






GNSS定位原理简介
GNSS系统的组成与特点
卫星导航电文的主要内容
GNSS两种基本定位原理
GNSS的广泛应用
20230415
1卫星导航定位系统简介
1.1《卫星导航定位原理与应用》课程内容简介
GNSS的定位原理:动态空中后方距离交会
GNSS的定位三要素:
卫星瞬时坐标的确定;导航电文提供 GNSS卫星的导航电文(又叫数据码D码)主要内容括:卫星广播星历
卫星时钟改正参数
电离层改正参数
卫星状态信息
由C/A码码捕获P码的Z跟踪计数
星地距离的测定;测距码和测相两种
定位解算(数学模型与随机模型)
伪距定位:一般用于导航绝对定位,瞬时精度5至10米
载波相位定位:几mm+(1-2)ppm*D
联合国确认的卫星导航定位系统核心供应商
美国GPS 世界第一个且使用最为成熟的系统
俄罗斯GLONASS冷战的产物,频分多址
欧洲GALILEO第一个纯商用系统
中国北斗后起之秀,发展势头强劲
组成
1空中卫星
2地面监控系统 全天候跟踪监控天空中的卫星,编算每一颗卫星的
导航电文并发送给用户。
3用户接收机
GNSS导航电文中的卫星星历也称广播星历,它是由系统的地面控
制系统求得并注几卫星的。它由17个参数组成(6个轨道根数、9个摄动
改正参数和2个时间参考参数)。
任意指定时刻t —— 17个星历参数—— 该时刻卫星在地心坐标系统中三维坐标
距离测量主要采用两种方法:
测量测距码信号到达接收机的伪距(由于各种误差存在,非几
何距离),即伪距测量。
测量卫星载波信号与接收机的参考信号之间的相位差,即载波
相位测量。
根据测定距离方式的不同,GNSS定位方法可分为两种:
伪距定位法:可以获得实时5-10m绝对定位精度,实时相
位平滑伪距差分定位可达分米级精度。
载波相位测量定位:(2-3)mm+(1-2)ppm 静态相对定位测
地实时相位差分1-2cm
广泛应用
导航
授时 天文台 数据通讯 高压输变等
定位 大地测量 工程测量基本取代
GNSS在交通工程上的应用
第一、用GNSS静态测量模式建立各种工程控制网;
公路勘测、桥梁、隧道、航道工程等
第二、用差分GNSS(RTD模式)进行水深测量的平面定位;
第三、用差分GNSS(RTK模式)进行公路勘测中线实时放样;
第四、与DR\MMGIS相结合对各种交通工具(汽车、船只等)
的进行导航服务。
万物互联
课程主要内容
GNSS定位主要原理
1各GNSS的系统组成及其主要特点,重点是GPS的组成及BDS特点;
2GNSS定位的坐标系统与时间系统,重点掌握各坐标系统的转换;
3GNSS的信号结构与导航电文内容,重点掌握卫星瞬时坐标的计算;
4GNSS两种基本定位原理,重点掌握基线解算的数学模型;
5动态差分定位的基本原理,重点掌握网络RTK的定位原理与系统组成;
6GNSS误差来源及其影响,重点掌握如何消除或消弱这些误差影响。
GNSS主要应用
1GNSS测量控制网的建立,重点掌握作业流程、主要内容及其注意事项;
2GNSS精密高程测量,重点掌握GNSS高程测量精度低于平面精度的原因;
3GNSS在交通工程测量中应用,重点了解GNSS在交通中的应用特点。
1.2GPS由来及系统组成
1无线电导航定位系统(罗兰系统)精度100米
2子午卫星导航定位系统 子午卫星+地面监控系统+多普勒接受机 精度1米 不连续 定位慢2天
3GPS全球定位系统 1994年24星组网 21+3备用 目前32个
