







本节主要学习以下内容:
1,任务创建和删除的API函数(熟悉)
2,任务创建和删除(动态方法)(掌握)
3,任务创建和删除(静态方法)(掌握)
4,课堂总结(掌握)
一、任务创建和删除的API函数(熟悉)
任务的创建和删除本质就是调用FreeRTOS的API函数
| API函数 | 描述 |
| xTaskCreate() | 动态方式创建任务 |
| xTaskCreateStatic() | 静态方式创建任务 |
| vTaskDelete() | 删除任务 |
- 动态创建任务:任务的任务控制块以及任务的栈空间所需的内存,均由FreeRTOS从FreeRTOS管理的堆中分配
- 静态创建任务:任务的任务控制块以及任务的栈空间所需的内存,需要用户分配提供
1.1 动态创建任务函数
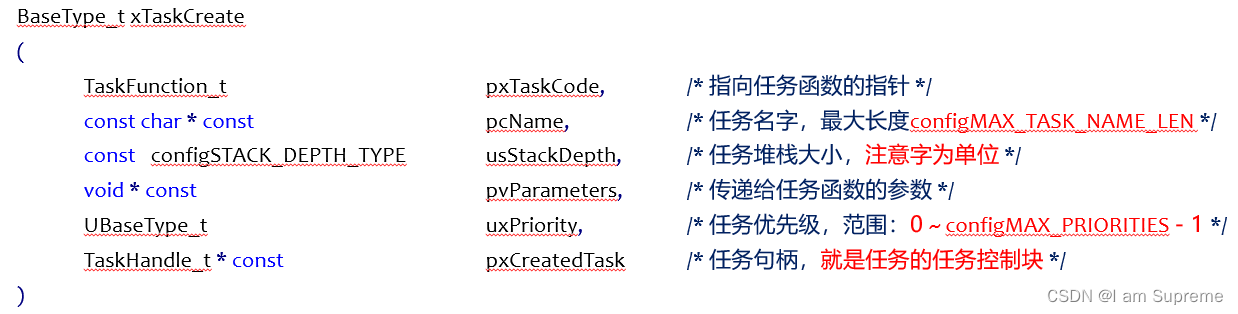 configMAX_TASK_NAME_LEN 默认为16
configMAX_TASK_NAME_LEN 默认为16
pvParameters, 传递给任务函数的参数 ,默认为NULL
uxPriority, 任务优先级,范围:0 ~ configMAX_PRIORITIES - 1 configMAX_PRIORITIES 为32
| 返回值 | 描述 |
| pdPASS | 任务创建成功 |
| errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY | 任务创建失败 |
任务控制块的堆空间不足。
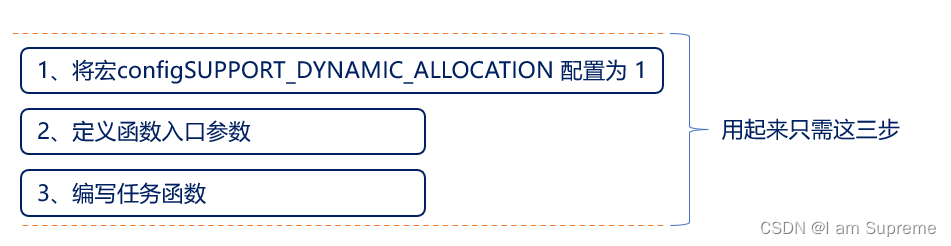
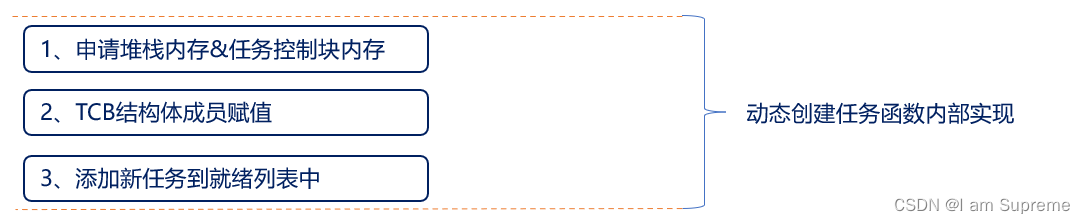
1.2 实现动态创建任务流程
 此函数创建的任务会立刻进入就绪态,由任务调度器调度运行,在就绪态中找到优先级最高的任务去执行。
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行,在就绪态中找到优先级最高的任务去执行。
扩展:任务控制块究竟是什么?通俗来讲就是任务的身份证,保留了任务的一些特征。下面为任务控制块结构体成员的简介:
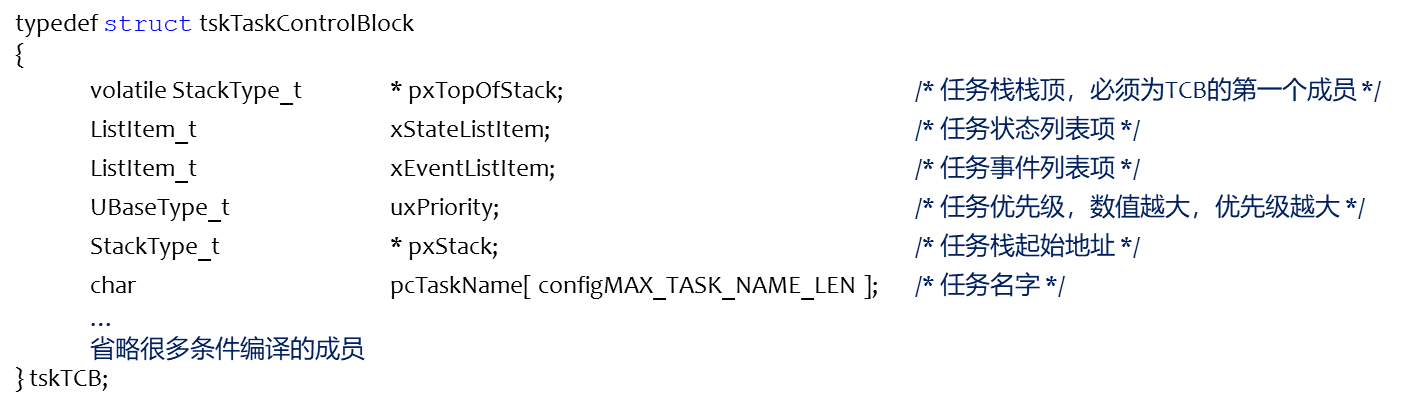 任务栈栈顶,在任务切换时的任务上下文保存、任务恢复息息相关,注意:每个任务都有属于自己的任务控制块,类似身份证。
任务栈栈顶,在任务切换时的任务上下文保存、任务恢复息息相关,注意:每个任务都有属于自己的任务控制块,类似身份证。
1.3 静态创建任务函数
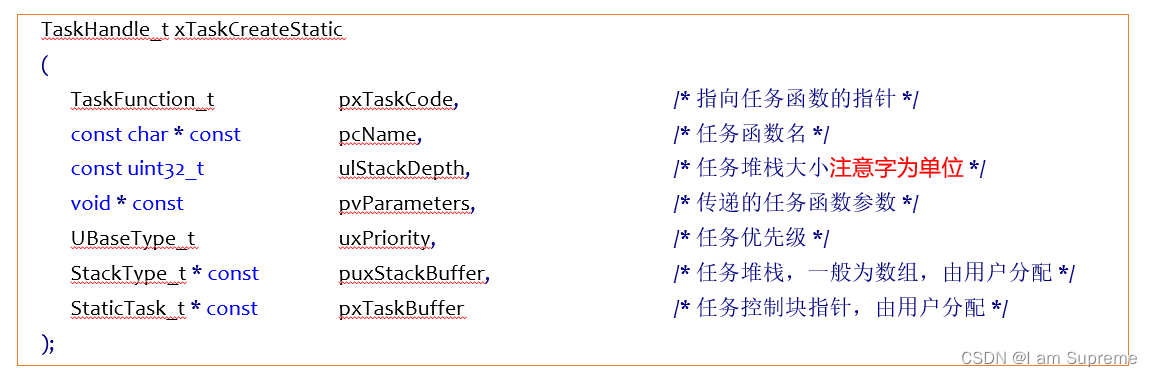
| 返回值 | 描述 |
| NULL | 用户没有提供相应的内存,任务创建失败 |
| 其他值 | 任务句柄,任务创建成功 |
