwtdt
b
n
=
⟨
f
,
sin
n
w
t
⟩
⟨
sin
n
w
t
,
sin
n
w
t
⟩
=
∫
−
1
2
π
2
f
(
t
)
sin
n
w
t
d
t
∫
−
π
2
π
2
sin
2
n
v
t
d
t
=
∫
−
π
2
π
2
f
(
t
)
sin
n
w
t
d
t
T
2
b_{n}=\frac{\langle f, \sin n w t\rangle}{\langle\sin n w t, \sin n w t\rangle}=\frac{\int_{-\frac{1}{2}}^{\frac{\pi}{2}} f(t) \sin n w t d t}{\int_{-\frac{\pi}{2}}^{\frac{\pi}{2}} \sin ^{2} n v t d t}=\frac{\int_{-\frac{\pi}{2}}^{\frac{\pi}{2}} f(t) \sin n w t d t}{\frac{T}{2}}
bn=⟨sinnwt,sinnwt⟩⟨f,sinnwt⟩=∫−2π2πsin2nvtdt∫−212πf(t)sinnwtdt=2T∫−2π2πf(t)sinnwtdt
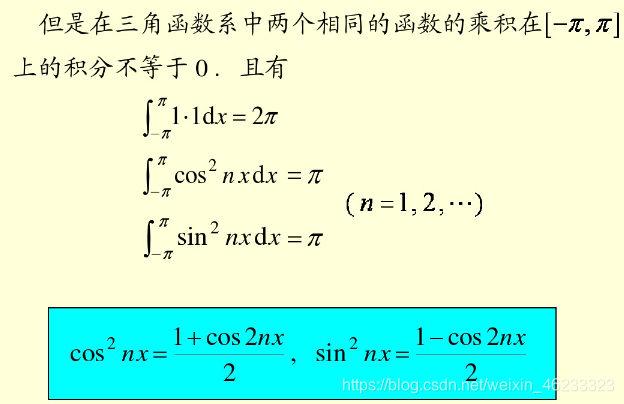
注意:三角基正交,但不是标准正交基,因为 ⟨ 1 , 1 ⟩ , ⟨ c o s n w t , c o s n w t ⟩ , ⟨ s i n n w t , s i n n w t ⟩ ≠ 1 {\langle 1,1\rangle},{\langle cosnwt, cosnwt\rangle},{\langle sinnwt, sinnwt\rangle} \not= 1 ⟨1,1⟩,⟨cosnwt,cosnwt⟩,⟨sinnwt,sinnwt⟩=1
三角函数第二积分常用公式
∫ 0 x 2 cos n x d x = ∫ 0 π 2 sin n x d x = { ( 2 m − 1 ) ! ! ( 2 m ) ! ! ⋅ π 2 n = 2 m ( 2 m − 2 ) ! ! ( 2 m − 1 ) ! ! , n = 2 m − 1 \boxed{\int_{0}^{\frac{x}{2}} \cos ^{n} x d x=\int_{0}^{\frac{\pi}{2}} \sin ^{n} x d x=\left\{\begin{array}{ll} \frac{(2 m-1) ! !