






自动驾驶感知、融合、规控:
https://blog.csdn.net/yuan2520?type=blog
Backlog:
自动驾驶之心
https://blog.csdn.net/CV_Autobot?type=blog
OpenPilot分析 | 从图像到油门/刹车
https://blog.csdn.net/CV_Autobot/article/details/129036228?spm=1001.2014.3001.5502
一些关于Openpilot资料汇总
https://zhuanlan.zhihu.com/p/487589737
可行驶区域检测
https://blog.csdn.net/liaojiacai/article/details/77211692?spm=1001.2014.3001.5502
https://www.cnblogs.com/wengzilin/archive/2013/04/24/3041019.html
自动驾驶 Apollo 源码分析系列,感知篇(六):车道线 Dark SCNN 算法简述及车道线后处理代码细节简述
自动驾驶全栈资料汇总!感知定位融合~
1深度学习
不定期更新多模态、搜索推荐、基础技术、前沿追踪
https://blog.csdn.net/qq_39388410?type=blog4
Nakaizura Blog Index(博文目录索引)
https://nakaizura.blog.csdn.net/article/details/107898237?spm=1001.2014.3001.5502
核函数详解
https://blog.csdn.net/weixin_42398658/article/details/83181762
径向基核函数(RBF)详解
深度学习相关专栏
机器学习文章:作者: GoAI
https://blog.csdn.net/qq_36816848/category_10846122.html
深度学习文章:作者: GoAI
https://blog.csdn.net/qq_36816848/category_11053032.html
深度学习索引:
https://nakaizura.blog.csdn.net/article/details/107898237?spm=1001.2014.3001.5502
2视觉感知
MOBILEYE: Vision-based ACC with a Single Camera
本文为基于MobliEye的论文理解。文中将路面是平的和相机水平(光轴平行于路面)安装作为假设条件,但可以在文章的基础上,对摄像机角度和道路坡道进行补偿。
https://blog.csdn.net/qq_28087491/article/details/106627112
MOBILEYE: Headlight Taillight and Streetlight Detection
本发明使用安装在移动车辆上的图像传感器,该传感器实时连续采集图像帧。在每一帧图像中,检测到一个足够亮的光斑。如果该光斑可以在随后的图像帧中匹配的上,该光斑和对应的光斑是同一物体。通过处理数据,可以对物体(或光斑)进行分类来产生一个物体分类。
https://blog.csdn.net/qq_28087491/article/details/124141718
Tesla技术方案深度剖析:自动标注/感知定位/决策规划/场景重建/场景仿真/数据引擎
【自动驾驶】车道线检测相关基础知识
https://blog.csdn.net/All_In_gzx_cc/article/details/125595821
当前常见的检测方法