接收机的主要功能:
1迅速捕获并跟踪卫星
2对所接收到的卫星信号进行变换放大和处理,测定GPS的信号从卫星到接收的传播时间。
3解译出导航电文,实时计算测站的三维坐标,三维速度和时间等数据。
GPS接收机用途类别
导航型 测地型 授时型
GPS接收机工作原理类别
码相关型(导航电文+纯净载波) 平方型(只有载波) 混合型
GPS接收机通道形式类别
多通道 序贯通道 多路复用通道
GPS接收信号频率
单频 双频 三频
1.3我国北斗卫星导航系统组成及其特点
1BDS的系统组成
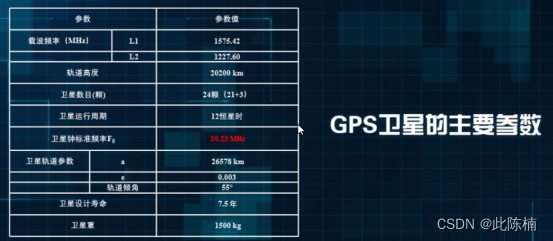
2BDS的主要技术参数
3BDS特点
第一代的试验验证系统1994——2000 本国 有源定位
第二代的区域导航定位系统2012 亚太地区 分层星座布设 14个卫星(5+5+4) 无源定位北斗二代伪距单点定位精度优于六米
第三代全球导航定位系统2020 全球 30个卫星(3+3+24) 基本导航服务短报文通信服务星基增强服务国际搜救服务精密单点定位服务
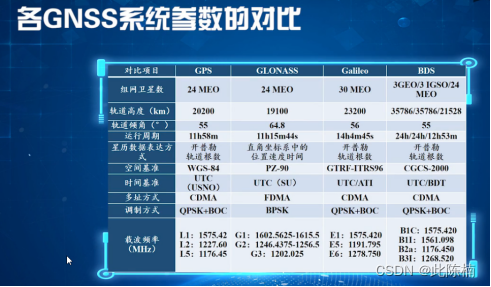
1.4 GLONASS与GALILEO简介及各GNSS系统的比较
GLONASS简介及其现代化
Fdma到cdma
GALILEO简介及其现代化
各GNSS系统参数的对比
1.5 GNSS主要特点及其应用
GNSS的主要特点
高精度
全天候
高效率
多功能
易操作
GNSS的主要应用
GNSS应用的局限性
GNSS的可靠性不足GNSS RTK还有待于进一步的完善GNSS高程测量精度有待于进一步完善GNSS明显不能用于室内、水下和并下等领域的定位
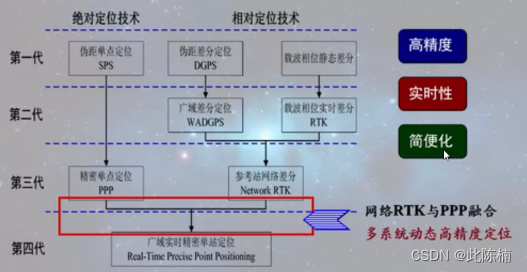
1.6 GNSS未来发展的趋势
GNSS系统发展趋势
GNSS高精度定位技术的研究热点主要有以下几个方面
第一、数据预处理中的周跳的有效探测及各种误差处理方法;
第二、高精度定位中的整周模糊度快速固定及有效确认 (LAMBDA算法等);
第三、非差相位精密单点定位技术;基于CORS的RTK-PPP和非差整数解单点定位技术。要求:精密卫星轨道、卫星钟参数、单台双频接收机星基增强技术
定位精度:动态0.1-0.5m事后0.01-0.03m
第四、网络RTK定位技术;中长基线解算、误差建模、VRS生成技术要求:在区域内架设多个基准站、建立网络定位精度:0.01-0.02m(水平实时)
第五、多系统、多传感器的融合定位;多GNSS紧组合定位、室内外一体化定位5G毫米波雷达与GNSS融合定位
GNSS应用发展趋势
第一 地面增强从区域增强向全国一张网增强过渡
第二网络RTK应用从地基增强转向星基增强 利用GEO卫星进行星基增强,无挂载量限制
第三动态高精度定位由专业应用(如测绘行业)转向大众应用
第四通导遥一体化的PNTRC信息化集成服务
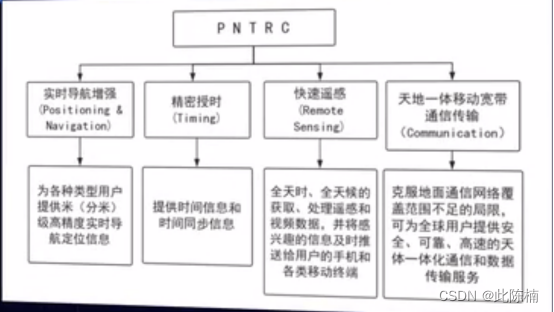
(GEO卫星MEO卫星高分遥感卫星低轨通讯卫星地面5G毫米波雷达)
第五城市峡谷等恶劣环境下的高精度高可靠性定位















 1909
1909











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