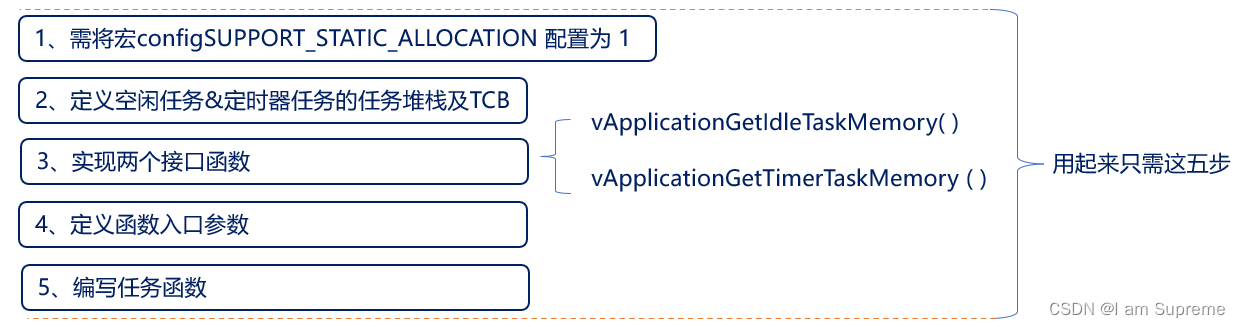
1.4 实现静态创建任务流程
此函数创建的任务会立刻进入就绪态,由任务调度器调度运行
 1.5 任务删除函数
1.5 任务删除函数

| 形参 | 描述 |
| xTaskToDelete | 待删除任务的任务句柄 |
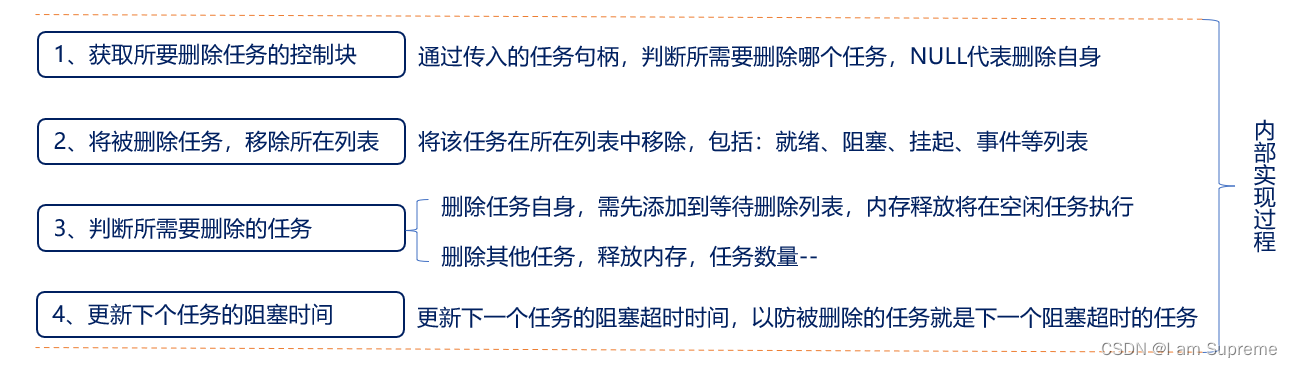
用于删除已被创建的任务,被删除的任务将从就绪态任务列表、阻塞态任务列表、挂起态任务列表和事件列表中移除
注意:
- 1、当传入的参数为NULL,则代表删除任务自身(当前正在运行的任务)
- 2、空闲任务会负责释放被删除任务中由系统分配的内存,但是由用户在任务删除前申请的内存, 则需要由用户在任务被删除前提前释放,否则将导致内存泄露
1.6 删除任务流程

二、任务创建和删除(动态方法)(掌握)
2.1、实验目的
学会 xTaskCreate( ) 和 vTaskDelete( ) 的使用
2.2、实验设计
将设计四个任务:start_task、task1、task2、task3
四个任务的功能如下:
- start_task:用来创建其他的三个任务,只执行一次,执行结束后调用vTaskDelete将自己删除
- task1:实现LED0每500ms闪烁一次
- task2:实现LED1每500ms闪烁一次
- task3:判断按键KEY0是否按下,按下则删掉task1
初始化部分各位小伙伴可以根据自己的板子进行初始化,下面我提供LED、KEY、UART、以及freeRTOS的相关代码。可以根据自己的硬件更改管脚号:
2.3、参考代码
LED.C
#include "./BSP/LED/led.h"
/**
* @brief 初始化LED相关IO口, 并使能时钟
* @param 无
* @retval 无
*/
void led_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
LED0_GPIO_CLK_ENABLE(); /* LED0时钟使能 */
LED1_GPIO_CLK_ENABLE(); /* LED1时钟使能 */
gpio_init_struct.Pin = LED0_GPIO_PIN; /* LED0引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(LED0_GPIO_PORT, &gpio_init_struct); /* 初始化LED0引脚 */
gpio_init_struct.Pin = LED1_GPIO_PIN; /* LED1引脚 */
HAL_GPIO_Init(LED1_GPIO_PORT, &gpio_init_struct); /* 初始化LED1引脚 */
LED0(1); /* 关闭 LED0 */
