



在写论文的过程中,有的审稿人要求在实验可视化验证时加上热力图可视化结果说明算法的检测效果,下面就是介绍使用Grad-CAM和合并通道的融合方法训练热力图实验结果
话不多说,直接上代码(路径替换看注释):
import warnings
warnings.filterwarnings('ignore')
warnings.simplefilter('ignore')
import torch, yaml, cv2, os, shutil, sys
import numpy as np
np.random.seed(0)
import matplotlib.pyplot as plt
from tqdm import trange
from PIL import Image
from ultralytics.nn.tasks import attempt_load_weights
from ultralytics.utils.torch_utils import intersect_dicts
from ultralytics.utils.ops import xywh2xyxy, non_max_suppression
from pytorch_grad_cam import GradCAMPlusPlus, GradCAM, XGradCAM, EigenCAM, LayerCAM, RandomCAM, EigenGradCAM
from pytorch_grad_cam.utils.image import show_cam_on_image, scale_cam_image
from pytorch_grad_cam.activations_and_gradients import ActivationsAndGradients
def letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better val mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
class ActivationsAndGradients:
""" Class for extracting activations and
registering gradients from targetted intermediate layers """
def __init__(self, model, target_layers, reshape_transform):
self.model = model
self.gradients = []
self.activations = []
self.reshape_transform = reshape_transform
self.handles = []
for target_layer in target_layers:
self.handles.append(
target_layer.register_forward_hook(self.save_activation))
# Because of https://github.com/pytorch/pytorch/issues/61519,
# we don't use backward hook to record gradients.
self.handles.append(
target_layer.register_forward_hook(self.save_gradient))
def save_activation(self, module, input, output):
activation = output
if self.reshape_transform is not None:
activation = self.reshape_transform(activation)
self.activations.append(activation.cpu().detach())
def save_gradient(self, module, input, output):
if not hasattr(output, "requires_grad") or not output.requires_grad:
# You can only register hooks on tensor requires grad.
return
# Gradients are computed in reverse order
def _store_grad(grad):
if self.reshape_transform is not None:
grad = self.reshape_transform(grad)
self.gradients = [grad.cpu().detach()] + self.gradients
output.register_hook(_store_grad)
def post_process(self, result):
logits_ = result[:, 4:]
boxes_ = result[:, :4]
sorted, indices = torch.sort(logits_.max(1)[0], descending=True)
return torch.transpose(logits_[0], dim0=0, dim1=1)[indices[0]], torch.transpose(boxes_[0], dim0=0, dim1=1)[
indices[0]], xywh2xyxy(torch.transpose(boxes_[0], dim0=0, dim1=1)[indices[0]]).cpu().detach().numpy()
def __call__(self, x):
self.gradients = []
self.activations = []
model_output = self.model(x)
post_result, pre_post_boxes, post_boxes = self.post_process(model_output[0])
