







 该博客详细介绍了在长沙市望城区乌山街道进行的无人机航测案例,包括作业流程、模型效果、线划图展示、精度检测以及设备配置。采用1.25cm地面分辨率,经过PPK数据解算和ContextCapture建模,精度检测结果显示平面中误差0.0214m,高程中误差0.0391m,平均边长误差0.0157m。
该博客详细介绍了在长沙市望城区乌山街道进行的无人机航测案例,包括作业流程、模型效果、线划图展示、精度检测以及设备配置。采用1.25cm地面分辨率,经过PPK数据解算和ContextCapture建模,精度检测结果显示平面中误差0.0214m,高程中误差0.0391m,平均边长误差0.0157m。
应用案例
(一) 测试地点
长沙市望城区乌山街道,面积 0.12 平方公里。
(二) 作业流程
按照 1.25cm 的地面分辨率飞行,相对航高 81 米,航向重叠率为 80%,旁向重叠率为 75%,飞行速度 7m/s,实际飞行时间 25 分钟。POS 采用中海达 GPS 静态数据与机载 PPK 数据进行解算,单个相机拍摄照片 630 张。内业建模采用 ContextCapture,立体采集使用裸眼测图软件。
(三) 模型效果


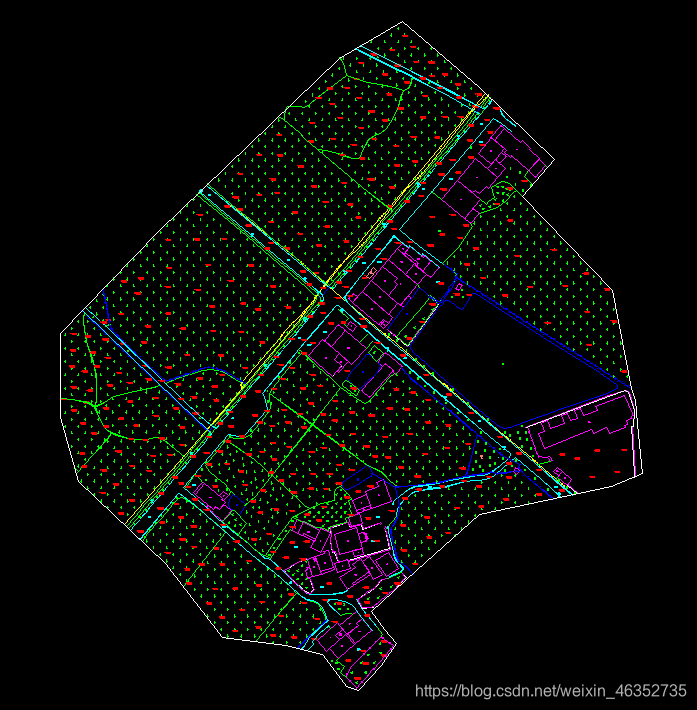
(四) 线划图效果
(五) 精度检测
利用 GPS 随机实地采集 11 个点,选取 22 条房屋边实地量取其边长,将实
测结果与通过模型采集的结果进行比对,结果如下表所示。
表 1:点位检测比对结果表
点号 X(实测) Y(实测) H(实测) X(模型) Y(模型) H(模型) dx dy dh dxy
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1206
1206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