LED1(1); /* 关闭 LED1 */
}LED.h
****************************************************************************************************
*/
#ifndef __LED_H
#define __LED_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 引脚 定义 */
#define LED0_GPIO_PORT GPIOB
#define LED0_GPIO_PIN GPIO_PIN_1
#define LED0_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define LED1_GPIO_PORT GPIOB
#define LED1_GPIO_PIN GPIO_PIN_0
#define LED1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
/******************************************************************************************/
/* LED端口定义 */
#define LED0(x) do{ x ? \
HAL_GPIO_WritePin(LED0_GPIO_PORT, LED0_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(LED0_GPIO_PORT, LED0_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* LED0 = RED */
#define LED1(x) do{ x ? \
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(LED1_GPIO_PORT, LED1_GPIO_PIN, GPIO_PIN_RESET); \
}while(0) /* LED1 = GREEN */
/* LED取反定义 */
#define LED0_TOGGLE() do{ HAL_GPIO_TogglePin(LED0_GPIO_PORT, LED0_GPIO_PIN); }while(0) /* LED0 = !LED0 */
#define LED1_TOGGLE() do{ HAL_GPIO_TogglePin(LED1_GPIO_PORT, LED1_GPIO_PIN); }while(0) /* LED1 = !LED1 */
/******************************************************************************************/
