






 本文对比了真实孔径雷达与合成孔径雷达的工作原理、孔径大小、天线长度、分辨率特性,深入讲解了遥感图像自动解译的挑战与途径,以及航片与卫星遥感影像的区别,涵盖了多光谱与高光谱的区别,以及MSS、TM、ETM+的特性。
本文对比了真实孔径雷达与合成孔径雷达的工作原理、孔径大小、天线长度、分辨率特性,深入讲解了遥感图像自动解译的挑战与途径,以及航片与卫星遥感影像的区别,涵盖了多光谱与高光谱的区别,以及MSS、TM、ETM+的特性。
一、真实孔径雷达和合成孔径雷达的区别:
- 原理概念区别:RAR通过无线电波单次反射成像,SAR是利用一段时间内雷达与目标之间的相对位移,得出特征相干信号的变化,以取得比RAR更加精细的结果。
- 孔径大小区别:原理见下图!
- 天线长度区别:真实孔径雷达的天线越长,接受到的信息越多,而合成孔径雷达的天线被集成在了一起,不需要有真实孔径雷达那么长的天线也可以接收到一样多的信息。
- 合成孔径雷达的特点是分辨率高,能全天候工作,能有效地识别伪装和穿透掩盖物。
- 合成孔径雷达:利用遥感平台的移动,将一个小孔径的天线安装在平台侧方,以代替大孔径的天线,提高方位分辨率的雷达。
- 真实孔径雷达:由一个实际天线在一个位置上接收同一地物回波信号的侧视雷达。要提高其方位分辨率,必须加大天线的孔径。
雷达孔径与最小分辨角度、波长有关
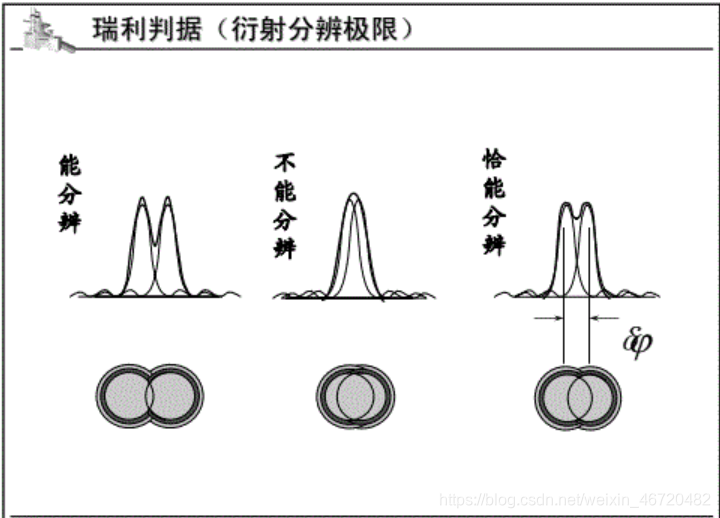
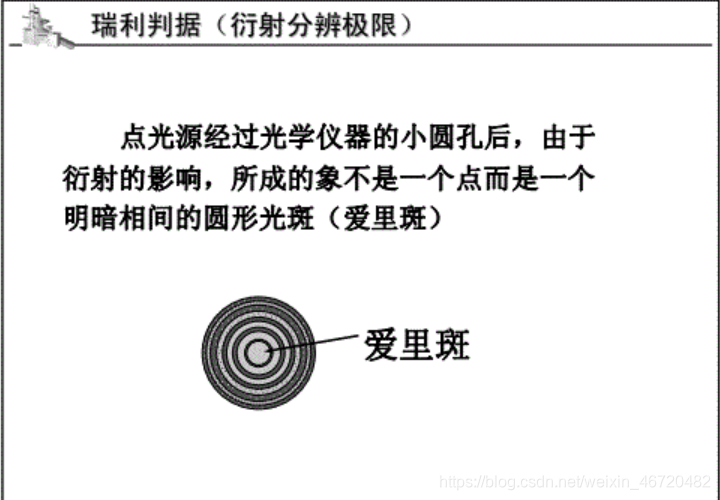
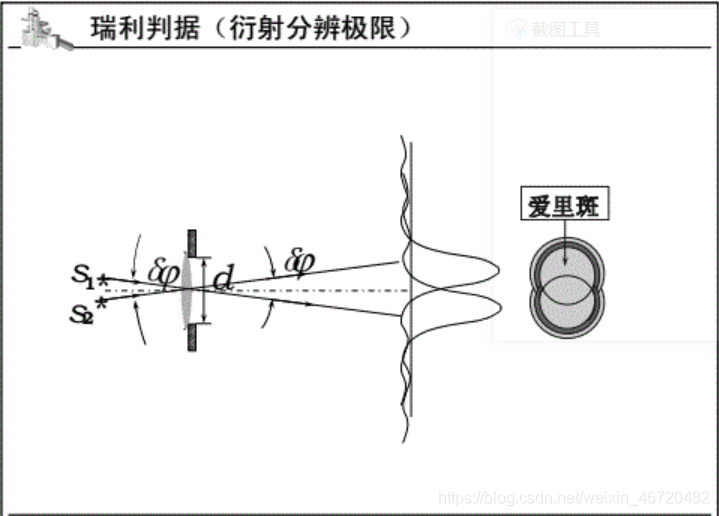
- 瑞丽判据:由于衍射,系统所成的像不再是理想的几何点像,而是有一定大小的光斑(爱里斑),当两个物点过于靠近,其像斑重叠在一起,就可能分辨不出是两个物点的像,即光学系统中存在着一个分辨极限,这个分辨极限通常采用瑞利提出的判据:当一个爱里斑的中央最亮与另一个爱里斑的第一个最暗重合时,刚好能分辨出是两个像。
- ρ=1.22λ/D;ρ表示最小角分辨率,λ为波长,D表示成像时的等效孔径。等效孔径,在真实孔径雷达,就是“天线”的直径。