}{(2 m) ! !} \cdot \frac{\pi}{2} & n=2 m \\ \frac{(2 m-2) ! !}{(2 m-1) ! !}, & n=2 m-1 \end{array}\right.} ∫02xcosnxdx=∫02πsinnxdx={(2m)!!(2m−1)!!⋅2π(2m−1)!!(2m−2)!!,n=2mn=2m−1
基础三:常见序列的作用
以下内容摘自奥本海姆-离散时间信号处理
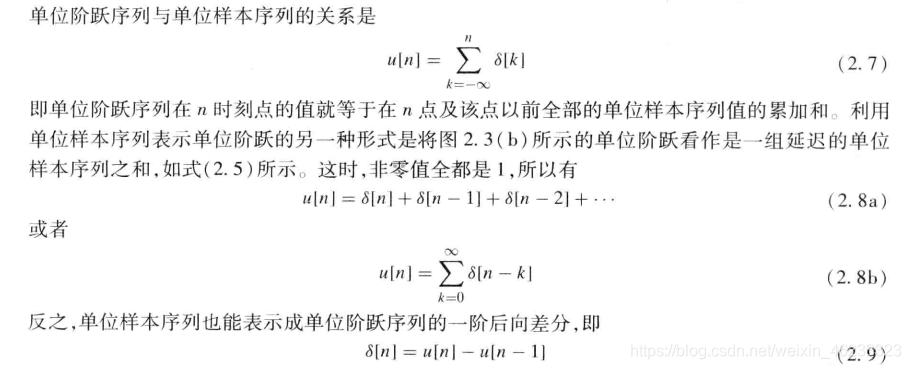
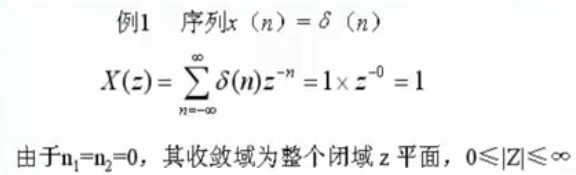
单位样本序列 δ \delta δ[n]
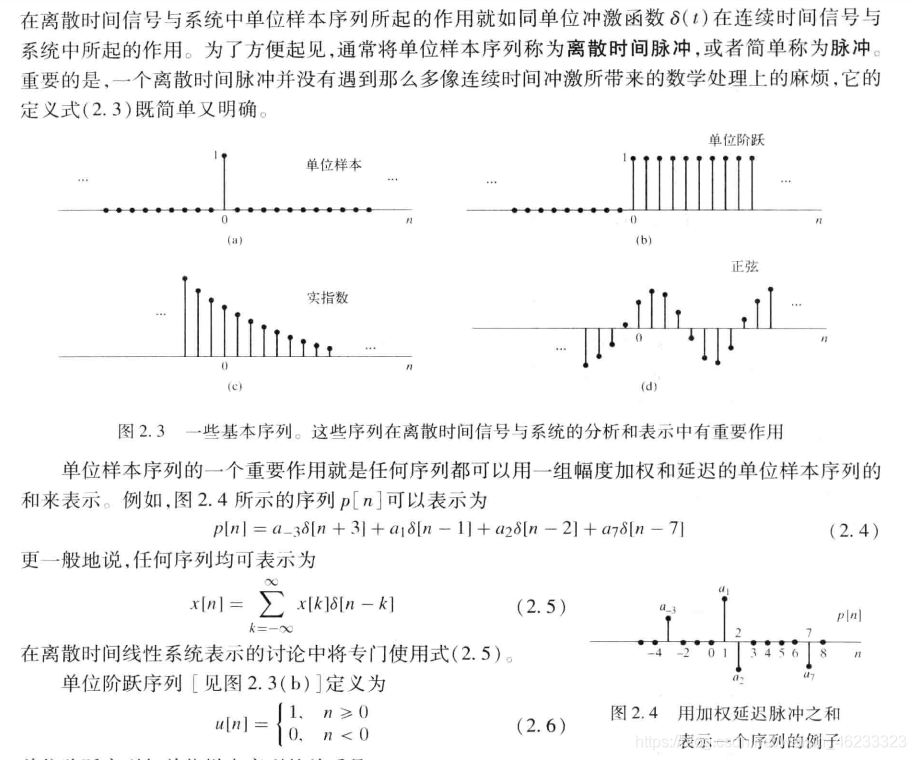
单位阶跃序列u[n]


二更:
加油冲。
李永乐老师笔记
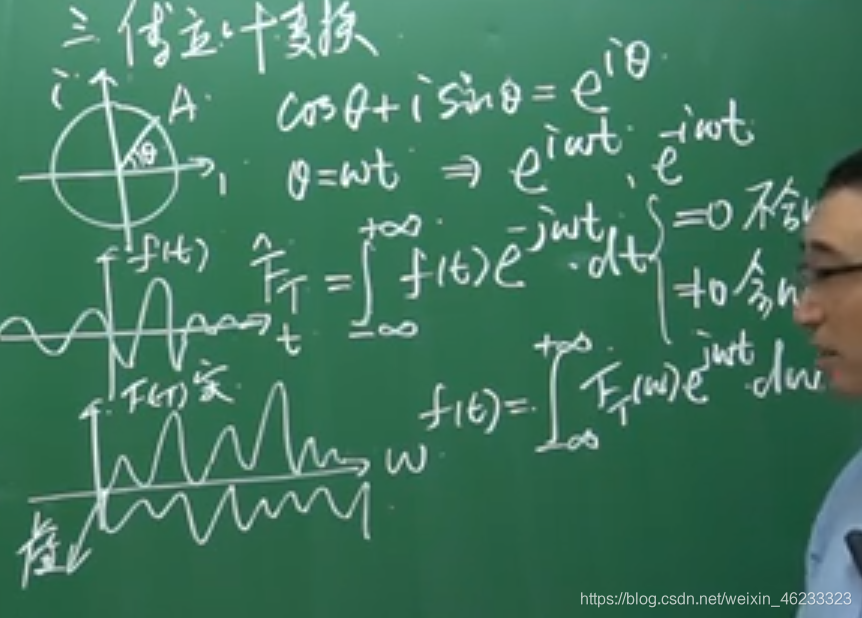
时域和频域是在不同角度观察信号:
由于现实中存在着大量信号是非周期的信号,可以看成周期是无穷。
利用上文提到的三角函数正交性,只需要内积,也就是上文的傅里叶变换公式,就可以提取包含
w
w
w的成分(如果不包含,则内积结果为0)
拉普拉斯变换和衰减因子
因为所有的正弦波余弦波都有最大值,如果要描述一个在远处是无穷的信号,就很没用。因此要对原信号乘上一个衰减因子。
在上文进行展开时我们用到了:
f
(
x
)
=
K
e
(
σ
+
j
w
)
t
=
K
e
σ
t
+
j
w
t
=
K
e
σ
t
(
c
o
s
(
w
t
)
+
j
s
i
n
(
w
t
)
)
f(x)=Ke^{(\sigma + jw)t}=Ke^{\sigma t+jwt}=Ke^{\sigma t}(cos(wt)+jsin(wt) )
f(x)=Ke(σ+jw)t=Keσt+jwt=Keσt(cos(wt)+jsin(wt))
这里的
σ
\sigma
σ就可以看做一种衰减因子(<0时)
