






1、git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git时页面没有跳转
因为连国外的网站不具有稳定性,可以稍后再登录github。
或者修改ip地址,参考博客:(59条消息) Ubuntu无法访问github的解决方案_呆头南瓜的博客-CSDN博客_ubuntu无法访问github
2、catkin_make遇到cere包报错如下图:
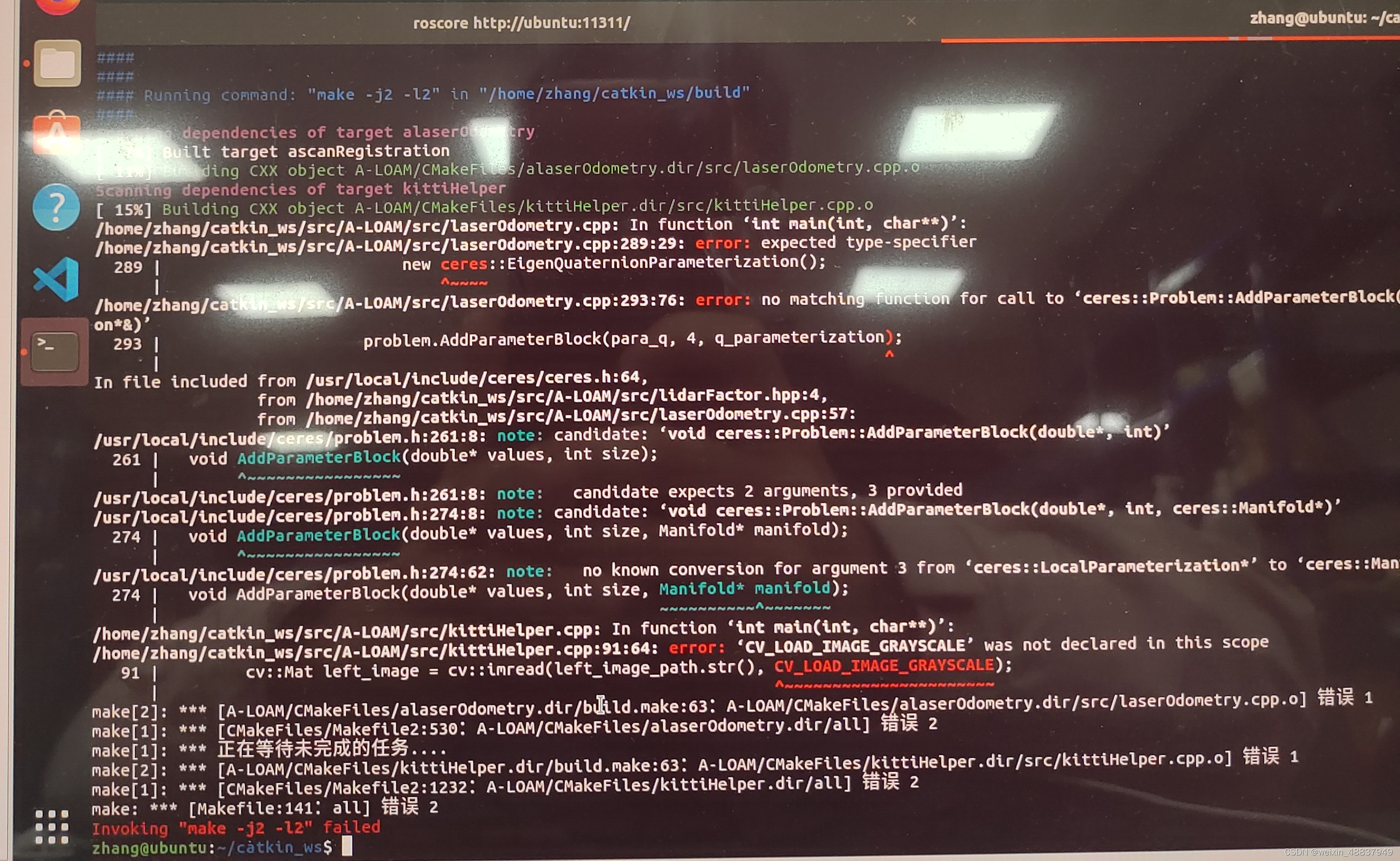
将四个.cpp文件中的/camera_init修改为camera_init
将scanRegistration.cpp中的 #include <opencv/cv.h> 修改为#include <opencv2/imgproc.hpp>
修改kittiHelper.cpp中 CV_LOAD_IMAGE_GRAYSCALE为 cv::IMREAD_GRAYSCALE
如果编译遇到大量未找到Eigen相关错误,将四个.cpp文件中的#include <eigen3/Eigen/Dense>修改为#include <Eigen/Dense>
(原文链接:https://blog.csdn.net/zardforever123/article/details/125570551)
3、roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch时遇到无法定位节点的问题。
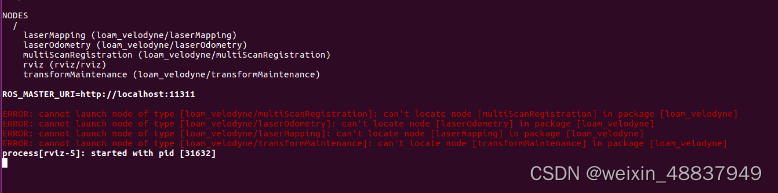
需要先source环境变量(launch内的目录下source一下,运行的数据包的目录下也需要source一下)。
source devel/setup.bash4、无法显示A-LOAM代码的图像和camera_init主题:这个和运行的数据包有关,有的数据包无法显示A-LOAM代码,必须是和rviz关联的数据包
如果数据集是在A-LOAM包的src下则不用每次都source。
如, https://pan.baidu.com/s/1hQqhmpB4wRc5kyJ_QCx94A 提取码: fq6u
5、运行带有PCL库的文件时报错#error PCL requires C++14 or above
#set(CMAKE_CXX_FLAGS "-std=c++11") set(CMAKE_CXX_FLAGS "-std=c++14")6、 Could not find the required component ‘pcl_ros’.
`E:无法定位软件包`
如果ubuntu用的是20.04版本注意安装pcl-ros的时候,使用noetic版本而不是kinetic版本
sudo apt-get install ros-noetic-pcl-ros7、Could not find a package configuration file provided by “Ceres“
参考:(59条消息) Could not find a package configuration file provided by “Ceres“_gaofei forever的博客-CSDN博客8、ubuntu重启后共享文件夹里的包消失
参考:(59条消息) Ubuntu重启之后共享文件夹消失_丶西柚丶的博客-CSDN博客_ubuntu重启后共享文件夹失效















 2575
2575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