- 光学遥感的分辨率一般比微波遥感的分辨率要高,在同等孔径的情况下,可见光的波长比微波要小,所以光学遥感的角分辨率要比微波遥感要小,卫星高度差距不大的话,光学对应的地面的分辨率比较小。
真实孔径雷达的分辨率,主要有距离向分辨率和方位向分辨率。
- 距离向分辨率:就是指发射和接收电磁波的方向,距离向的分辨率主要受脉冲信号的宽度 τ 影响,假设一束方波发射出去,遇到距离向的物体A和物体B,它们之间的距离差值为ΔS,ΔS=c*Δt/2,如果两个回波的时间差Δt>=τ,就可以区分这两个目标,当Δt=τ时,刚好可以区分,所以距离向的分辨率为 ρs=c*τ/2,c为光速。
- 方位向分辨率:指图像中沿着雷达运动方向能分辨出两个目标的最短距离。
补充:逆合成孔径雷达(ISAR)是雷达不动目标动,所以叫做“逆”。
二、遥感图像的自动解译
遥感图像自动解译的目的是为了满足人们从海量遥感数据中快速识别与获取不同专题信息的需要。
目前图像自动解译主要依赖地物光谱特征,其解译精度不高,存在“异物同谱和同物异谱”。
解决这一问题的主要途径包括:抽取遥感图像多种特征并综合利用这些特征。
三、航片与卫星遥感影像的区别

四、遥感影像分为两类:一是光学影像,二是合成孔径雷达SAR影像。(对应左右)

区别:
1、按传感器采用的成像波段分类:光学影像通常是指可见光和部分红外波段传感器获取的影像数据。而SAR传感器影像基本属于微波频段,波长通常在厘米级。
2、灰度波段数:可见光影像包含多个波段的灰度信息,以便于识别目标和分类提取。而SAR影像则只记录了一个波段(单波段)的回波信息(也是灰度图),以二进制复数形式记录下来;
但基于每个像素的复数数据可变换提取相应的振幅和相位信息。
- 振幅信息通常对应于地面目标对雷达波的后向散射强度,与目标介质、含水量及粗糙程度密切相关;该信息与可见光成像获得的灰度信息有较大的相关性,可以用来识别目标和分类。
- 相位信息则对应于传感器平台与地面目标的往返传播距离,这与GPS相位测距的原理相同。这也就解释了为什么SAR影像往往带有高程数据信息,可用于三维立体研究。