有衰减因子的傅里叶变换:
∫
−
∞
+
∞
f
(
t
)
e
−
σ
t
⋅
e
−
j
w
t
⋅
d
t
\int_{-\infty}^{+\infty} f(t) e^{-\sigma t} \cdot e^{-j w t} \cdot d t
∫−∞+∞f(t)e−σt⋅e−jwt⋅dt
物理上还可以理解为:为让一个边震荡边增加幅度的正弦波来参与原函数。
离散傅里叶变换
在上文中已经推导了函数的傅里叶系数,则对于周期为2
π
\pi
π的周期函数
f
(
x
)
f(x)
f(x),且
f
(
x
)
=
a
0
2
+
∑
n
=
1
∞
(
a
n
cos
n
x
+
b
n
sin
n
x
)
f(x)=\frac{a_{0}}{2}+\sum_{n=1}^{\infty}\left(a_{n} \cos n x+b_{n} \sin n x\right)
f(x)=2a0+∑n=1∞(ancosnx+bnsinnx)有:
f
(
x
)
=
a
0
2
+
∑
n
=
1
∞
(
a
n
cos
n
x
+
b
n
sin
n
x
)
(
a
n
=
1
π
∫
−
π
π
f
(
x
)
cos
n
x
d
x
(
n
=
0
,
1
,
⋯
)
b
n
=
1
π
∫
−
π
π
f
(
x
)
sin
n
x
d
x
(
n
=
1
,
2
,
⋯
)
\begin{aligned} f(x) &=\frac{a_{0}}{2}+\sum_{n=1}^{\infty}\left(a_{n} \cos n x+b_{n} \sin n x\right) \\ \left (a_{n}\right.&=\frac{1}{\pi} \int_{-\pi}^{\pi} f(x) \cos n x \mathrm{d} x \quad(n=0,1, \cdots) \\ b_{n} &=\frac{1}{\pi} \int_{-\pi}^{\pi} f(x) \sin n x \mathrm{d} x \quad(n=1,2, \cdots) \end{aligned}
f(x)(anbn=2a0+n=1∑∞(ancosnx+bnsinnx)=π1∫−ππf(x)cosnxdx(n=0,1,⋯)=π1∫−ππf(x)sinnxdx(n=1,2,⋯)