/* 外部接口函数*/
void led_init(void); /* 初始化 */
#endifKEY.c
#include "./BSP/KEY/key.h"
#include "./SYSTEM/delay/delay.h"
/**
* @brief 按键初始化函数
* @param 无
* @retval 无
*/
void key_init(void)
{
GPIO_InitTypeDef gpio_init_struct; /* GPIO配置参数存储变量 */
KEY0_GPIO_CLK_ENABLE(); /* KEY0时钟使能 */
KEY1_GPIO_CLK_ENABLE(); /* KEY1时钟使能 */
KEY2_GPIO_CLK_ENABLE(); /* KEY2时钟使能 */
WKUP_GPIO_CLK_ENABLE(); /* WKUP时钟使能 */
gpio_init_struct.Pin = KEY0_GPIO_PIN; /* KEY0引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY0_GPIO_PORT, &gpio_init_struct); /* KEY0引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY1_GPIO_PIN; /* KEY1引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY1_GPIO_PORT, &gpio_init_struct); /* KEY1引脚模式设置,上拉输入 */
gpio_init_struct.Pin = KEY2_GPIO_PIN; /* KEY2引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(KEY2_GPIO_PORT, &gpio_init_struct); /* KEY2引脚模式设置,上拉输入 */
gpio_init_struct.Pin = WKUP_GPIO_PIN; /* WKUP引脚 */
gpio_init_struct.Mode = GPIO_MODE_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLDOWN; /* 下拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(WKUP_GPIO_PORT, &gpio_init_struct); /* WKUP引脚模式设置,下拉输入 */
}
/**
* @brief 按键扫描函数
* @note 该函数有响应优先级(同时按下多个按键): WK_UP > KEY2 > KEY1 > KEY0!!