基于霍夫变换的车道线检测:https://blog.csdn.net/All_In_gzx_cc/article/details/125545025
基于多项式拟合和透视变换的车道线检测 https://blog.csdn.net/liaojiacai/article/details/63685342
C0为起始点曲率,C1为曲率变化率。
C0,C1都为0时,直线;
C1为0时,C0不为0,圆弧;
C1不为0时,缓和曲线。
3激光雷达
4毫米波雷达
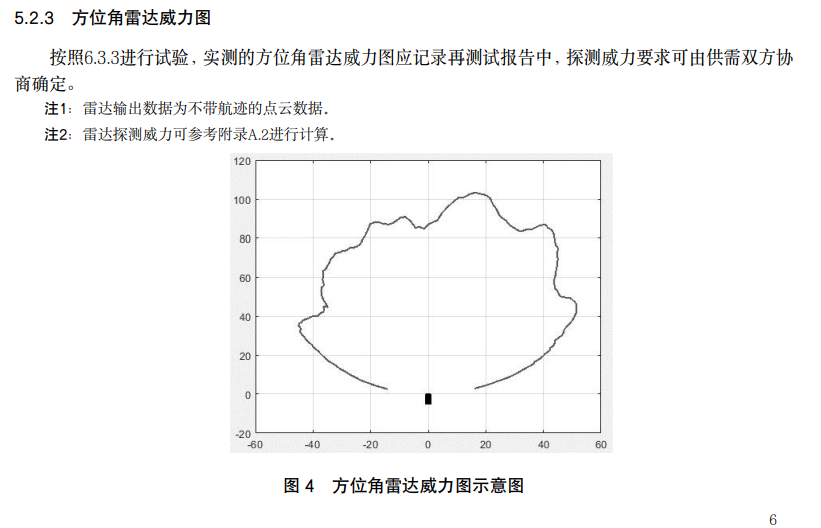
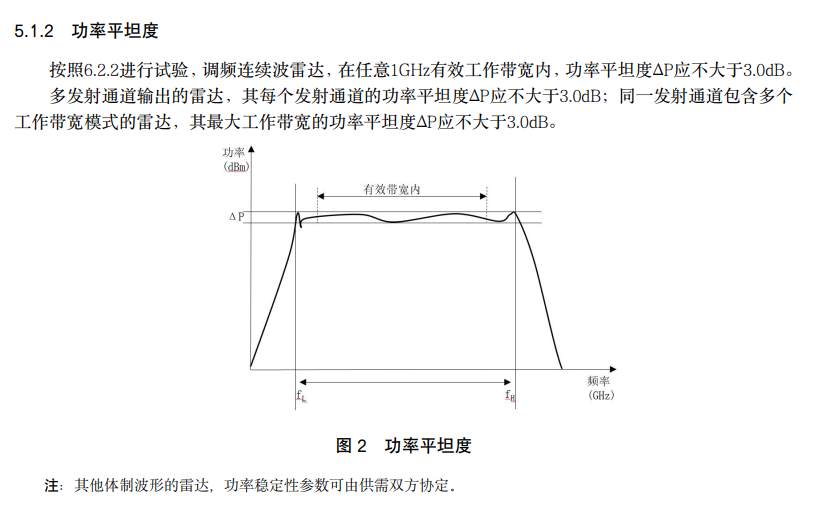
20_WD_PDF_312_车载毫米波雷达性能要求及试验方法



5 4D毫米波雷达
一文看懂4D毫米波雷达
4D毫米波雷达突破了传统雷达的局限性
随着毫米波芯片技术的发展,应用于车载的毫米波雷达系统得到了大规模应用,然而传统雷达系统面临着以下缺陷:
当有静止车辆,目标信息容易和地杂波等掺杂在一起,识别难度较大,而移动车辆可以靠多普勒识别。
当有横穿车辆和行人, 多普勒为零或很低,难以检测。
没有高度信息,高处物体如桥粱路牌和地面的车辆一样区分不开,容易造成误刹,影响安全性。
角度分辨率低,当两个距离很近的物体,其回波会被混在一起,很难知道有几个目标。
用雷达散射截面积区分物体难:可以通过不同物体的雷达散射截面积的不同和不同帧之间的反射点的不同来区分路牌、立交桥和车辆,然而准确率并不高。
最远探测距离不超过200 m,探测距离范围有限。
而4D毫米波雷达技术突破了传统车载雷达的局限性,可以以很高的分辨率同时探测目标的距离、速度、水平方位和俯仰方位,使得:
最远探测距离大幅可达300多米,比激光雷达和视觉传感器都要远
4D毫米波雷达系统水平角度分辨率较高,通常可以达到1 的角度分辨率,可以区分 300m 处的两辆近车
4D毫米波雷达系统可以测量俯仰角度,可达到优于2°的角度分辨率,可在 150m 处区分地物和立交桥。
当有横穿车辆和行人, 多普勒为零或很低时通过高精度的水平角和高精度的俯仰角可以有效识别目标。
目标点云更密集,信息更丰富,更适合与深度学习框架结合。
6融合
无人驾驶感知篇之融合(五)
https://blog.csdn.net/yuan2520/article/details/123998756
多传感器融合(算法)综述
融合算法:
加权平均法:加权平均法是信号级融合方法最简单、最直观方法,主要思想是将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。
多贝叶斯估计法:多贝叶斯估计法的主要思想是将传感器信息依据概率原则进行组合,测量不确定性以条件概率表示,当传感器组的观测坐标一致时,可以直接对传感器的数据进行融合。多数情况下,为数据融合提供了一种手段,是融合静环境中多传感器高层信息的常用方法。
卡尔曼滤波法:卡尔曼滤波法的主要思想是主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。
D-S证据推理法:D-S证据推理法主要是贝叶斯推理的扩充,其3个基本要点是:基本概率赋值函数、信任函数和似然函数。D-S方法的推理结构是自上而下的,分三级。第1级为目标合成;第2级为推断;第3级为更新。
产生式规则法:产生式规则法主要采用符号表示目标特征和相应传感器信息之间的联系,与每一个规则相联系的置信因子表示它的不确定性程度。当在同一个逻辑推理过程中,2个或多个规则形成一个联合规则时,可以产生融合
7轨迹预测
一文熟悉自动驾驶轨迹预测发展现状!
https://mp.weixin.qq.com/s/iZfjEsmCLGm5AiBZhNsj2Q
一文熟悉自动驾驶轨迹预测发展现状!