第一行称为傅里叶级数,第二行第三行称为傅里叶系数。
离散形式和补偿规律
参考https://www.zhihu.com/question/279808864/answer/552617806
希望得到(0,1,0,0)的离散信号【周期为4,在时间点time=2时输出1,time=1,3,4输出0】,则需要先获得(1,0,0,0),然后移位,即对相位进行补偿,从而获得移位的效果。
利用:
- 当两个单位圆周(单位值号)之间角度差180度的时
候,他俩相加所得的信号振幅为0。 - 三个单位圆周角度互相相差120度时,也有同样现象。
- … …
- n个单位圆周角度互相差360/n度时,信号振幅和为0
即可获得单位圆震荡的表示方法,动图见上文知乎链接。
使用虚指数信号的话,即可表示成:从 e − i 2 π 0 4 e^{-i 2 \pi \frac{0}{4}} e−i2π40补偿到 e − i 2 π 1 4 e^{-i 2 \pi \frac{1}{4}} e−i2π41,即可实现(0,1,0,0)
图像高低频率性质
以照片为例,低频表示人的轮廓,高频表示人的细节(如斑点,皱纹等)
磨皮一定程度上就是去掉高频成分
相位补偿
更长的信号可以通过叠加 e − i 2 π i k e^{-i 2 \pi \frac{i}{k}} e−i2πki的方式,对时间点有k个的单位信号补偿 i i i。
对于不同频率信号来说,圆周的旋转素履是不同的。我们的信号周期为4,频率为1Hz, 时移1需要1/4*360=90度的相位补偿,同理1Hz信号时移2,或者2Hz的信号时移1,都需要180度。
公式:
2
π
n
−
1
N
2 \pi \frac{n-1}{N}
2πNn−1
而当信号是(m_{1},m_{2},m_{3},m_{4})类型的时候, e − i 2 π i k e^{-i 2 \pi \frac{i}{k}} e−i2πki前还需要乘以幅值平均 m i / 4 m_{i}/4 mi/4
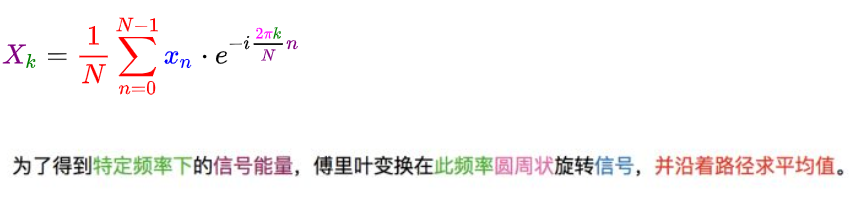
对于某特定频率k,即可得到离散傅里叶变换公式:
X
k
=
1
N
