







本文提出了一种 针对球形图像的对抗攻击,称为360-attack,它将对抗性扰动从透视图PV图像转移到最终的对抗性球形图像。给定一个目标球面图像,首先用一组平面PV图像来进行表示,然后对它们进行2D攻击以获得对抗性PV图像。考虑到球面图像和PV图像之间的投影失真问题,提出了一种失真感知攻击,以减少失真对攻击的负面影响。此外,为了重建具有高攻击的最终对抗性球面图像,使用了一种显着性感知融合策略,该策略将球面图像上同一位置的多个逆透视投影合并。实验结果表明,360度攻击在黑盒环境下对干扰球面图像是有效的,我们的攻击还证明了从到
的对抗性可转移性的存在。
主要贡献
- 第一个提出对球形模型进行黑盒攻击的人,称为360-attack,通过从对应的PV图像生成对抗性球形图像。360攻击直接在平面域上进行,最终将扰动传递到球面图像上
- 为了获得攻击球面模型的高度可转移的对抗性PV图像,我们提出了一种新的畸变感知迭代快速梯度符号法(DAI-FGSM),该方法考虑了平面到球面投影畸变引起的扰动退化。从而减轻了投射失真对攻击的负面影响。
- 提出了一种新的基于球谱的显著性检测方法,并提出了一种显著性感知融合策略,将同一位置的多个反向透视投影合并,生成最终的对抗性球面图像。
- 在合成数据集和真实数据集上的大量实验证明了我们对球形图像dnn的360攻击的有效性,也证明了对抗扰动可以从Z2转移到SO(3)组。
360-attack
框架
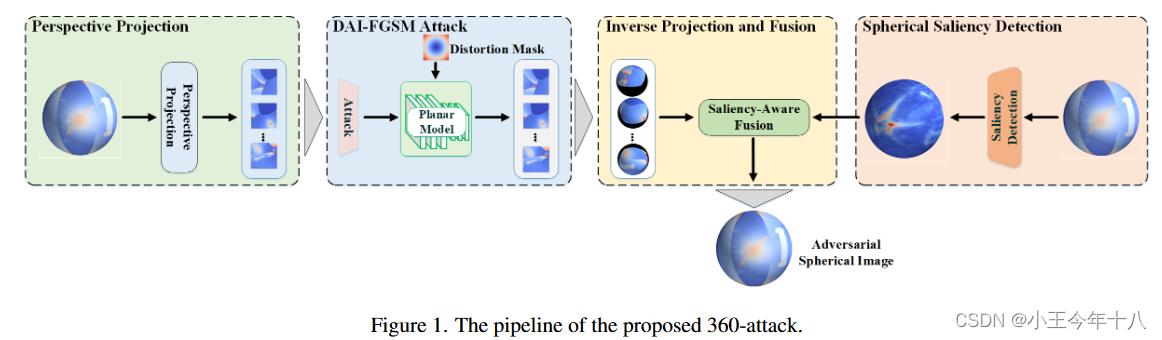
首先,在球体的不同位置渲染多个PV图像。 接下来,攻击一个平面DNN以获得对抗性PV图像。
(球面和PV图像之间的投影引入了失真,并干扰了PV图像中扰动的影响。传统的二维攻击在这种情况下效率比较低,因为它们并没有考虑投影失真的特点,并平等地对待PV图像上的所有像素,使其与球面对应的像素保持一致。)
在360-attack中,对抗PV图像由一种新的畸变感知方法产生,克服了投影畸变.
然后,对抗性PV图像被投影到球体上。由于多幅PV图像的反向投影球面区域互相重叠,我们最终通过显著性感知融合方法将其合并为一幅对抗性球面图像。
Perspective Projection(透视投影)
对于球坐标系中给定的位置P,
分别表示经纬度。如果设置了视场fh × fw和期望的透视分辨率h × w,则可以通过将PV图像上的位置(u, v)映射到3D位置(X, Y, Z)的直线投影来生成PV图像。映射关系:
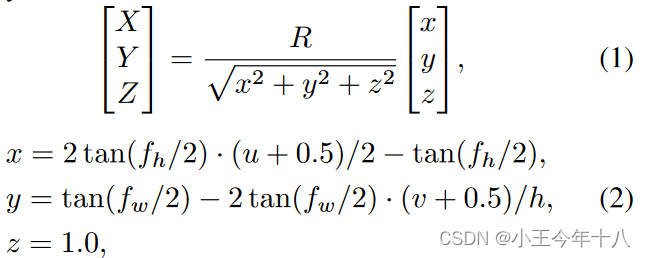
R是旋转矩阵。
Distortion-Aware Iterative Fast Gradient Sign Attack
(这一块公式啥的都不太懂)
给定球面图像x,标签,球面模型Cs,生成对抗样本的公式为:
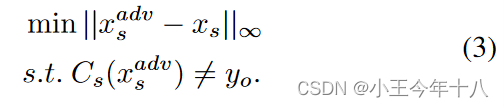
对抗PV图像需要满足
![]() ,在投影后,加在PV图像上的扰动的大小会减少,对于球像上
,在投影后,加在PV图像上的扰动的大小会减少,对于球像上位置,附加扰动由PV像上多个位置的扰动来计算

