






00 说明
文章转载至: https://blog.csdn.net/weijimin1/article/details/93512218?ops_request_misc=&request_id=&biz_id=102&utm_term=%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE%E7%9A%84%E6%80%A7%E8%83%BD%E8%A6%81%E6%B1%82&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-1-93512218.142v86insert_down28v1,239v2insert_chatgpt&spm=1018.2226.3001.4187
01 性能参数说明
激光雷达的主要性能参数有激光的波长、探测距离、FOV(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、IP防护等级、功率、供电电压、激光发射方式(机械/固态)、使用寿命等。激光雷达的优势非常明显,其探测的范围更广,且精度更高。但是在极端天气或者烟雾环境下性能大大降低,而且由于其数据采集量大,价格也非常贵。
激光的波长:目前市场上三维成像激光雷达最常用的波长是905nm和1550 nm。1550nm波长LiDAR传感器可以以更高的功率运行,以提高探测范围,同时对于雨雾的穿透力更强。905nm的主要优点是硅在该波长处吸收光子,而硅基光电探测器通常比探测1550 nm光所需的铟镓砷(InGaAs)近红外探测器便宜。
安全等级:激光雷达的安全等级是否满足Class 1,需要考虑特定波长的激光产品在完全工作时间内的激光输出功率,即激光辐射的安全性是波长、输出功率,和激光辐射时间的综合作用的结果。
探测距离:激光雷达的测距与目标的反射率相关。目标的反射率越高则测量的距离越远,目标的反射率越低则测量的距离越近。因此在查看激光雷达的探测距离时要知道该测量距离是目标反射率为多少时的探测距离。
FOV:激光雷达的视场角有水平视场角和垂直视场角。如果是机械旋转激光雷达,则其水平视场角为360度。
角分辨率:一个是垂直分辨率,另一个是水平分辨率。水平方向上做到高分辨率其实不难,因为水平方向上是由电机带动的,所以水平分辨率可以做得很高。一般可以做到0.01度级别。垂直分辨率是与发射器几何大小相关,也与其排布有关系,就是相邻两个发射器间隔做得越小,垂直分辨率也就会越小。垂直分辨率为0.1~1度的级别。
出点数:每秒激光雷达发射的激光点数。激光雷达的点数一般从几万点至几十万点每秒左右。
线束:多线激光雷达,就是通过多个激光发射器在垂直方向上的分布,通过电机的旋转形成多条线束的扫描。多少线的激光雷达合适,主要是说多少线的激光雷达扫出来的物体能够适合算法的需求。理论上讲,当然是线束越多、越密,对环境描述就更加充分,这样还可以降低算法的要求。常见的激光雷达的线束有:16线、32线、64线等。
输出参数:障碍物的位置(三维)、速度(三维)、方向?、时间戳(某些激光雷达有)、反射率
使用寿命:机械旋转的激光雷达的使用寿命一般在几千小时;固态激光雷达的使用寿命可高达10万小时。
激光发射方式:传统的采用机械旋转的结构,机械旋转容易导致磨损使得激光雷达的使用寿命有限。固态激光雷达主要由三类-Flash 、MEMS、相控阵。Flash 激光雷达只要有光源,就能用脉冲一次覆盖整个视场。随后再用飞行时间(ToF)方法接收相关数据并绘制出激光雷达周围的目标。MEMS激光雷达其结构相当简单,只要一束激光和一块反光镜。具体来说,激光射向这块类似陀螺一样旋转的反光镜就行,反光镜通过转动,可以实现对激光方向的控制。相控阵激光雷达利用独立天线同步形成的微阵列,相控阵可以向任何方向发送无线电波,完全省略了“旋转”这一步骤,只需控制每个天线发送信号间的时机或阵列,就能控制信号射向特定位置。
02 不同厂商激光雷达参数汇总
目前国内外主要的激光雷达厂商见下表所示