∑
n
=
0
N
−
1
x
n
⋅
e
−
2
π
i
N
k
n
X_{k}=\frac{1}{N} \sum_{n=0}^{N-1} x_{n} \cdot e^{-\frac{2 \pi i}{N} k n}
Xk=N1n=0∑N−1xn⋅e−N2πikn
形象化解释:
傅里叶变换后周期的改变情况:
周期<—>离散,非周期<—>连续

三更:
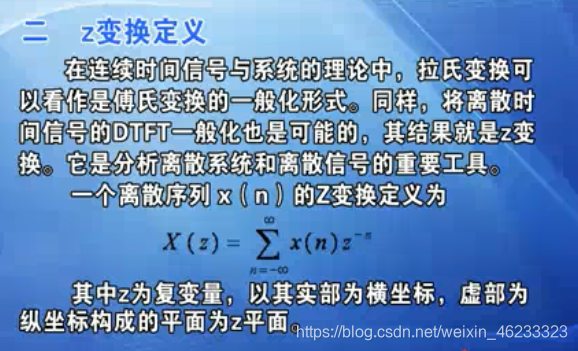
Z变换
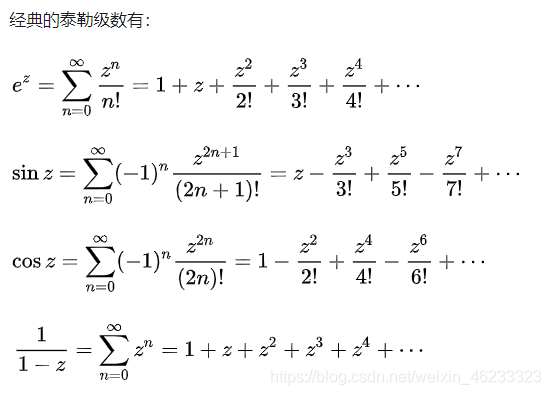
基础知识:洛伦级数
洛朗级数是泰勒级数的延拓版
参考:https://www.zhihu.com/question/26482591
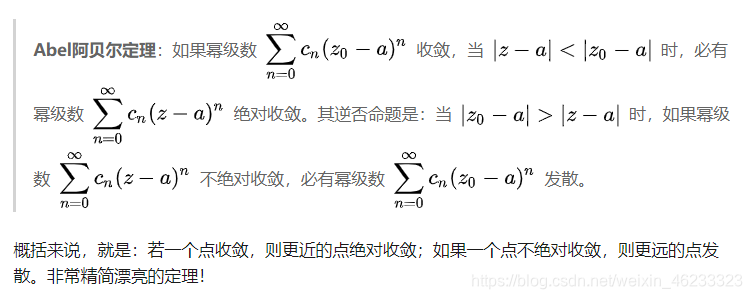
阿贝尔定理:
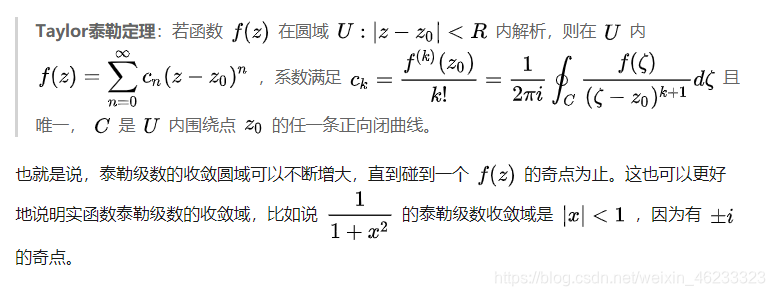
泰勒:
洛伦:

z变换和拉普拉斯变换的关系
参考https://www.bilibili.com/video/BV1TW411F7wj?from=search&seid=15474440315054549
z变换相当于一个封装了更多的拉普拉斯变换
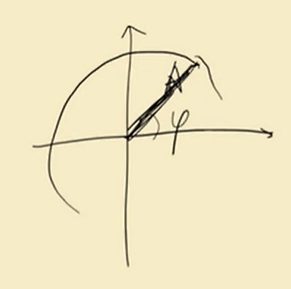
z
=
e
(
σ
+
j
w
)
T
=
e
σ
⋅
T
⋅
e
j
w
⋅
T
=
A
⋅
e
j
φ
\begin{aligned} z &=e^{(\sigma+j w) T} \\ &=e^{\sigma \cdot T} \cdot e^{j w \cdot T} \\ &=A \cdot e^{j \varphi} \end{aligned}
z=e(σ+jw)T=eσ⋅T⋅ejw⋅T=A⋅ejφ
z就相当于一根长A,角
j
φ
j \varphi
jφ的棍子
σ
=
0
\sigma=0
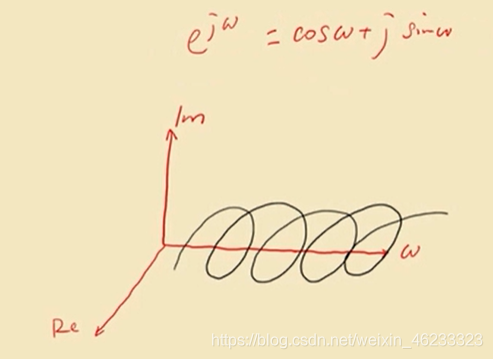
σ=0时,拉普拉斯变换退化成傅里叶变换
σ
=
0
⟶
S
=
σ
+
j
w
=
j
w
\sigma=0 \longrightarrow S=\sigma+j w=j w
