







https://blog.csdn.net/weixin_36815313/article/details/111592477
看到了一个讲的很清楚的文章
很清楚的代码:https://www.cnblogs.com/tiandsp/p/12270897.html
close all;clear
density = 0.2;
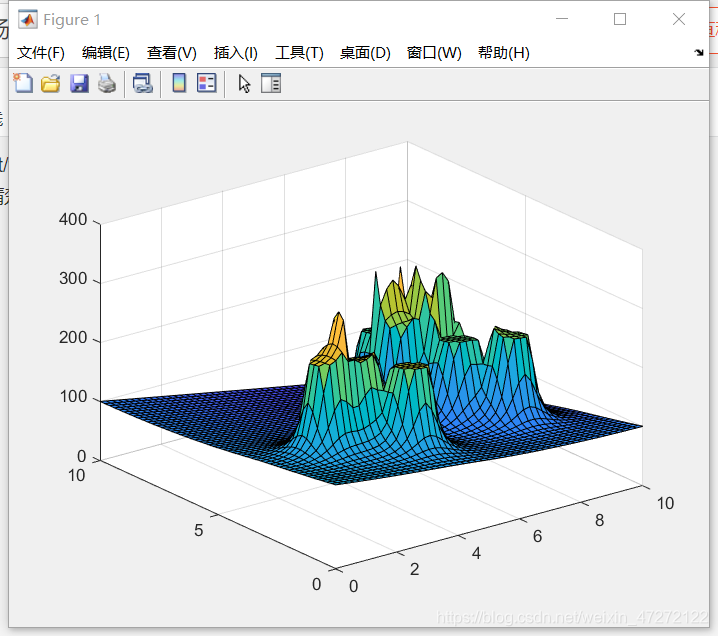
Grid_X = 0:density:10;
Grid_Y = 0:density:10;
Basic_Z = ones(length(Grid_X), length(Grid_Y));
P0 = 20;
a = 20; %斥力影响因素
b = 10; %引力影响因素
Goal = [10,10]; %目标
Obs = [ 3, 2;
3, 3;
5, 7;
5.3, 6;
6, 6;
2, 4;
3, 8;
4, 7;
8, 9]; %障碍物坐标
for k1 = 1: length(Grid_X)
for k2 =1:length(Grid_Y)
X_c = Grid_X(k1);
Y_c = Grid_Y(k2);
rre =[];
rat = sqrt((Goal(1)-X_c)^2 &# 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3744
3744











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









