




 本文深入探讨了循环神经网络RNN的问题及LSTM如何解决长期依赖问题。LSTM通过输入、输出和忘记门来管理记忆,有效地解决了梯度消失问题。此外,还介绍了CNN的基本结构,包括卷积层、ReLU激活、池化和全连接层,并通过识别图片为例展示了CNN的工作原理。
本文深入探讨了循环神经网络RNN的问题及LSTM如何解决长期依赖问题。LSTM通过输入、输出和忘记门来管理记忆,有效地解决了梯度消失问题。此外,还介绍了CNN的基本结构,包括卷积层、ReLU激活、池化和全连接层,并通过识别图片为例展示了CNN的工作原理。
长短期记忆神经网络(LSTM)是一种特殊的循环神经网络(RNN)。
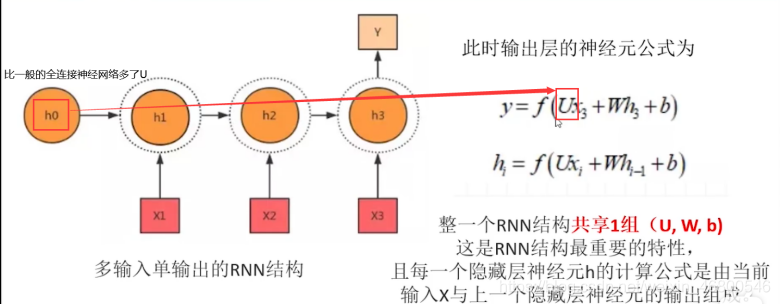
循环神经网络(RNN):是一类以序列数据为输入,在序列的演进方向进行递归且所有节点(循环单元)按链式连接的递归神经网络。
RNN在有序数据上进行学习,为记住数据,会像人一样产生对先前发生事件的记忆
RNN学习过程:
目标信息源经过长时间抵达最后时间点,会产生误差

反向传递时会将误差在每一步乘以自己的参数w。
w<1时,误差传递到初始时间时,会是一个接近0的数,对于初始时刻,误差相当于没有–梯度消失。

W>1时,误差传递到初始时间时,会是一个非常大数–梯度爆炸。

此上为RNN不能长期记忆的办法。
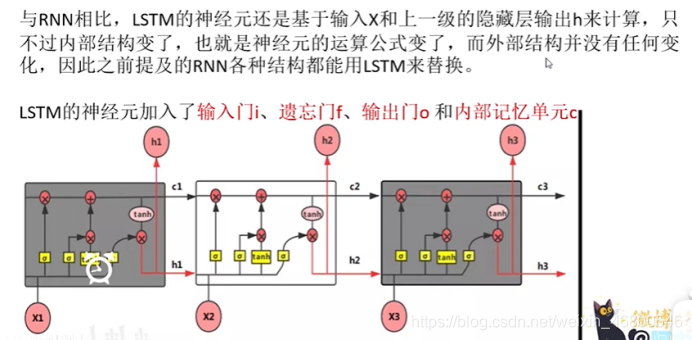
为此LSTM出现。
LSTM多出三个控制器:输入、输出、忘记。

LSTM多了一条全局控制记忆(主线)
原本RNN控制(分线)

