







限幅平均滤波法是一种数字信号处理技术,用于滤除噪声对信号产生的影响。其原理如下:
-
设定一个限制范围,将超出该范围的信号值限制在范围内。
-
对限制范围内的信号值进行平均处理,得到一个平均值。
-
将平均值作为该信号点的输出值。
-
持续对信号进行处理,每个处理周期内取一定数量的信号点进行处理,得到一段时间内的平均值。
-
重复以上过程,最终得到滤波后的信号。
限幅平均滤波法的优点在于简单易实现,且可以有效地去除瞬间的噪声干扰。但缺点是对于长时间存在的恒定噪声无法有效去除。同时,设定合适的限制范围和平均值数量也需要一定的经验和实验验证。
一、C 实现限幅平均滤波法及代码详解
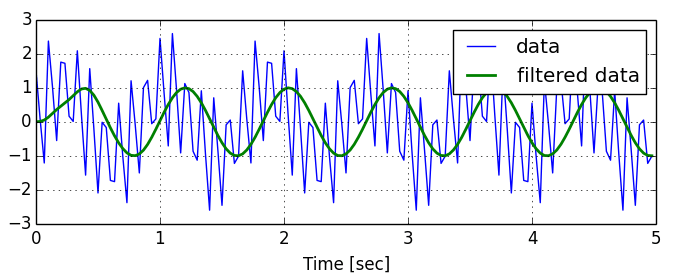
限幅平均滤波法是一种常用的数字信号滤波方法,用于去除噪声信号的影响。该方法通过对信号取绝对值并限制其范围,再进行移动平均的计算,从而实现对信号的平滑处理。
下面是一段 C 语言实现限幅平均滤波法的代码:
#include <stdio.h>
#define N 10 // 信号长度
#define M 3 // 平均滤波器长度
#define MAX 20 // 最大幅值限制
int main() {
int x[N] = {4, 6, 10, 3, 5, 3, 10, 18, 12, 6}; // 原始信号
int y[N] = {0}; // 滤波后的信号
int sum = 0; // 平均滤波器累加和
int i, j; // 计数器
// 限幅平均滤波
for(i = 0; i < N; i++) {
// 绝对值限制
if(x[i] > MAX) {
x[i] = MAX;
} else if(x[i] < -MAX) {
x[i] = -MAX;
}
// 移动平均
sum += x[i];
if(i >= M) {
sum -= x[i - M];
y[i - (M - 1) / 2] = sum / M;
}
}
// 输出滤波结果
printf("Original Signal\tFiltered Signal\n");
for(i = 0; i < N; i++) {
printf("%d\t\t%d\n", x[i], y[i]);
}
return 0;
}
上述代码中,原始信号 x 的长度为 N,平均滤波器的长度为 M,通过变量 sum 记录平均滤波器的累加和。通过循环遍历每个信号点,对信号取绝对值并限制其范围,再进行移动平均的计算,并将结果存入滤波后的信号 y 中。最后,输出原始信号和滤波后的信号。
限幅平均滤波法的优点是简单易懂、易于实现,并且能够较好地去除噪声信号的影响。但是,该方法的缺点在于对于一些峰值极大、时间比较短的噪声信号,容易被误判为有效信号而无法去除。因此,在实际应用中,需要结合具体情况选择合适的滤波方法。

二、C++ 实现限幅平均滤波法及代码详解
限幅平均滤波法是一种常用的数字滤波方法,能够有效地减小噪声对信号的影响。其基本思想是:采用平均滤波对信号进行平滑处理,同时引入限幅器,将滤波后的信号限制在一定范围内,以减小噪声的影响。
以下是 C++ 实现限幅平均滤波法的代码及详解:
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
// 限幅平均滤波函数
double limit_average_filter(vector<double>& data, int N, double A)
{
double sum = 0.0; // 定义变量记录部分数据的累加和
int count = 0; // 定义变量记录参与累加的数据个数
double result = 0.0; // 定义变量记录滤波结果
for(int i=0; i<N; i++)
{
if(abs(data[i]-result) <= A) // 若当前数据与上次滤波结果之差小于阈值 A,则将其加入部分数据中
{
sum += data[i];
count++;
}
if(count != 0) // 若部分数据非空,则计算平均值,并存储为滤波结果
{
result = sum/count;
}
}
return result;
}
int main()
{
// 测试数据
vector<double> data = {3.0, 4.0, 2.0, 3.5, 4.5, 5.0, 6.0, 1.0, 2.0, 9.0};
// 滤波窗口大小
int N = 5;
// 限制阈值
double A = 1.0;
// 调用限幅平均滤波函数
double result = limit_average_filter(data, N, A);
// 输出滤波结果
cout << "滤波结果为:" << result << endl;
return 0;
}
代码中,使用 STL 库中的 vector 类型存储输入数据。在主函数中,指定滤波窗口大小和限制阈值,并调用限幅平均滤波函数对数据进行滤波。函数中,首先对输入数据进行遍历,当当前数据与上次滤波结果之差小于阈值 A 时,将其加入部分数据中,然后计算部分数据的平均值,并存储为滤波结果。
需要注意的是,在实际应用中,滤波窗口大小和限制阈值需要根据具体情况进行调整,以达到更好的滤波效果。
三、Java 实现限幅平均滤波法及代码详解
限幅平均滤波法是一种去除噪声的滤波方法,它可以有效地抑制因单个异常值造成的滤波结果失真问题。下面是 Java 实现限幅平均滤波法的代码及详解。
限幅平均滤波法的实现主要包括以下几个步骤:
- 定义需要使用的变量和常量。其中,n 是滤波器窗口大小,M 是允许的最大偏差值。
int n = 5; // 滤波器窗口大小
int M = 10; // 允许的最大偏差值
- 定义滤波器数据结构,包括当前值、历史值和窗口内数据的总和。
class Filter {
int current; // 当前值
int[] history; // 历史值
int sum; // 窗口内数据的总和
public Filter(int n) {
current = 0;
history = new int[n];
sum = 0;
}
}
- 定义实现限幅平均滤波法的函数。该函数需要接收需要滤波的数据和滤波器数据结构。
int limitAverageFilter(int x, Filter filter) {
// 更新当前值和历史值
filter.current = x;
for (int i = filter.history.length - 1; i > 0; i--) {
filter.history[i] = filter.history[i - 1];
}
filter.history[0] = x;
// 更新窗口内数据的总和
filter.sum += x - filter.history[n - 1];
// 计算平均值和标准差
double average = filter.sum / (double) n;
double stdDev = 0;
for (int i = 0; i < n; i++) {
stdDev += Math.pow(filter.history[i] - average, 2);
}
stdDev = Math.sqrt(stdDev / n);
// 如果标准差小于等于允许的最大偏差值 M,则返回平均值,
// 否则返回当前值。
if (stdDev <= M) {
return (int) average;
} else {
return filter.current;
}
}
- 使用刚刚定义的函数进行滤波。在这个例子中,我们模拟了一组带有噪声的随机数据,并对其进行了限幅平均滤波。
public static void main(String[] args) {
// 模拟一组带有噪声的随机数据
int[] data = new int[100];
Random random = new Random();
for (int i = 0; i < data.length; i++) {
data[i] = random.nextInt(100);
}
// 对数据进行限幅平均滤波
Filter filter = new Filter(n);
for (int i = 0; i < data.length; i++) {
int filtered = limitAverageFilter(data[i], filter);
System.out.println("Data[" + i + "] = " + data[i] + ", Filtered[" + i + "] = " + filtered);
}
}
以上就是 Java 实现限幅平均滤波法的全部代码及详解。















 998
998











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