* @param mode:0 / 1, 具体含义如下:
* @arg 0, 不支持连续按(当按键按下不放时, 只有第一次调用会返回键值,
* 必须松开以后, 再次按下才会返回其他键值)
* @arg 1, 支持连续按(当按键按下不放时, 每次调用该函数都会返回键值)
* @retval 键值, 定义如下:
* KEY0_PRES, 1, KEY0按下
* KEY1_PRES, 2, KEY1按下
* KEY2_PRES, 3, KEY2按下
* WKUP_PRES, 4, WKUP按下
*/
uint8_t key_scan(uint8_t mode)
{
static uint8_t key_up = 1; /* 按键按松开标志 */
uint8_t keyval = 0;
if (mode) key_up = 1; /* 支持连按 */
if (key_up && (KEY0 == 0 || KEY1 == 0 || KEY2 == 0 || WK_UP == 1)) /* 按键松开标志为1, 且有任意一个按键按下了 */
{
delay_ms(10); /* 去抖动 */
key_up = 0;
if (KEY0 == 0) keyval = KEY0_PRES;
if (KEY1 == 0) keyval = KEY1_PRES;
if (KEY2 == 0) keyval = KEY2_PRES;
if (WK_UP == 1) keyval = WKUP_PRES;
}
else if (KEY0 == 1 && KEY1 == 1 && KEY2 == 1 && WK_UP == 0) /* 没有任何按键按下, 标记按键松开 */
{
key_up = 1;
}
return keyval; /* 返回键值 */
}
KEY.h
****************************************************************************************************
*/
#ifndef __KEY_H
#define __KEY_H
#include "./SYSTEM/sys/sys.h"
/******************************************************************************************/
/* 引脚 定义 */
#define KEY0_GPIO_PORT GPIOH
#define KEY0_GPIO_PIN GPIO_PIN_3
#define KEY0_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOH_CLK_ENABLE(); }while(0) /* PH口时钟使能 */
#define KEY1_GPIO_PORT GPIOH
#define KEY1_GPIO_PIN GPIO_PIN_2
#define KEY1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOH_CLK_ENABLE(); }while(0) /* PH口时钟使能 */
#define KEY2_GPIO_PORT GPIOC
#define KEY2_GPIO_PIN GPIO_PIN_13
#define KEY2_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOC_CLK_ENABLE(); }while(0) /* PC口时钟使能 */
#define WKUP_GPIO_PORT GPIOA
#define WKUP_GPIO_PIN GPIO_PIN_0
#define WKUP_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* PA口时钟使能 */
/******************************************************************************************/
#define KEY0 HAL_GPIO_ReadPin(KEY0_GPIO_PORT, KEY0_GPIO_PIN) /* 读取KEY0引脚 */
#define KEY1 HAL_GPIO_ReadPin(KEY1_GPIO_PORT, KEY1_GPIO_PIN) /* 读取KEY1引脚 */
#define KEY2 HAL_GPIO_ReadPin(KEY2_GPIO_PORT, KEY2_GPIO_PIN) /* 读取KEY2引脚 */
#define WK_UP HAL_GPIO_ReadPin(WKUP_GPIO_PORT, WKUP_GPIO_PIN) /* 读取WKUP引脚 */
#define KEY0_PRES 1 /* KEY0按下 */
#define KEY1_PRES 2 /* KEY1按下 */
#define KEY2_PRES 3 /* KEY2按下 */
#define WKUP_PRES 4 /* KEY_UP按下(即WK_UP) */
void key_init(void); /* 按键初始化函数 */
uint8_t key_scan(uint8_t mode); /* 按键扫描函数 */
#endif
UART.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */
#if 1
#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */
#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
/* Whatever you require here. If the only file you are using is */
/* standard output using printf() for debugging, no file handling */
/* is required. */
};
#endif
/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{
ch = ch;
return ch;
}
/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
char *_sys_command_string(char *cmd, int len)
{
return NULL;
}
/* FILE 在 stdio.h里面定义. */
FILE __stdout;
/* 重定义fputc函数, printf函数最终会通过调用fputc输出字符串到串口 */
int fputc(int ch, FILE *f)
{
while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */
USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */
return ch;
}
#endif
/***********************************************END*******************************************/