单一SAR影像的相位信息基本没有统计特征,只有振幅信息可用于目标识别和分类等应用。
3、影像分辨率:SAR影像分辨率相对较低、信噪比较低,所以SAR影像中所包含的振幅信息远达不到同光学影像的成像水平,但其特有的相位信息是其他传感器所无法获取的(主要用于测距),基于相位的干涉建模也是SAR的主要应用方向。
4、成像模式:光学影像通常采用中心投影面域成像(摄影)、推帚式扫描获取数据;而SAR处于信号处理的需要不能采用垂直向下的照射方式而只能通过侧视主动成像方式发射和接受面域雷达波,并通过信号处理(聚焦、压缩、滤波等)手段后期合成对应于地面目标的复数像元(灰度图)。
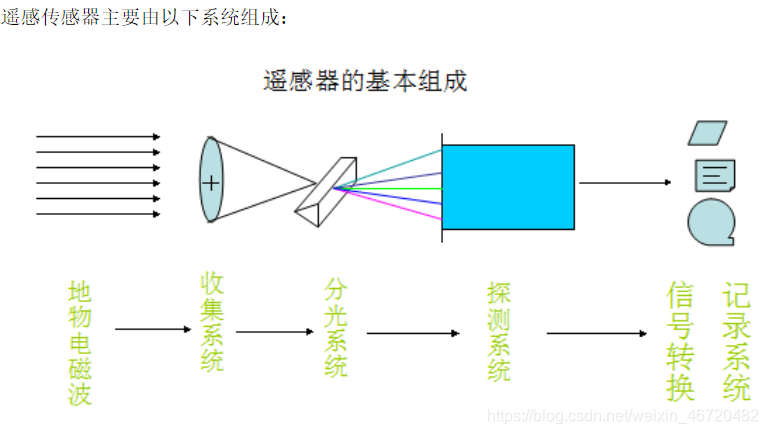
五、遥感传感器类型
遥感传感器根据不同工作的波段,适用的传感器是不一样的。目前遥感中常用的传感器大致上可分为如下几类:
1、摄影类型的传感器:摄影机主要用于可见光波段范围;(单镜头、缝隙式、全景、多光谱)
2、扫描类型的传感器:红外扫描器、多谱段扫描器除了可见光波段外,还可记录近紫外、红外波段的信息;(光机扫描仪:MSS\TM\ETM+;推帚式扫描仪;成像光谱仪(数百个波段))
3、雷达成像类型的传感器:雷达则用于微波波段;
4、非图像类型的传感器
六、多光谱与高光谱的区别
随着光谱分辨率的不断提高,光学遥感的发展过程可分为:全色→彩色→多光谱→高光谱
1、全色波段(Panchromatic band):一般指使用0.5微米到0.75微米左右的单波段,即从绿色往后的可见光波段。因为是单波段,在图上显示是灰度图片。全色遥感影像一般空间分辨率高,但无法显示地物色彩。 实际操作中,我们经常将之与波段影象融合处理,得到既有全色影象的高分辨率,又有多波段影象的彩色信息的影象。
2、多光谱遥感:将地物辐射电磁破分割成若干个较窄的光谱段,以摄影或扫描的方式,在同一时间获得同一目标不同波段信息的遥感技术。
原理:不同地物有不同的光谱特性,同一地物则具有相同的光谱特性。不同地物在不同波段的辐射能量有差别,取得的不同波段图像上有差别。
优点:多光谱遥感不仅可以根据影像的形态和结构的差异判别地物,还可以根据光谱特性的差异判别地物,扩大了遥感的信息量。
