






为了能够选择要运行的下一个任务,调度器本身必须在每个时间切片结束时执行。(重要的是要注意,时间片的结束并不是调度器可以选择要运行的新任务的唯一位置,当当前执行的任务进入Blocked状态,或者当中断将一个高优先级的任务移到Ready状态时,调度程序也将选择一个新任务来立即运行)。周期性中断,称为“滴答中断”,用于此目的。时间片的长度有效地由tick中断频率设置,该频率由FreeRTOSConfig.h中应用程序定义的configTICK_RATE_HZ编译时间配置常量配置。例如,如果configTICK_RATE_HZ被设置为100 (Hz),那么时间片将是10毫秒。如果configTICK_RATE_HZ被设置为1000 (Hz),那么时间片将是1毫秒。configTICK_RATE_HZ的最佳值取决于正在开发的应用程序。两次滴答中断之间的时间称为“滴答周期”。一个时间切片等于一个滴答周期。
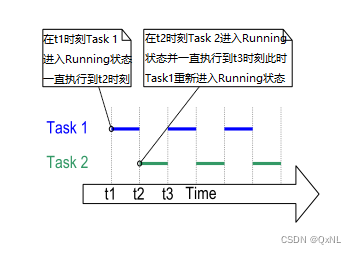
下图以相同的优先级创建了两个任务,因此它们都依次进入和退出运行状态。可以展开显示调度程序本身在执行顺序中的执行情况。
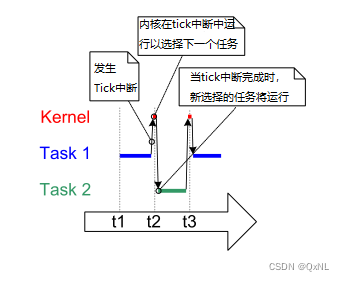
如下图所示,以相同的优先级创建了两个任务,其中顶部一行显示调度程序何时执行,细箭头显示从任务到tick中断,然后从tick中断返回到另一个任务的执行顺序。
FreeRTOS 中滴答定时器 (SysTick) 中断服务函数中也会进行任务切换,滴答定时器中断服务函数如下:
void SysTick_Handler (void)
{
SysTick->CTRL;
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}
在滴答定时器中断服务函数中调用了 FreeRTOS 的 API 函数 xPortSysTickHandler() ,此函数源码如下:
void xPortSysTickHandler( void )
{
/* SysTick以最低的中断优先级运行,所以当这个中断执行时,
所有的中断都必须被解除屏蔽。因此,不需要保存然后恢复中断掩码值,
因为它的值已经已知——因此使用稍微快一点的vPortRaiseBASEPRI()函数来
代替portSET_INTERRUPT_MASK_FROM_ISR()。 */
vPortRaiseBASEPRI();
{
/* Increment the RTOS tick. */
if( xTaskIncrementTick() != pdFALSE )
{
/* 需要上下文切换。
上下文切换在PendSV中断中执行。
暂停PendSV中断。 */
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
}
}
vPortClearBASEPRIFromISR();
}xPortSysTickHandler函数主要实现了关闭中断,通过向中断控制和状态寄存器 ICSR 的 bit28 写入 1 挂起 PendSV 来启动 PendSV 中断,这样就可以在 PendSV 中断服务函数中进行任务切换了,最后打开中断。


















 1138
1138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