![]() 球像上的扰动的大小受允许的PV的扰动大小的限制。因此,当对抗性PV像投影到球面图像时,攻击性能会下降,本文呢提出了扭曲感知攻击操作的PV域,以最大限度地减少在反向透视投影过程中扰动的量级损失,3式可以写为
球像上的扰动的大小受允许的PV的扰动大小的限制。因此,当对抗性PV像投影到球面图像时,攻击性能会下降,本文呢提出了扭曲感知攻击操作的PV域,以最大限度地减少在反向透视投影过程中扰动的量级损失,3式可以写为
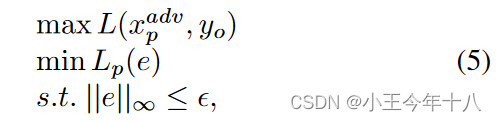
本文寻求一种变换来补偿
,然后第二个目标可以近似的用下式来表示:

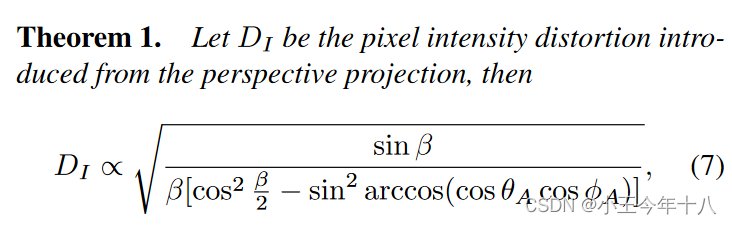
定理1表明PV图像中的像素在投影到球面上时会发生DI畸变。因此DI可以看作是对图像进行掩码操作,我们可以得到
![]()

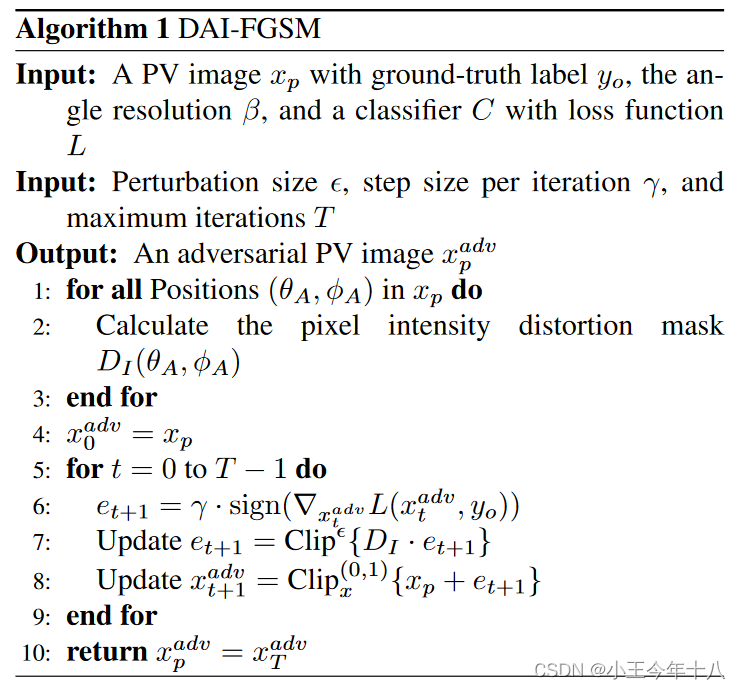
我们建议用两步来求解公式(5):首先,用正常攻击方法来计算扰动。然后用失真掩模DI对它们进行调整。因此,我们推导出的失真补偿函数可以作为任何现有攻击的附加模块,如FGSM、PGD和MI-FGSM。在本文中,我们选择PGD,提出失真感知迭代快速梯度符号法(DAI-FGSM),该方法在每一步都使用失真掩模来控制扰动。算法1总结了DAI-FGSM,其中符号(·)为符号函数,∇为微分算子。
Inverse Perspective Projection and Saliencyaware Fusion
如何将球面上相同位置的多个投影像素合并为一个像素是一个关键问题。我们通过考虑原始球面像素和它的邻居之间的差异来合并投影像素。对于与相邻像素相似的像素,我们考虑更远的球形部分来收集它们的更多信息。而对于与相邻像素明显不同的像素,我们更多地考虑其近球形部分。考虑到显著性映射隐式地揭示了像素间的变化,我们提出了一种显著性感知的球形部件融合方法。
Saliency Detection Based on Spherical Spectral Residual(基于球面光谱残差的显著性检测)
给定球面图像I,其位置上的像素可以用球面调和函数表示为:

:球面谐波系数
:对应的球谐函数
I:球谐波,m:球谐阶
球面图像的光谱图一般是三角形矩阵。为了将残差方法应用到谱图上,我们首先用每列的平均值补全矩阵。之后,我们分别计算频谱的振幅和相位,记为Iam和Iph。接下来,我们计算图像的对数谱残差R(I):
![]()
残差谱包含图像的特定特征。利用残差谱R(I)可以得到原始球面图像的显著性图S

Saliency-aware Fusion for Inversely Projected PV Images(反投影PV图像的显著性感知融合)
球体上的每一个像素都对应一个显著性分数,隐式地表示它与其相邻像素之间的差异程度。
显著性评分用于指导多个反向投影PV图像的融合。
假设一个位置(θ, φ)被k个球面零件覆盖,为了得到它的融合像元值,我们首先计算所有球面零件的中心与它之间的哈弗辛距离,第i个中心(θi, φi)与(θ, φ)之间的距离(记为di)由:

然后利用高斯函数根据显著性评分S(θ, φ)计算球形部分的权重:

最后用归一化高斯权值wi对k个球面部分Ii进行加权,得到(θ, φ)处像素的值:


















 4345
4345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