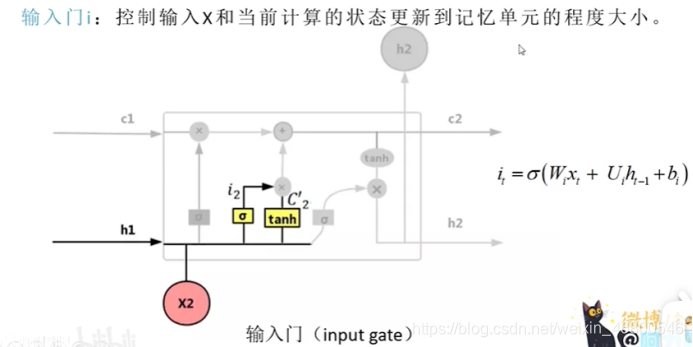
输入:
如果数据非常重要,就会将内容写入主线进行分析
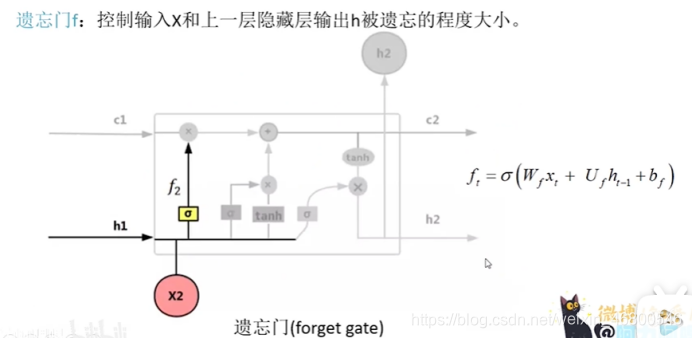
忘记:
如果原来的数据不想要,忘记控制会把原来的数据忘掉按比例替换成现在数据。
主线数据更新,依靠输入和忘记控制。
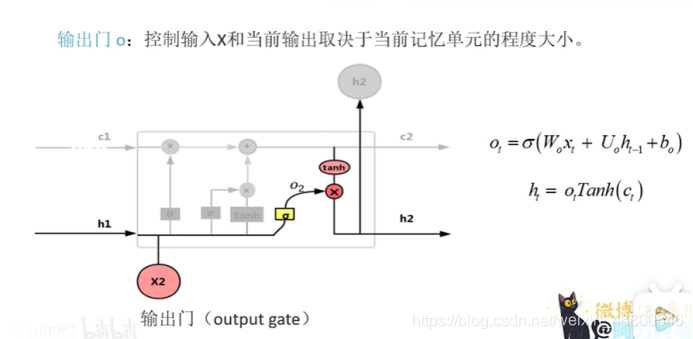
输出:
根据主线和分线数据,判断输出什么内容。
LSTM:
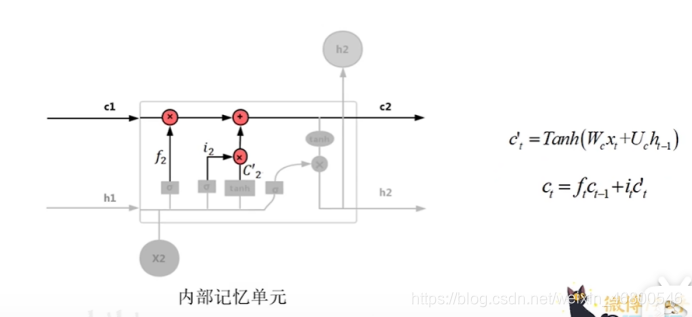
注意:
1.σ一般选择Sigmoid作为激励函数。
2.tanh函数因为收敛速度比sigmoid函数要快,所以作为生成候选记忆的函数。
3.LSTM的激励函数是可以根据自身需求而更改的。
4.一个训练好的LSTM模型,它的每一个门都有各自的(u,W,b)。
5.当输入的序列不存在有用信息时,遗忘门f的值就会接近1,那么输入门i的值接近0,这样过去有用的信息就会被保存;反之当输入的序列存在重要信息时,遗忘门f的值就会接近0,那么输入门i的值接近1,此时LSTM模型遗忘过去的记忆,记录重要记忆。
CNN(卷积神经网络)结构:
CONV(卷积层,进行卷积计算然后求和)
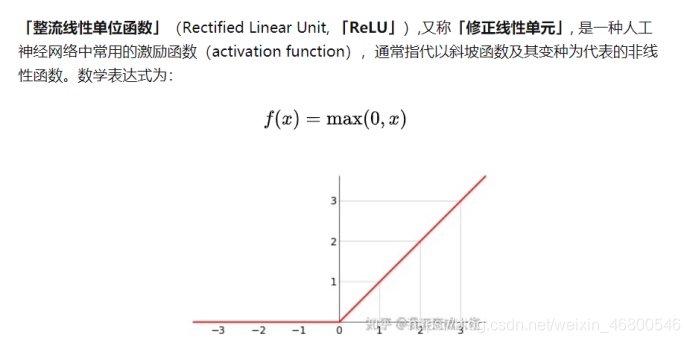
Relu(激励层,激励函数为Relu)
POOL(池化层)
FC(全连接层)
例子:
我们以识别一张照片是X还是O作为我们的识别目的:
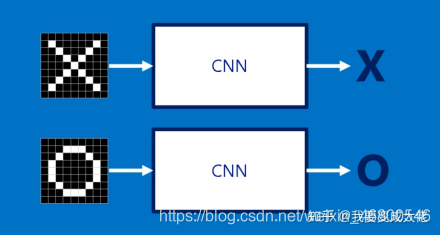
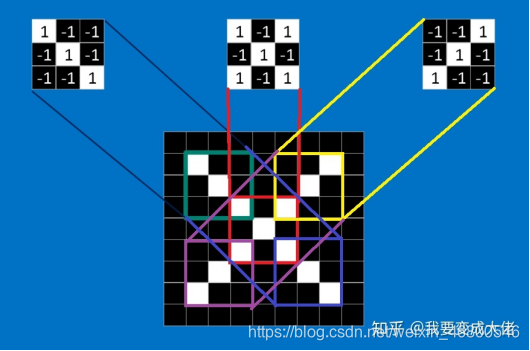
在CNN模型中,会比较特征(两张图片的的各个局部)。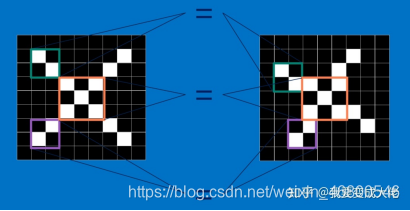
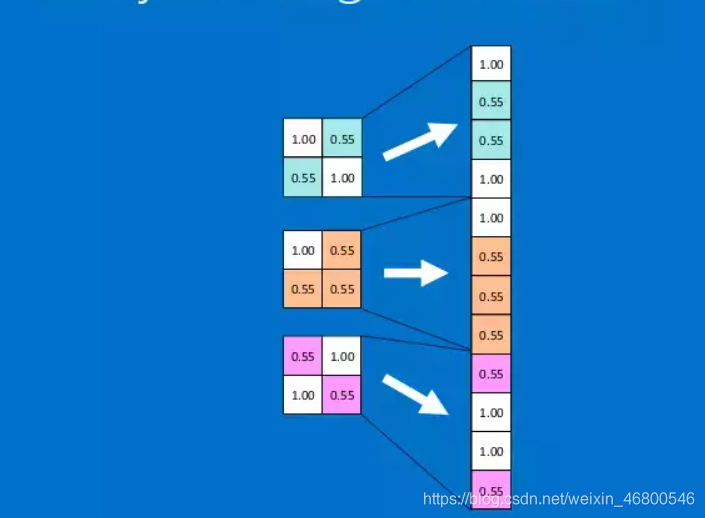
特征会捕捉图片中的共同要素,如下所示,所选出的三个矩阵被认为成最重要的特征。
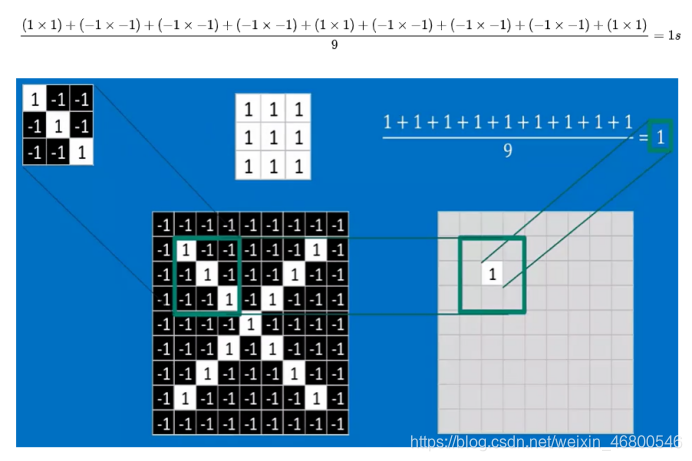
卷积层(Convolution Layer)
卷积的目的是为了计算特征与图片局部的相符程度。
将每一个特征中矩阵的点与对应选中矩阵的点相乘,最后累加,除以矩阵里面数的个数,最终得到一个数字,放入新的矩阵中。如下图:
将这个特征矩阵沿着该图片每次滑动一格,最终得到的一个新的矩阵,如下图所示:
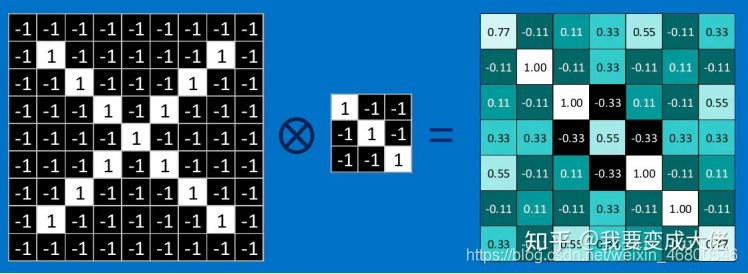
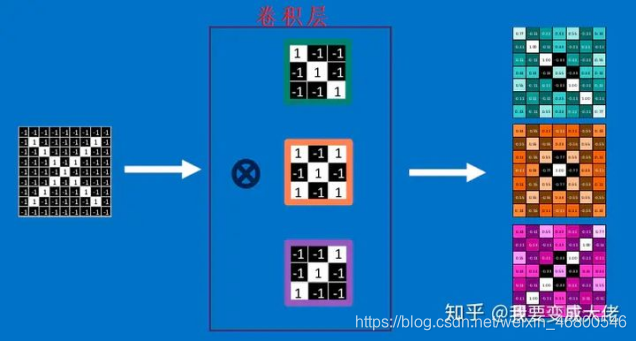
新的矩阵中的数字越接近1,则与对应位置的特征越接近。分别与三个特征进行卷积的结果如下所示:
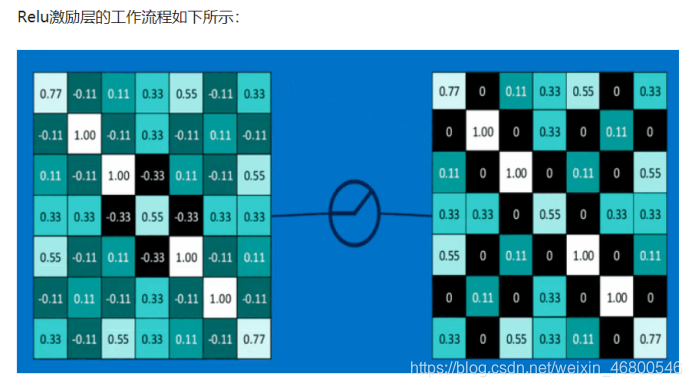
Relu激励层