σ=0⟶S=σ+jw=jw
此时A=1,所以傅里叶变换是单位圆上的z变换。
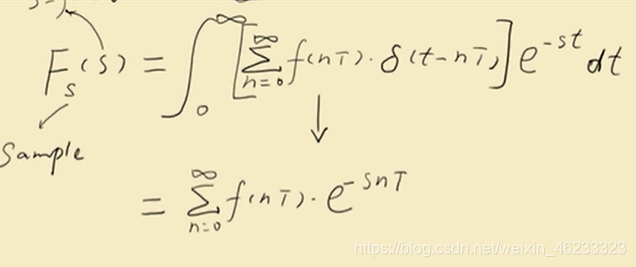
z变换可以由离散信号的拉普拉斯变换推导过来:
左式
F
s
(
s
)
F_{s}(s)
Fs(s)中,_{s}表示sample, (s)表示复数s
右式T是指0和1之间的间隔。
立体上来看:
带上
n
^{n}
n之后就相当于敲碎成一个一个离散的点
(二维视图)
没有
n
^{n}
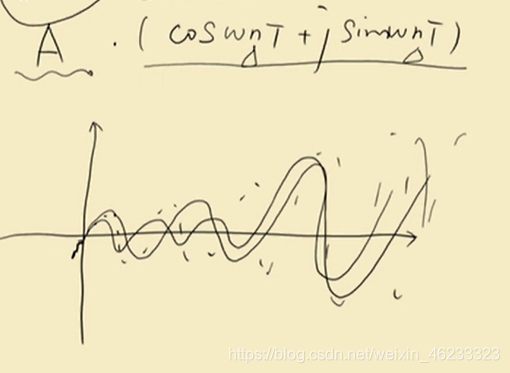
n就是单独一个点:
e
s
T
=
e
(
σ
+
j
ω
)
T
=
e
σ
T
⋅
e
j
w
T
=
A
⋅
(
c
o
s
w
T
+
j
sin
w
T
)
=
A
(
a
+
b
j
)
\begin{array}{l} e^{s T} \\ =e^{(\sigma+j \omega) T} \\ =e^{\sigma_{T}} \cdot e^{j w_{T}} \\ =A \cdot\left(cos wT+j \sin w{T}\right) \\ =A(a+bj)\end{array}
esT=e(σ+jω)T=eσT⋅ejwT=A⋅(coswT+jsinwT)=A(a+bj)
四更继续z变换
参考中国大学慕课-东南大学数字信号处理
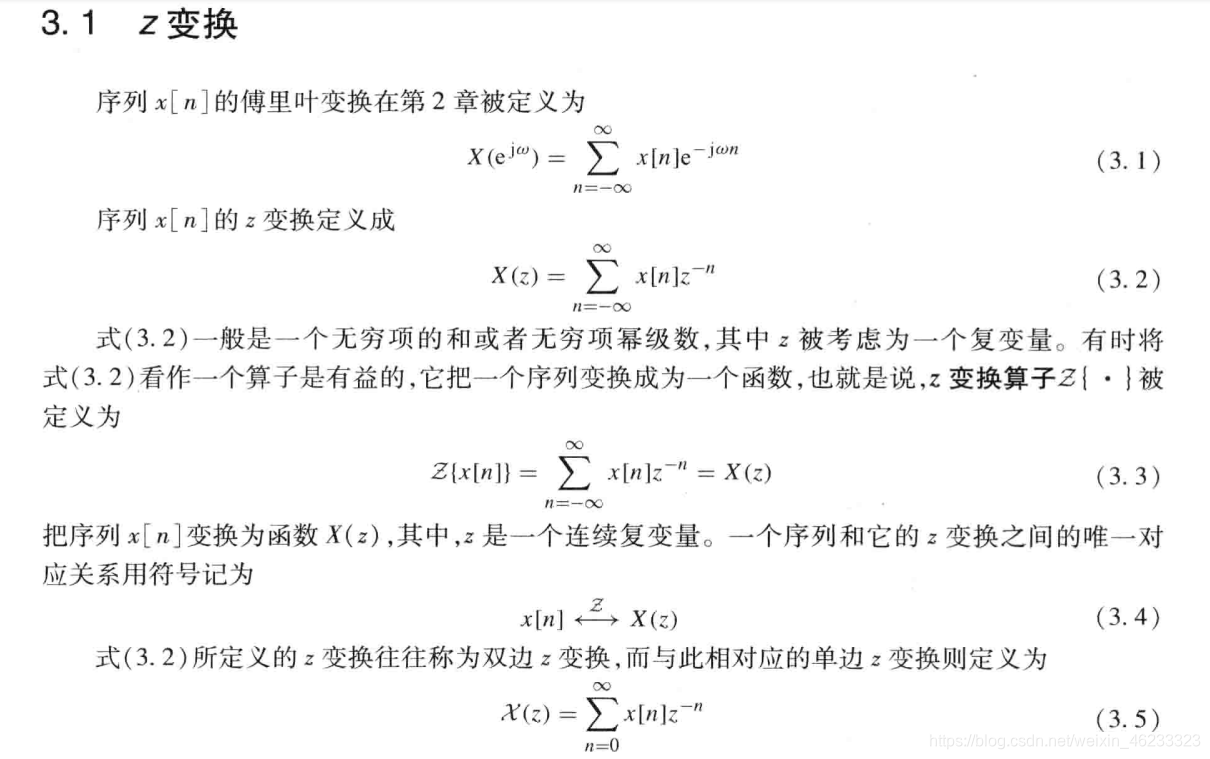
学术定义算子和收敛域
奥本海姆定义:
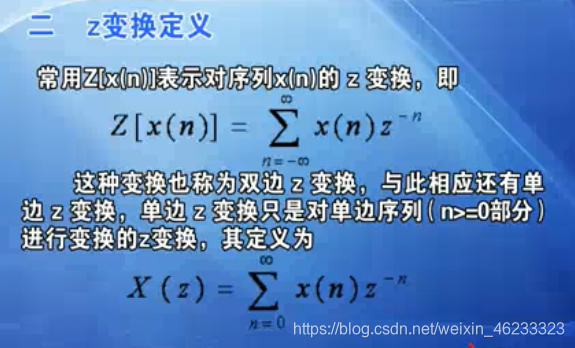
网课定义:
单边z变换只对大于等于0作变换
但如果只给出表达式,不给出收敛域,是很不对的
对于一个相同的z变换,给定不同的收敛域,那反应的序列也不一样。
一般收敛域是一个圆环
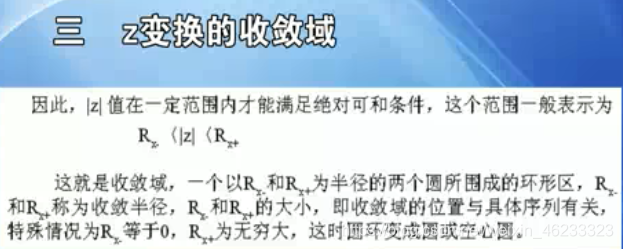
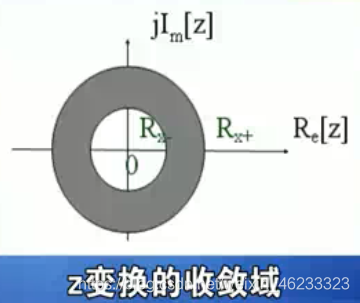
下面讨论三种不同序列的收敛域:
1 :有限长序列
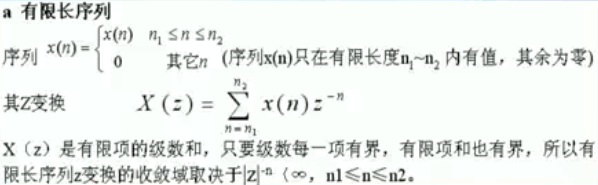
这个序列因为是有限的,只要项里没有无穷,则在几乎整个z平面上收敛,