#if USART_EN_RX /* 如果使能了接收 */
/* 接收缓冲, 最大USART_REC_LEN个字节. */
uint8_t g_usart_rx_buf[USART_REC_LEN];
/* 接收状态
* bit15, 接收完成标志
* bit14, 接收到0x0d
* bit13~0, 接收到的有效字节数目
*/
uint16_t g_usart_rx_sta = 0;
uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库使用的串口接收缓冲 */
UART_HandleTypeDef g_uart1_handle; /* UART句柄 */
/**
* @brief 串口X初始化函数
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @retval 无
*/
void usart_init(uint32_t baudrate)
{
g_uart1_handle.Instance = USART_UX; /* USART1 */
g_uart1_handle.Init.BaudRate = baudrate; /* 波特率 */
g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 */
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE);
}
/**
* @brief UART底层初始化函数
* @param huart: UART句柄类型指针
* @note 此函数会被HAL_UART_Init()调用
* 完成时钟使能,引脚配置,中断配置
* @retval 无
*/
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_init_struct;
if(huart->Instance == USART_UX) /* 如果是串口1,进行串口1 MSP初始化 */
{
USART_UX_CLK_ENABLE(); /* USART1 时钟使能 */
USART_TX_GPIO_CLK_ENABLE(); /* 发送引脚时钟使能 */
USART_RX_GPIO_CLK_ENABLE(); /* 接收引脚时钟使能 */
gpio_init_struct.Pin = USART_TX_GPIO_PIN; /* TX引脚 */
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
gpio_init_struct.Alternate = USART_TX_GPIO_AF; /* 复用为USART1 */
HAL_GPIO_Init(USART_TX_GPIO_PORT, &gpio_init_struct); /* 初始化发送引脚 */
gpio_init_struct.Pin = USART_RX_GPIO_PIN; /* RX引脚 */
gpio_init_struct.Alternate = USART_RX_GPIO_AF; /* 复用为USART1 */
HAL_GPIO_Init(USART_RX_GPIO_PORT, &gpio_init_struct); /* 初始化接收引脚 */
#if USART_EN_RX
HAL_NVIC_EnableIRQ(USART_UX_IRQn); /* 使能USART1中断通道 */
HAL_NVIC_SetPriority(USART_UX_IRQn, 3, 3); /* 抢占优先级3,子优先级3 */
#endif
}
}
/**
* @brief Rx传输回调函数
* @param huart: UART句柄类型指针
* @retval 无
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART_UX) /* 如果是串口1 */
{
if((g_usart_rx_sta & 0x8000) == 0) /* 接收未完成 */
{
if(g_usart_rx_sta & 0x4000) /* 接收到了0x0d */
{
if(g_rx_buffer[0] != 0x0a)
{
g_usart_rx_sta = 0; /* 接收错误,重新开始 */
}
else
{
g_usart_rx_sta |= 0x8000; /* 接收完成了 */
}
}
else /* 还没收到0X0D */
{
if(g_rx_buffer[0] == 0x0d)
{
g_usart_rx_sta |= 0x4000;
}
else
{
g_usart_rx_buf[g_usart_rx_sta & 0X3FFF] = g_rx_buffer[0] ;
g_usart_rx_sta++;
if(g_usart_rx_sta > (USART_REC_LEN - 1))
{
g_usart_rx_sta = 0; /* 接收数据错误,重新开始接收 */
}
}
}
}
}
}
/**
* @brief 串口1中断服务函数
* @param 无
* @retval 无
*/
void USART_UX_IRQHandler(void)
{
uint32_t timeout = 0;
uint32_t maxDelay = 0x1FFFF;
HAL_UART_IRQHandler(&g_uart1_handle); /* 调用HAL库中断处理公用函数 */
timeout = 0;
while (HAL_UART_GetState(&g_uart1_handle) != HAL_UART_STATE_READY) /* 等待就绪 */
{
timeout++; /* 超时处理 */
if(timeout > maxDelay)
{
break;
}
}
timeout=0;
/* 一次处理完成之后,重新开启中断并设置RxXferCount为1 */
while (HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t *)g_rx_buffer, RXBUFFERSIZE) != HAL_OK)
{
timeout++; /* 超时处理 */
if (timeout > maxDelay)
{
break;
}
}
}
#endif
UART.h
****************************************************************************************************
*/
#ifndef _USART_H
#define _USART_H
#include "stdio.h"
#include "./SYSTEM/sys/sys.h"
/*******************************************************************************************************/
/* 引脚 和 串口 定义
* 默认是针对USART1的.
* 注意: 通过修改这12个宏定义,可以支持USART1~UART7任意一个串口.
