







 一.相机标定原理:1.简介在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。2.两类参数同步标定内部参数和外部参数,一般包括两种策略s: 1.光学标定: 利用已知的几何信息(如定长棋盘格)实 现参数求解。 2.自标定: 在静态场景中利用 structure .
一.相机标定原理:1.简介在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。2.两类参数同步标定内部参数和外部参数,一般包括两种策略s: 1.光学标定: 利用已知的几何信息(如定长棋盘格)实 现参数求解。 2.自标定: 在静态场景中利用 structure .
目录
一.相机标定原理:
1.简介
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。
2.两类参数
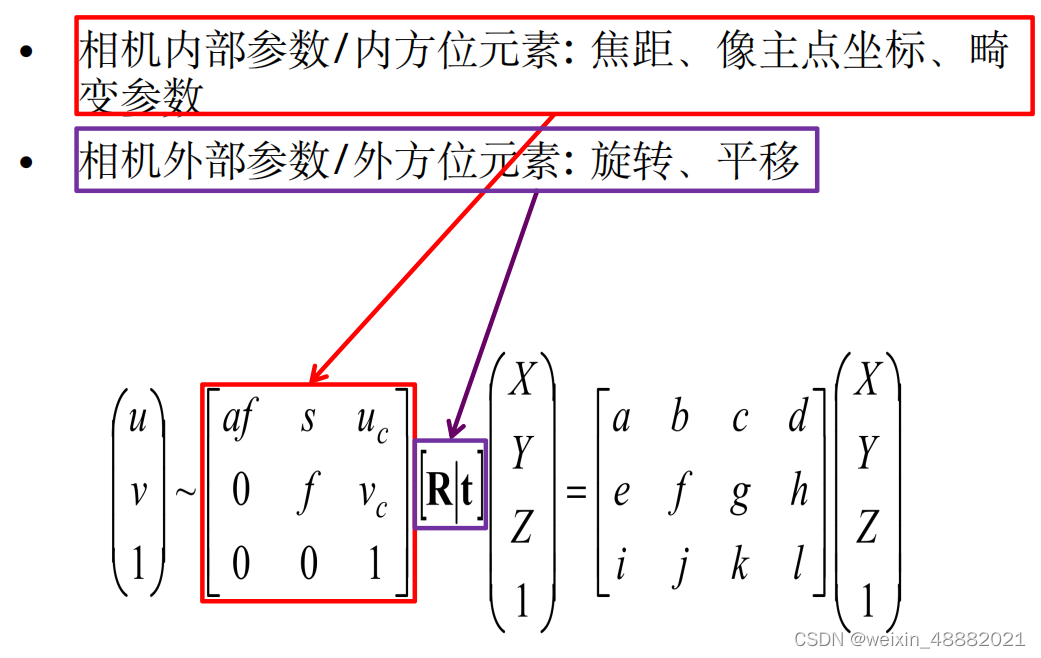
同步标定内部参数和外部参数,一般包括两种策
略
s:
1.光学标定
:
利用已知的几何信息
(
如定长棋盘格
)
实
现参数求解。
2.自标定
:
在静态场景中利用
structure from
motion
估算参数。
3.标定参数线性回归

通过空间中已知坐标的
(
特征
)
点
(
X
i
,
Y
i
,
Z
i
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 942
942











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