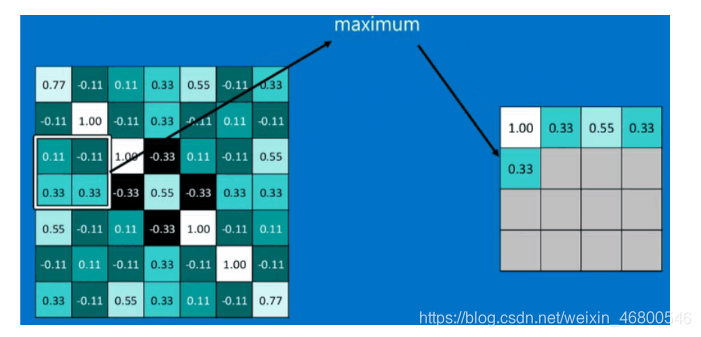
池化(Pooling)
一般我们用最大池化(寻找图像区域中的最大值)和平均池化(计算每个图像区域的平均值)。如图为最大池化:
对所有上一层得到的矩阵进行池化:
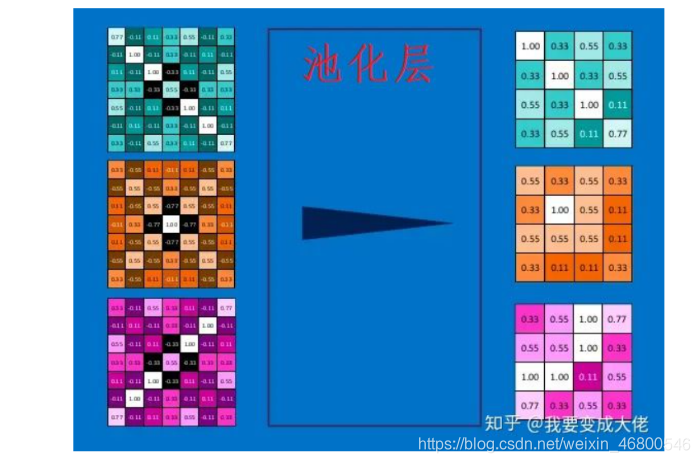
加大网络层数更好的降维:

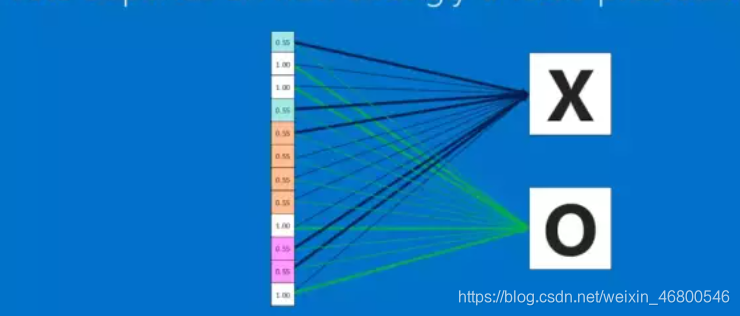
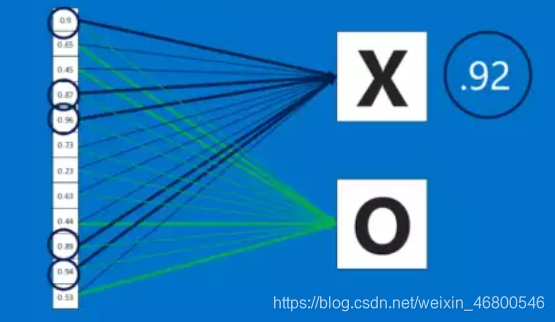
全连接层(Fully connected layers)
得到降维后的矩阵,将其放入全连接层中。
参考:
https://www.bilibili.com/video/BV1o4411R7B1?p=2
https://mp.weixin.qq.com/s/G5hNwX7mnJK11Cyr7E5b_Q

















 1081
1081

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