3、高光谱遥感
高光谱遥感起源于多光谱遥感,它将成像技术与光谱技术结合在一起,在对目标的空间特征成像的同时,对每个空间像元经过色散形成几十乃至几百个窄波段以进行连续的光谱覆盖,这样形成的遥感数据可以用“图像立方体”来形象的描述。同传统遥感技术相比,其所获取的图像包含丰富的空间、辐射和光谱三重信息。
高光谱遥感具有不同于传统遥感的新特点:
1)波段多:可以为每个像元提供十几、数百甚至上千个波段;
2)光谱范围窄:波段范围一般小于10nm;
3)波段连续:有些传感器可以在350~2500nm的太阳光谱范围内提供几乎连续的地物光谱;
4)数据量大:随着波段数的增加,数据量成指数增加;
5)信息冗余增加:由于相邻波段高度相关,冗余信息也相对增加。
优点:
1)有利于利用光谱特征分析来研究地物;
2)有利于采用各种光谱匹配模型;
3)有利于地物的精细分类与识别;
异同点:
- 光谱分辨率在λ/10数量级范围的称为多光谱(Multispectral),这样的遥感器在可见光和近红外光谱区只有几个波段,如美国 LandsatMSS,TM,法国的SPOT等;
- 光谱分辨率在λ/100数量级范围称之为高光谱遥感(HyPerspectral);随着遥感光谱分辨率的进一步提高,在达到λ/1000时,遥感即进入超高光谱(ultraspectral)阶段;
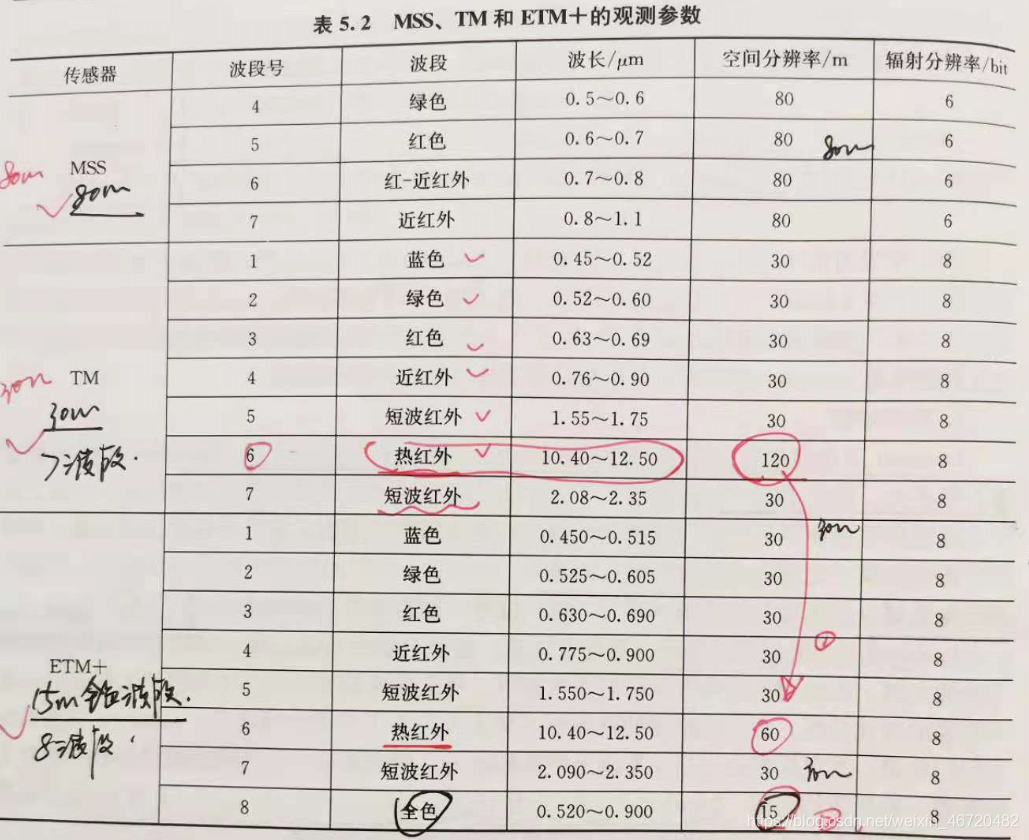
高光谱和多光谱实质上的差别就是:高光谱的波段较多,普带较窄。(Hyperion有233~309波段,MODIS有36个波段),多光谱相对波段较少。(如ETM+,8个波段,分为红波段,绿波段,蓝波段,可见光,热红外(2个),近红外和全色波段),高光谱遥感就是多比多光谱遥感的光谱分辨率更高,但光谱分辨率高的同时空间分辨率会降低。
七、MSS、TM、ETM+的观测参数

















 2262
2262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