return [[post_result, pre_post_boxes]]
def release(self):
for handle in self.handles:
handle.remove()
class yolov8_target(torch.nn.Module):
def __init__(self, ouput_type, conf, ratio) -> None:
super().__init__()
self.ouput_type = ouput_type
self.conf = conf
self.ratio = ratio
def forward(self, data):
post_result, pre_post_boxes = data
result = []
for i in trange(int(post_result.size(0) * self.ratio)):
if float(post_result[i].max()) < self.conf:
break
if self.ouput_type == 'class' or self.ouput_type == 'all':
result.append(post_result[i].max())
elif self.ouput_type == 'box' or self.ouput_type == 'all':
for j in range(4):
result.append(pre_post_boxes[i, j])
return sum(result)
class yolov8_heatmap:
def __init__(self, weight, device, method, layer, backward_type, conf_threshold, ratio, show_box, renormalize):
device = torch.device(device)
ckpt = torch.load(weight)
model_names = ckpt['model'].names
model = attempt_load_weights(weight, device)
model.info()
for p in model.parameters():
p.requires_grad_(True)
model.eval()
target = yolov8_target(backward_type, conf_threshold, ratio)
target_layers = [model.model[l] for l in layer]
method = eval(method)(model, target_layers, use_cuda=device.type == 'cuda')
method.activations_and_grads = ActivationsAndGradients(model, target_layers, None)
colors = np.random.uniform(0, 255, size=(len(model_names), 3)).astype(np.uint8)
self.__dict__.update(locals())
def post_process(self, result):
result = non_max_suppression(result, conf_thres=self.conf_threshold, iou_thres=0.65)[0]
return result
def draw_detections(self, box, color, name, img):
xmin, ymin, xmax, ymax = list(map(int, list(box)))
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), tuple(int(x) for x in color), 2)
cv2.putText(img, str(name), (xmin, ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.8, tuple(int(x) for x in color), 2,
lineType=cv2.LINE_AA)
return img
def renormalize_cam_in_bounding_boxes(self, boxes, image_float_np, grayscale_cam):
"""Normalize the CAM to be in the range [0, 1]
inside every bounding boxes, and zero outside of the bounding boxes. """
renormalized_cam = np.zeros(grayscale_cam.shape, dtype=np.float32)
for x1, y1, x2, y2 in boxes:
x1, y1 = max(x1, 0), max(y1, 0)
x2, y2 = min(grayscale_cam.shape[1] - 1, x2), min(grayscale_cam.shape[0] - 1, y2)
renormalized_cam[y1:y2, x1:x2] = scale_cam_image(grayscale_cam[y1:y2, x1:x2].copy())
renormalized_cam = scale_cam_image(renormalized_cam)
eigencam_image_renormalized = show_cam_on_image(image_float_np, renormalized_cam, use_rgb=True)
return eigencam_image_renormalized
def process(self, img_path, save_path):