注意:需要单独讨论0点和无穷点。
经常能满足一个条件,所以要么包含零点,要么包含零点

只有一个特例序列,两边都包含,就是下图:
例子2:
矩形序列x(n)=
R
N
(
n
)
R_{N}(n)
RN(n),收敛域是0到N-1
X
(
z
)
=
∑
n
=
−
∞
∞
R
N
(
n
)
z
−
n
=
∑
n
=
0
N
−
1
z
−
n
=
1
+
z
−
1
+
z
−
2
−
1
+
⋯
+
z
−
(
N
−
1
)
X(z)=\sum_{n=-\infty}^{\infty} R_{N}(n) z^{-n}=\sum_{n=0}^{N-1} z^{-n}=1+z^{-1}+z^{-2}-1+\cdots+z^{-(N-1)}
X(z)=n=−∞∑∞RN(n)z−n=n=0∑N−1z−n=1+z−1+z−2−1+⋯+z−(N−1)
X
(
z
)
=
1
−
z
−
N
1
−
z
−
1
,
0
<
1
z
∣
≤
∞
X(z)=\frac{1-z^{-N}}{1-z^{-1}}, 0<1 z | \leq \infty
X(z)=1−z−11−z−N,0<1z∣≤∞
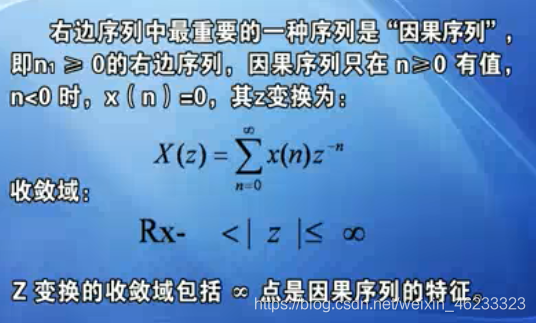
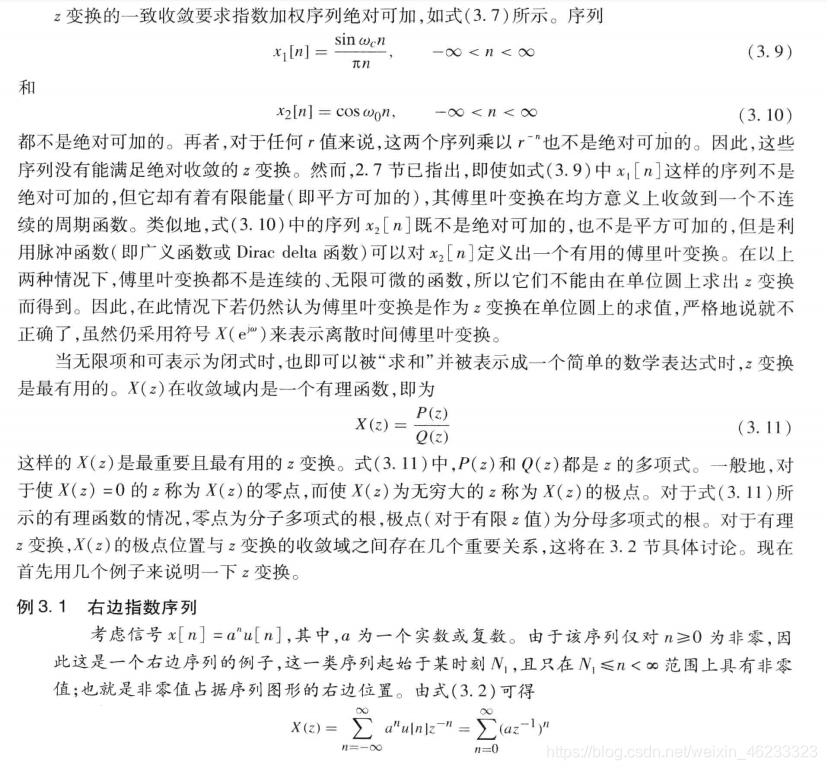
2: 右边序列
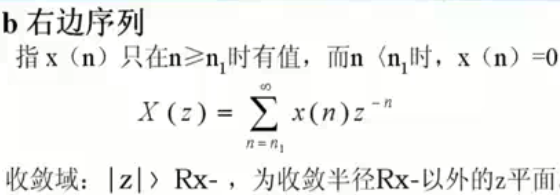
收敛域在圆外,包含了无穷远点。
3:左边序列

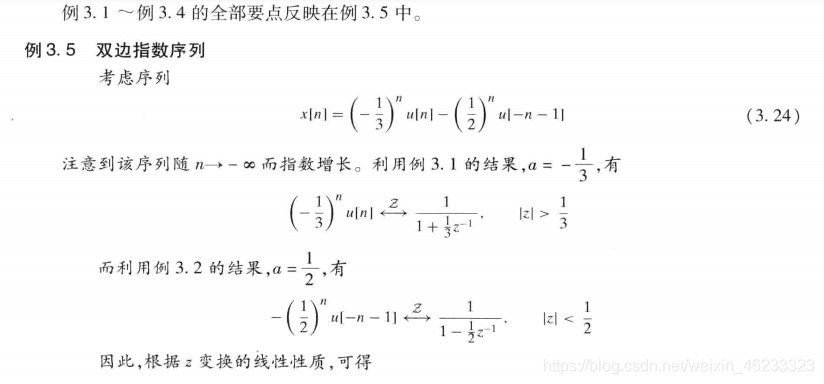
4: 双边序列
可以看做两者之和

可以分解后分别求
收敛域是公共部分的圆环
z变换小结
z变换作用和特点
z变换例题
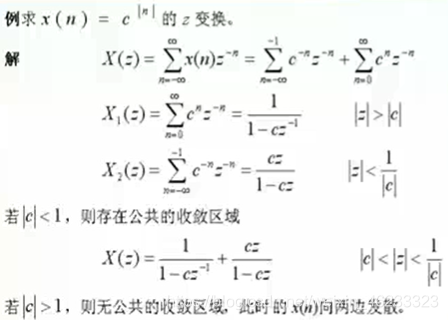

逆z变换
c在收敛区间内
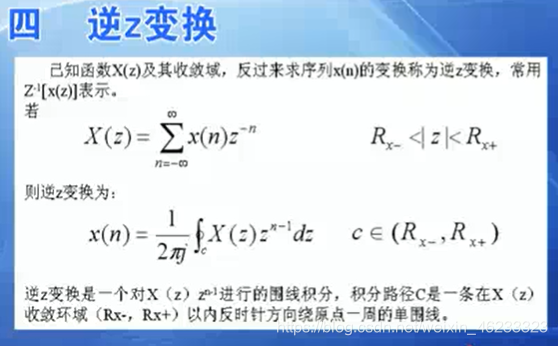
在收敛圆环上做围线积分
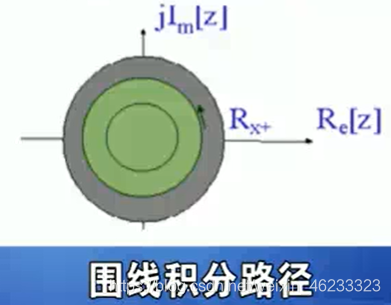
因为围线积分很麻烦,求解逆z变换有三种方法
- 幂级数
- 留数定理
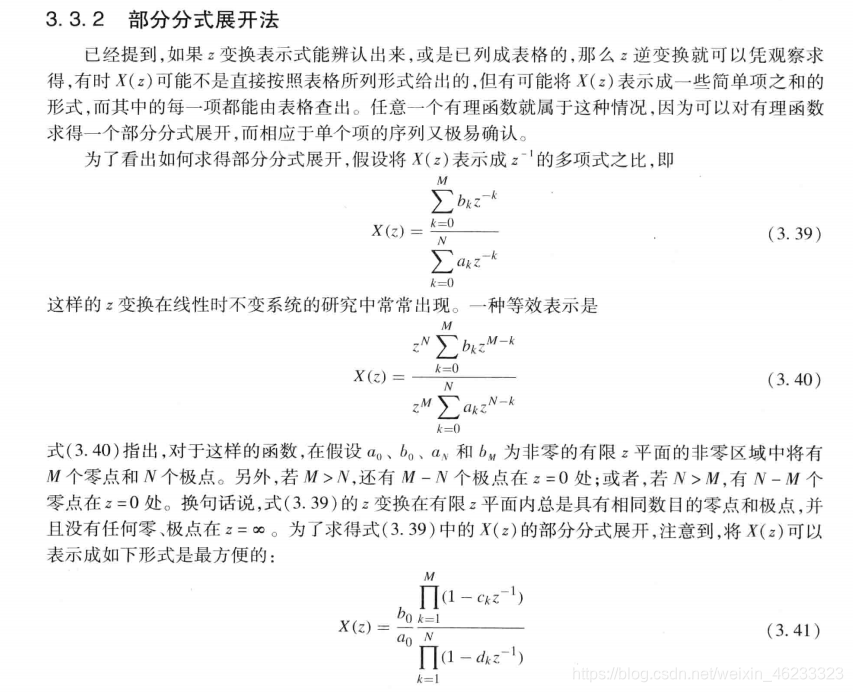