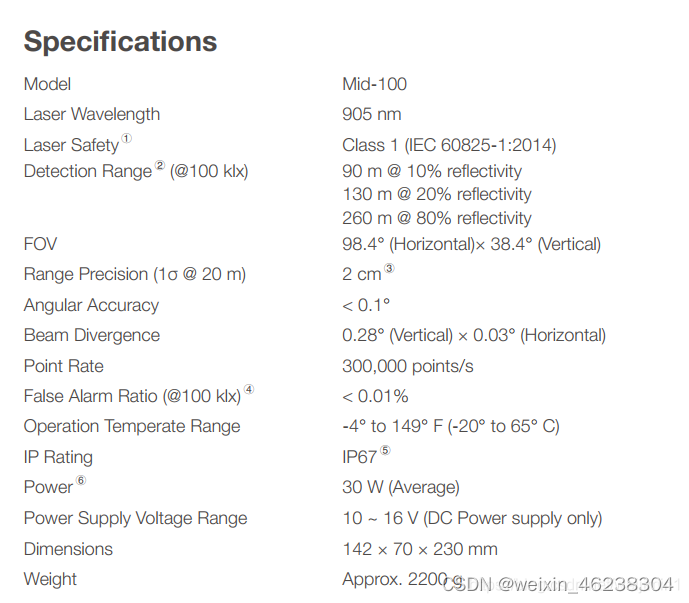
(1)大疆Livox Mid-100 激光雷达的性能指标
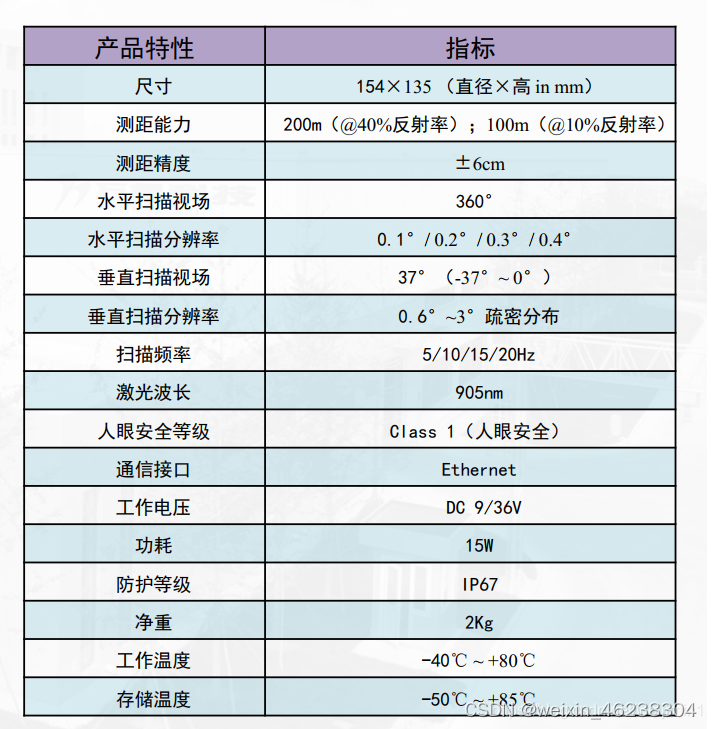
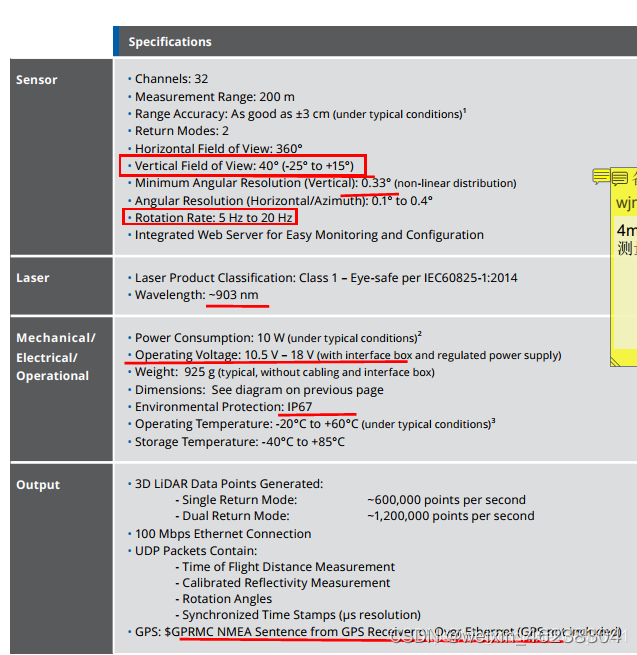
(2)万集路侧激光雷达的性能指标
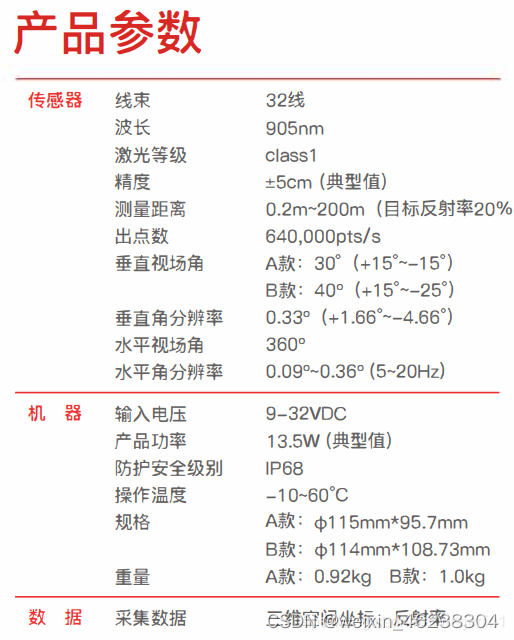
(3)速腾聚创 16/32 线激光雷达性能指标
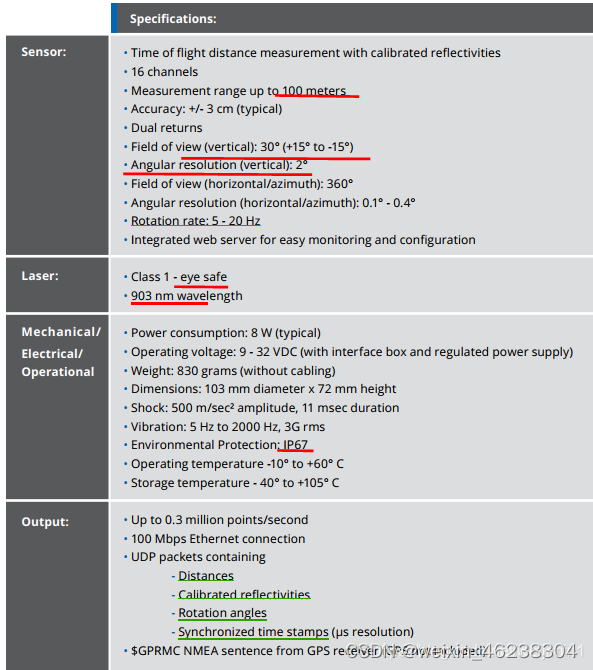
(4)velodyne 16/32 线激光雷达性能指标
————————————————
版权声明:本文为CSDN博主「jm-csu」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weijimin1/article/details/93512218


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