*/
#define USART_TX_GPIO_PORT GPIOA
#define USART_TX_GPIO_PIN GPIO_PIN_9
#define USART_TX_GPIO_AF GPIO_AF7_USART1
#define USART_TX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* 发送引脚时钟使能 */
#define USART_RX_GPIO_PORT GPIOA
#define USART_RX_GPIO_PIN GPIO_PIN_10
#define USART_RX_GPIO_AF GPIO_AF7_USART1
#define USART_RX_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOA_CLK_ENABLE(); }while(0) /* 接收引脚时钟使能 */
#define USART_UX USART1
#define USART_UX_IRQn USART1_IRQn
#define USART_UX_IRQHandler USART1_IRQHandler
#define USART_UX_CLK_ENABLE() do{ __HAL_RCC_USART1_CLK_ENABLE(); }while(0) /* USART1 时钟使能 */
/*******************************************************************************************************/
#define USART_REC_LEN 200 /* 定义最大接收字节数 200 */
#define USART_EN_RX 1 /* 使能(1)/禁止(0)串口1接收 */
#define RXBUFFERSIZE 1 /* 缓存大小 */
extern UART_HandleTypeDef g_uart1_handle; /* UART句柄 */
extern uint8_t g_usart_rx_buf[USART_REC_LEN]; /* 接收缓冲,最大USART_REC_LEN个字节.末字节为换行符 */
extern uint16_t g_usart_rx_sta; /* 接收状态标记 */
extern uint8_t g_rx_buffer[RXBUFFERSIZE]; /* HAL库USART接收Buffer */
void usart_init(uint32_t baudrate); /* 串口初始化函数 */
#endif
freertos_demo()如下:
一定得先更改宏!!!!

#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate((TaskFunction_t ) start_task,
(char * ) "start_task",
(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(TaskHandle_t * ) &start_task_handler );
vTaskStartScheduler(); /*必须得加上:任务是由调度器来调度的,所以要开启任务调度,不开启则不切换任务*/
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 这个函数是用来关闭中断的*/
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
xTaskCreate((TaskFunction_t ) task3,
(char * ) "task3",
(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(TaskHandle_t * ) &task3_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
/* 任务二,实现LED1每500ms翻转一次 */
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
/* 任务三,判断按键KEY0,按下KEY0删除task1 */
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key = key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler != NULL)
{
printf("删除task1任务\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
}
vTaskDelay(10);
}
}
临界区保护一定得加,否则会打印:Task1正在打印,Task2正在打印,Task3正在打印,Task3正在打印······
简单而言:临界区保护,就是保护那些不想被打断的程序段
一创建Task1,Task1比开始任务优先级高,就会抢占开始任务的执行,就会导致,看着好像Task1先运行,然后是Task2,最后是Task3.
这就是临界区的作用。
三、任务的创建和删除(静态方法)(掌握)
3.1、实验目的
学会 xTaskCreate( ) 和 vTaskDelete( ) 的使用
3.2、实验设计
将设计四个任务:start_task、task1、task2、task3
四个任务的功能如下:
- start_task:用来创建其他的三个任务,只执行一次,执行结束后调用vTaskDelete将自己删除
- task1:实现LED0每500ms闪烁一次
- task2:实现LED1每500ms闪烁一次
- task3:判断按键KEY0是否按下,按下则删掉task1
3.3、参考代码
注意:只要将那个宏更改为1了,
/* 内存分配相关定义 */
#define configSUPPORT_STATIC_ALLOCATION 1 /* 1: 支持静态申请内存, 默认: 0 */
#define configSUPPORT_DYNAMIC_ALLOCATION 1 /* 1: 支持动态申请内存, 默认: 1 */那么空闲任务的创建方式就使用的静态创建任务,静态创建任务的任务堆栈以及它的一些任务控制块这些内存是需要用户人为的手动的提供给FreeRTOS的,而动态创建就不用,动态创建是FreeRTOS自动分配的,这就是它们的区别。
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
/* Add the idle task at the lowest priority. */
#if ( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t * pxIdleTaskTCBBuffer = NULL;
StackType_t * pxIdleTaskStackBuffer = NULL;
uint32_t ulIdleTaskStackSize;
/* The Idle task is created using user provided RAM - obtain the
* address of the RAM then create the idle task. */
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );
xIdleTaskHandle = xTaskCreateStatic( prvIdleTask,
configIDLE_TASK_NAME,
ulIdleTaskStackSize,
( void * ) NULL, /*lint !e961. The cast is not redundant for all compilers. */
portPRIVILEGE_BIT, /* In effect ( tskIDLE_PRIORITY | portPRIVILEGE_BIT ), but tskIDLE_PRIORITY is zero. */
pxIdleTaskStackBuffer,
pxIdleTaskTCBBuffer ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */那么通过什么去分配它的内存的呢?就是通过vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );这个函数来分配的,它有三个入口参数(任务控制块的内存、任务堆栈的内存、任务堆栈的大小)。
这个函数声明了,但是没有实现!!!需要我们人为的实现,对应实现静态创建任务流程的第2及第3步,除了空闲任务,还需要实现软件定时器任务,void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer, StackType_t ** ppxTimerTaskStackBuffer,uint32_t * pulTimerTaskStackSize ),它有三个入口参数(任务控制块的内存、任务堆栈的内存、任务堆栈的大小)。搜一下原型拷贝到demo.c里面去实现,具体实现如下:
/******************************************************************************************************/
/* 空闲任务配置 */
StaticTask_t idle_task_tcb;
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE];
/* 软件定时器任务配置 */
StaticTask_t timer_task_tcb;
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH];
/* 空闲任务内存分配 */
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
* ppxIdleTaskTCBBuffer = &idle_task_tcb;
* ppxIdleTaskStackBuffer = idle_task_stack;
* pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/* 软件定时器内存分配 */
void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,
StackType_t ** ppxTimerTaskStackBuffer,
uint32_t * pulTimerTaskStackSize )
{
* ppxTimerTaskTCBBuffer = &timer_task_tcb;
* ppxTimerTaskStackBuffer = timer_task_stack;
* pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}这样流程的第二三步就实现了,注意:软件定时器是可选的,如果不使能软件定时器,那么软件定时器这个函数就不用去实现。
接下来流程的第四步:定义函数入口参数,也就是说静态创建任务函数的入口参数。
freertos_demo()如下
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
StackType_t start_task_stack[START_TASK_STACK_SIZE];
StaticTask_t start_task_tcb;
void start_task( void * pvParameters );
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
StackType_t task1_stack[TASK1_STACK_SIZE];
StaticTask_t task1_tcb;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
StackType_t task2_stack[TASK2_STACK_SIZE];
StaticTask_t task2_tcb;
void task2( void * pvParameters );
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
StackType_t task3_stack[TASK3_STACK_SIZE];
StaticTask_t task3_tcb;
void task3( void * pvParameters );
/******************************************************************************************************/
/* 空闲任务配置 */
StaticTask_t idle_task_tcb;
StackType_t idle_task_stack[configMINIMAL_STACK_SIZE];
/* 软件定时器任务配置 */
StaticTask_t timer_task_tcb;
StackType_t timer_task_stack[configTIMER_TASK_STACK_DEPTH];
/* 空闲任务内存分配 */
void vApplicationGetIdleTaskMemory( StaticTask_t ** ppxIdleTaskTCBBuffer,
StackType_t ** ppxIdleTaskStackBuffer,
uint32_t * pulIdleTaskStackSize )
{
* ppxIdleTaskTCBBuffer = &idle_task_tcb;
* ppxIdleTaskStackBuffer = idle_task_stack;
* pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/* 软件定时器内存分配 */
void vApplicationGetTimerTaskMemory( StaticTask_t ** ppxTimerTaskTCBBuffer,
StackType_t ** ppxTimerTaskStackBuffer,
uint32_t * pulTimerTaskStackSize )
{
* ppxTimerTaskTCBBuffer = &timer_task_tcb;
* ppxTimerTaskStackBuffer = timer_task_stack;
* pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
start_task_handler = xTaskCreateStatic( (TaskFunction_t ) start_task,
(char * ) "start_task",
(uint32_t ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(StackType_t * ) start_task_stack,
(StaticTask_t * ) &start_task_tcb );
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
task1_handler = xTaskCreateStatic( (TaskFunction_t ) task1,
(char * ) "task1",
(uint32_t ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(StackType_t * ) task1_stack,
(StaticTask_t * ) &task1_tcb );
task2_handler = xTaskCreateStatic( (TaskFunction_t ) task2,
(char * ) "task2",
(uint32_t ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(StackType_t * ) task2_stack,
(StaticTask_t * ) &task2_tcb );
task3_handler = xTaskCreateStatic( (TaskFunction_t ) task3,
(char * ) "task3",
(uint32_t ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(StackType_t * ) task3_stack,
(StaticTask_t * ) &task3_tcb );
vTaskDelete(start_task_handler);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(500);
}
}
/* 任务二,实现LED1每500ms翻转一次 */
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
/* 任务三,判断按键KEY0,按下KEY0删除task1 */
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key = key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler != NULL)
{
printf("删除task1任务\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
}
vTaskDelay(10);
}
}
四、总结
呕心沥血画好了思维导图,太大了,不好截图,有需要的小伙伴可以留言或者私信我哦
看都看到这里啦,麻烦各位小伙伴一键三连哦!啾咪啾咪!


















 4775
4775











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