- 部分分式
正变换和收敛域重要,逆变换用的不多
z变换表和逆变换计算方法
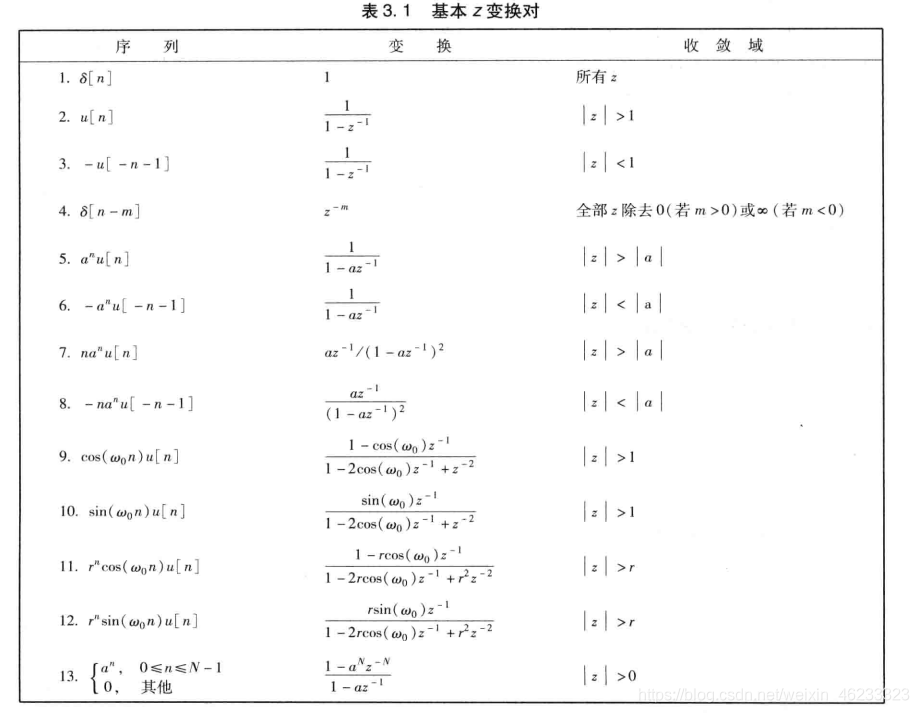
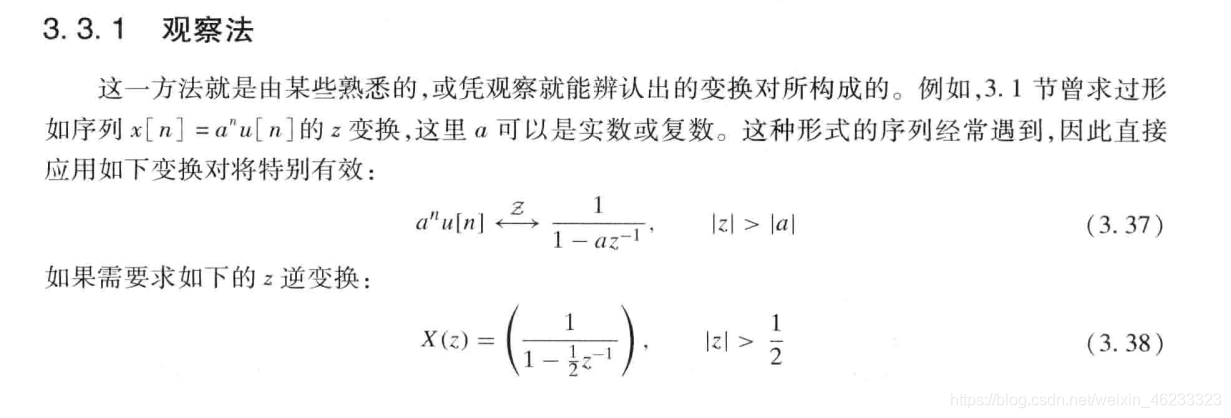
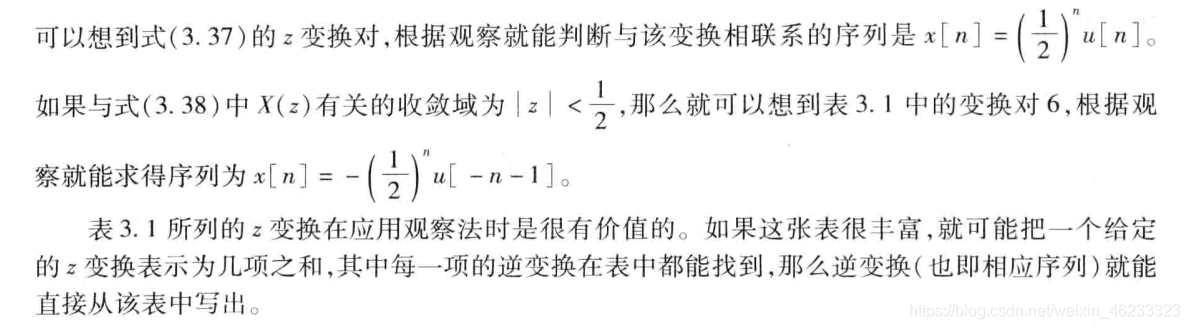
部分分式,写成零点-极点式子
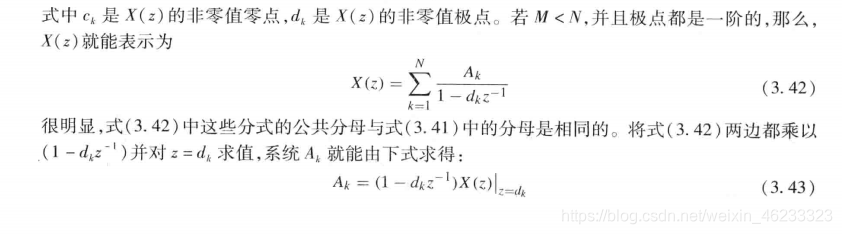
特别强调
对x(n-n0)做z变换:
Z
(
X
(
n
−
n
0
)
)
=
Z
−
n
0
X
(
z
)
\boxed{ Z(X(n-n_{0})) = Z^{-n0} X(z)}
Z(X(n−n0))=Z−n0X(z)
其中右式X(z)表示对X(n)做z变换
所以看到z的负幂次,实际实现的是系统的延迟
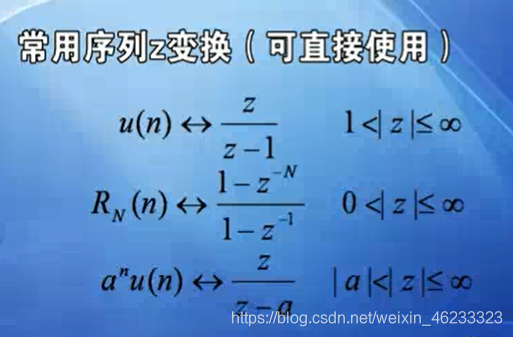
常用序列的z变换
记住:
(
R
N
(
n
)
R_{N}(n)
RN(n)在z->无穷时和u(n)相同)
【现在已经写了一万三千字了。。真不容易啊,您能看到这个地方也不容易】
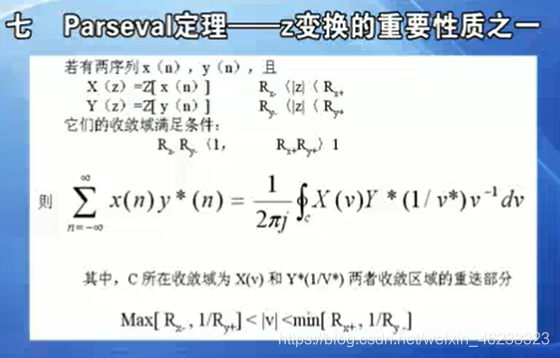
【重要性质】Parseval 定理
【所有正交变换都满足该定理,后面DFT也会遇到】
本质上反映能量相同
离散时间系统
八位系统即可完成的A/D转换:数码相机(每个颜色8位)
24位:声卡【HD-CD就达到24w位】
12位:打电话的采样
采用不同采样精度的原因:钱。
一般把系统认为黑盒子,只研究输入输出的关系,不考虑实现:
最常用:线性时不变系统,本课将主要研究此处
采样频率
z变换是DTFT的一般化,在系统里很有用。反映了频谱关系。
目前DTFT:频域上连续
DFT:频域上离散
离散化之后就不用积分了。
DFT延伸出FFT(更快计算)
字数太多老出BUG,本文就此完结。开新文章讲离散时间系统。
【感谢您阅读到这里的毅力】


















 7394
7394

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