# img process
img = cv2.imread(img_path)
img = letterbox(img)[0]
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = np.float32(img) / 255.0
tensor = torch.from_numpy(np.transpose(img, axes=[2, 0, 1])).unsqueeze(0).to(self.device)
try:
grayscale_cam = self.method(tensor, [self.target])
except AttributeError as e:
return
grayscale_cam = grayscale_cam[0, :]
cam_image = show_cam_on_image(img, grayscale_cam, use_rgb=True)
pred = self.model(tensor)[0]
pred = self.post_process(pred)
if self.renormalize:
cam_image = self.renormalize_cam_in_bounding_boxes(pred[:, :4].cpu().detach().numpy().astype(np.int32), img,
grayscale_cam)
if self.show_box:
for data in pred:
data = data.cpu().detach().numpy()
cam_image = self.draw_detections(data[:4], self.colors[int(data[4:].argmax())],
f'{self.model_names[int(data[4:].argmax())]} {float(data[4:].max()):.2f}',
cam_image)
cam_image = Image.fromarray(cam_image)
cam_image.save(save_path)
def __call__(self, img_path, save_path, grad_name):
# remove dir if exist
# if os.path.exists(save_path):
# shutil.rmtree(save_path)
# make dir if not exist
if not os.path.exists(save_path):
os.makedirs(save_path, exist_ok=True)
if os.path.isdir(img_path):
for img_path_ in os.listdir(img_path):
name = img_path_.rsplit('.')[0]
end_name = img_path_.rsplit('.')[-1]
self.process(f'{img_path}/{img_path_}', f'{save_path}/{name}_{grad_name}.{end_name}')
else:
self.process(img_path, f'{save_path}/result_{grad_name}.png')
def get_params():
# 绘制热力图方法列表
grad_list = [
'GradCAM',
'GradCAMPlusPlus',
'XGradCAM',
'EigenCAM',
'HiResCAM',
'LayerCAM',
'RandomCAM',
'EigenGradCAM'
]
# 自定义需要绘制热力图的层索引,可以用列表绘制不同层的热力图,如[10, 12, 14, 16, 18],将多层的话会将结果进行汇总到一张图上
layers = [12, 16] # 5, 7, 19, 22, 25
for grad_name in grad_list:
params = {
'weight': r'output_dir/runs/yolo11s/weights/best.pt', # 训练好的权重路径
'device': 'cuda:0', # cpu或者cuda:0
'method': grad_name,
# GradCAMPlusPlus, GradCAM, XGradCAM, EigenCAM, HiResCAM, LayerCAM, RandomCAM, EigenGradCAM
'layer': layers, # 计算梯度的层, 指定层的索引
'backward_type': 'class', # class, box, all
'conf_threshold': 0.2, # 置信度阈值默认0.2, 根据情况调节
'ratio': 0.02, # 建议0.02-0.1,取前多少数据,默认是0.02,只取置信度排序后的前百分之2的目标进行计算热力图。
'show_box': False, # 是否显示检测框
'renormalize': True # 是否优化热力图显示结果
}
yield params
if __name__ == '__main__':
for each in get_params():
model = yolov8_heatmap(**each)
# model第一个参数:单张图片路径或者图片文件夹路径; 第二个参数:保存路径; 第三个参数:绘制热力图方法
# model(r'images/00052.jpg', 'result', each['method'])
model(r'datasets/VisDrone/images/test', r'output_dir/v11s', 'GradCAMPlusPlus')
上一些结果图:
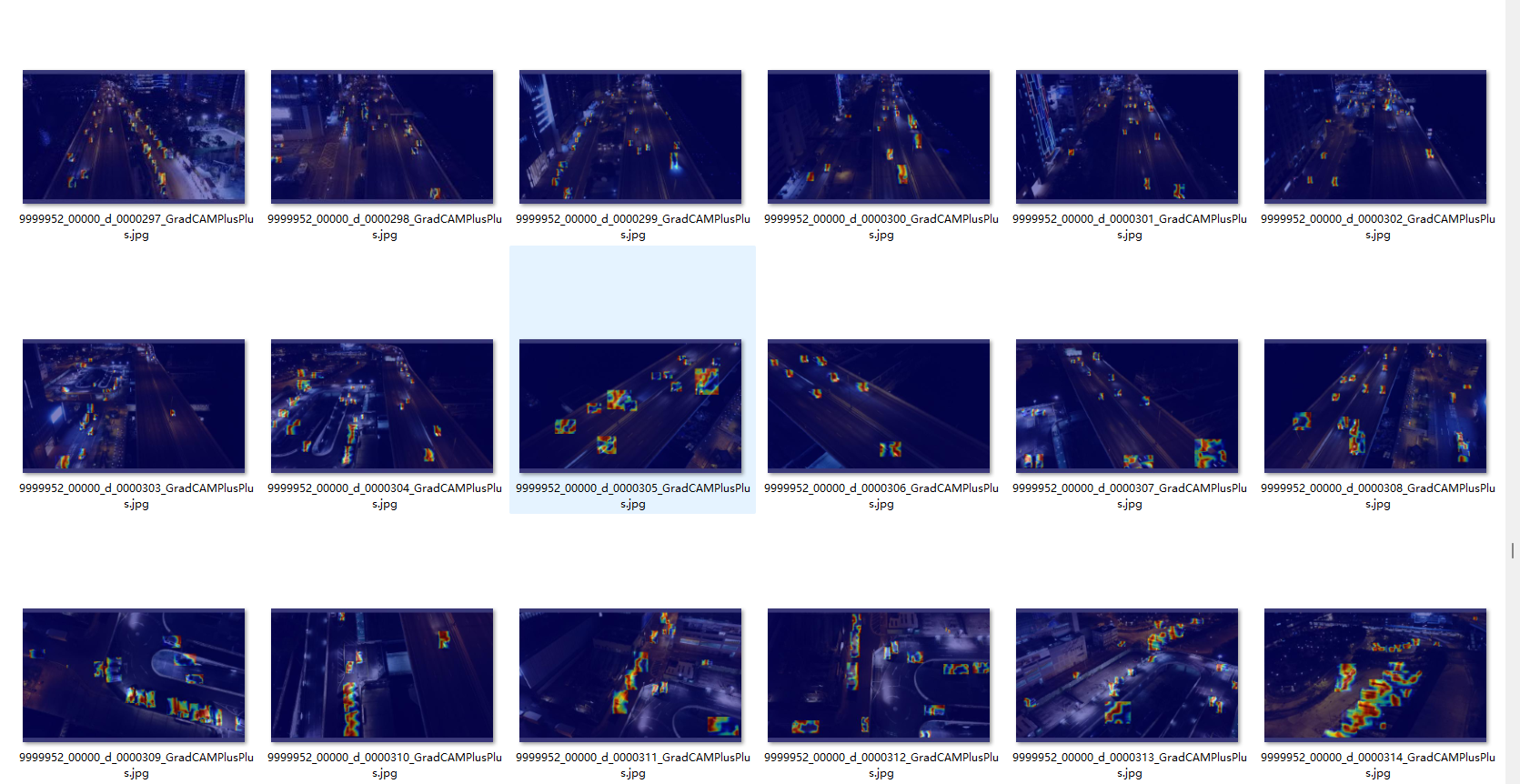
越亮的地方表示检测效果越好哈


















 1055
1055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









