






 本文介绍了2019年CVPR论文中PointWeb的方法,它改进了点云分割中的邻域特征处理,通过AFA模块学习点间及邻域间的交互关系,以减少点云采样带来的特征丢失问题。PointWeb在PointNet++和DGCNN基础上,使用减法构建权重,实验证明其在大场景分割任务中效果优秀。
本文介绍了2019年CVPR论文中PointWeb的方法,它改进了点云分割中的邻域特征处理,通过AFA模块学习点间及邻域间的交互关系,以减少点云采样带来的特征丢失问题。PointWeb在PointNet++和DGCNN基础上,使用减法构建权重,实验证明其在大场景分割任务中效果优秀。
最近看了很多大场景点云分割的论文,它们使用的都是RS采样的方法,随机采样导致最关键的一个问题就是采样的点比较多,而且会导致一些地方的点特征丢失的情况,今天给大家介绍一篇2019年CVPR的文章,PointWeb。自从PointNet开发出来,在点云分割上学习点与点之间的关系(邻域局部特征)成为了一个必然的研究方向,不论是对于Semantic3D还是S3DIS数据集来说,对于大场景点云分割算法还是其他算法来说,都是这个研究方向,学习完特征之后,聚合特征,然后在利用各种方法还原点的特征(还原点的尺度),完成细致的分割任务。
PointWeb其实可以参考PointNet++和DGCNN,前者是利用set absraction去学习邻域局部特征,后者是利用中心点和邻域点的关系学习邻域特征。PointWeb的话有点像增强的DGCNN,它学习不仅仅是中心点和邻域点的关系,还学习了邻域点之间的相互关系,形成一个局部链接的完全网络。
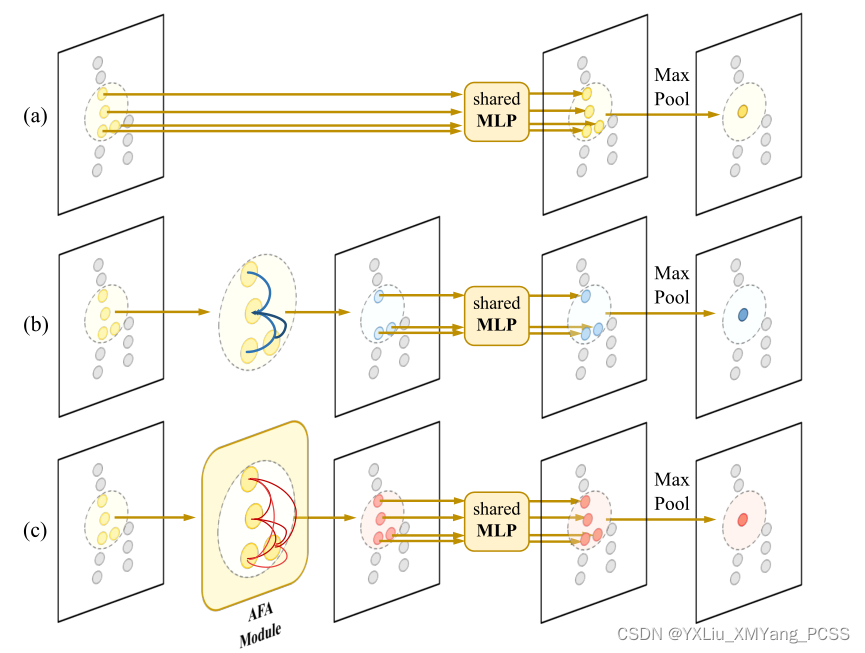
PointWeb学习邻域的模块称之为AFA模块,这部分主要是对特征进行一下增强,增强后的特征为:

对于△Fi是学习的特征,是通过特征调制器,以Fi为输入进行学习的,它由fimp和frel构成,前者是点之前的影响权重,后者是点之间的关系,简单理解就是权重和特征。

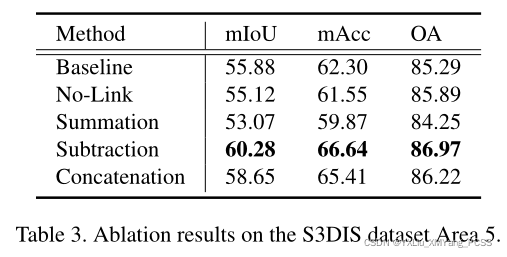
fimp模块的意思是Fj对Fi的影响权重,它构造权重的关系上选择的是特征的减法,后续有消融实验验证哪种关系最好。其中g(Fi,Fj)=Fi-Fj。

frel简单来说直接可以是Fj,但是建模上利用下述公式:

整体的AFA模块的总输出为(与网络模块对应):


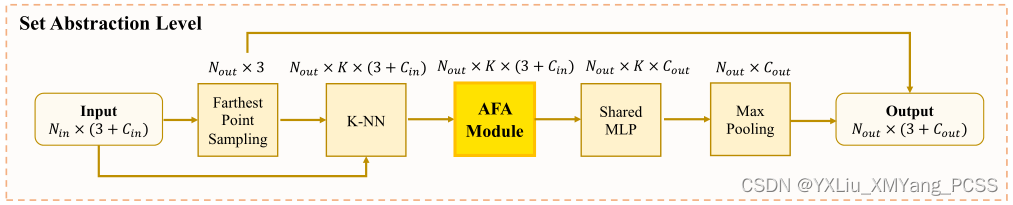
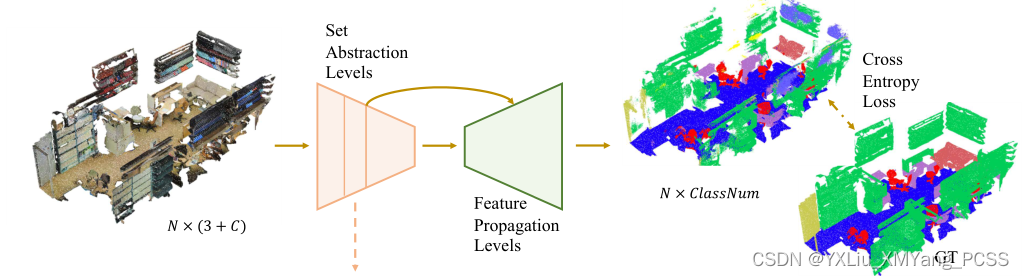
PointWeb的网络结构和其他算法都是类似,编码层进行点云特征的聚合,降点点云的尺度,然后解码层在还原点的特征,完成分割任务。
对于PointWeb的实验部分大家可以自己看论文,对于消融实验来说,他针对加法、减法、拼接、不拼接组成的权重进行了消融实验,发现减法构出的是最好的结果。
论文网址:https://openaccess.thecvf.com/content_CVPR_2019/papers/Zhao_PointWeb_Enhancing_Local_Neighborhood_Features_for_Point_Cloud_Processing_CVPR_2019_paper.pdf


















 1697
1697
评论 1

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包