8规划控制
Dijkstra算法图文详解
https://blog.csdn.net/lbperfect123/article/details/84281300
决策规划(四),运动规划常用算法
自动驾驶路径规划五大常用算法(Dijkstra/人工势场/图搜索等)
自动驾驶算法详解(3): LQR算法进行轨迹跟踪,lqr_speed_steering_control( )的python实现
https://l5player.blog.csdn.net/article/details/124456694
在量产ADAS或者自动驾驶算法中,横纵向控制往往都是分开控制的,上一篇文章中介绍了如何使用LQR同时进行横纵向的控制,本文将介绍一种横纵向分开控制的思路,将使用LQR算法进行横向控制,同时使用PID算法进行纵向控制。这种方法在很多自动驾驶科技公司比较常见,百度apollo的控制节点conrol也是使用同样的思路。
自动驾驶算法详解(4): 横向LQR、纵向PID控制进行轨迹跟踪以及python实现
自动驾驶算法与仿真技术
https://blog.csdn.net/nn243823163/category_11685851.html
Apollo决策规划模块代码详解
https://blog.csdn.net/nn243823163/category_11685852.html
9硬件平台
SGMII协议解析
https://blog.csdn.net/poena/article/details/118992738
MII是ethernet协议里面MAC层和PHY层之间的接口标准
GMSL:
GMSL(Gigabit Multimedia Serial Links),中文名称为千兆多媒体串行链路,是Maxim公司推出的一种高速串行接口,适用于音频,视频和控制信号的传输。
https://blog.csdn.net/weixin_50875614/article/details/119995651
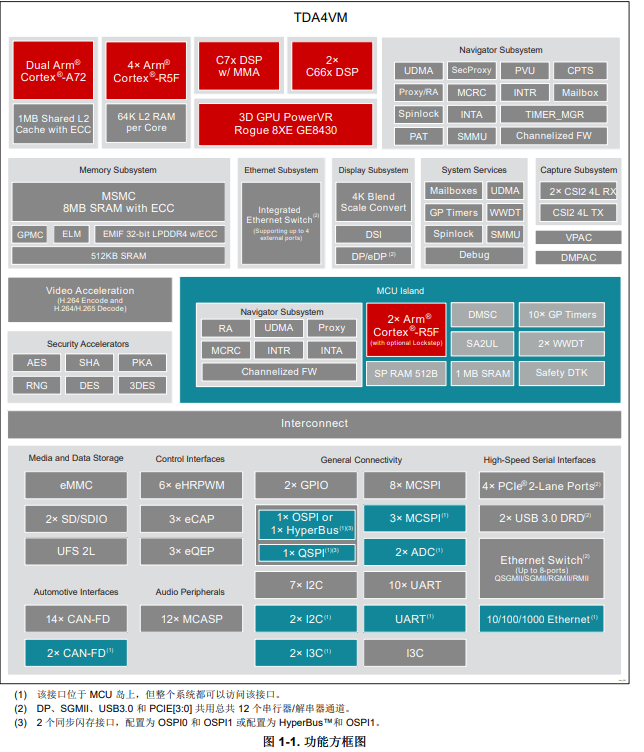
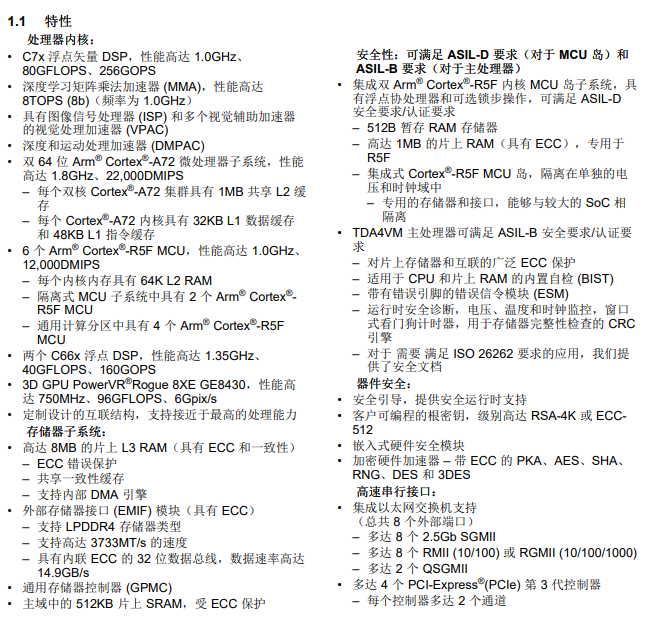
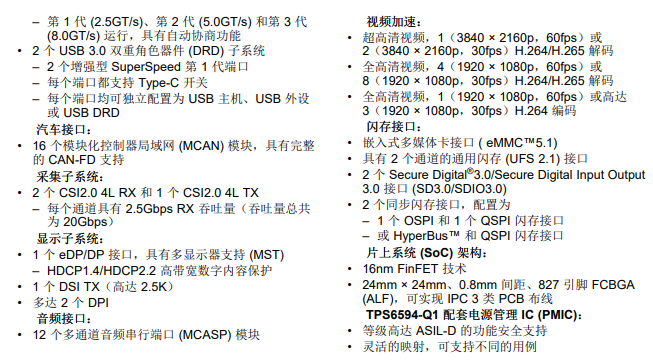
TDA4功能框图:
10软件平台
自动驾驶软件架构:用于自动驾驶的SOA中间件
地图与定位
【自动驾驶】运动规划丨轨迹规划丨Frenet坐标转换
https://zhuanlan.zhihu.com/p/109193953
在Frenet坐标系中,使用道路的中心线作为参考线,使用参考线的切线向量 t 和法线向量 n 建立一个坐标系。以车辆自身为原点,坐标轴相互垂直,分为s 方向(即沿着参考线的方向,通常被称为纵向,Longitudinal)和 d 方向(即参考线当前的法向,被称为横向,Lateral)。
万字详解自动驾驶定位技术
11 规范
12 CS FS SOTIF















 707
707











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









