






1. 前言
舱驾融合可以从硬件和软件两个不同的层面去考虑,从不同层面进行融合的概念是完全不同的,目的和作用也完全不一样。
硬件上的融合更多地是基于产品的视角,从成本和设计的维度进行考虑。在一颗SoC芯片里面做融合,才是真正意义上的硬件融合。这个时候,底层软件和通讯方式都会有本质上的改变,成本上的优势也会凸显出来。
软件上的融合更多地是基于技术的视角,从功能的维度进行考虑。软件上的融合需要考虑怎么去改变整体软件架构设计,从而使得新的软件架构能够更加适用于舱驾融合系统。
2. 融合层级的划分
2.1 应用层面的融合
在物理形式上,驾驶域控制器和座舱域控制器采用完全相互独立的两个盒子,但在应用层面,很多功能之间的信息交互通过跨域进行打通,并实现数据融合创新 —— 将智能座舱中的人机交互、沉浸式体验等内容,与智能驾驶的各项功能深度结合、联动,从而提升用户的安全感与舒适感,增强用户对智能化汽车的使用体验。
比如通过以太网或CAN协议把座舱域和智驾域中的信号能够发送出来共享,这样一来,在功能层面就可以做更多的融合创新。如果按以前的策略,两个域的信号基本都是固定写死的,虽然可以通过私有CAN转发到整车CAN总线上,但是,系统需要获取相关信号的时候,还得再去整车CAN总线上查询,非常不方便。
2.2 物理形式上合二为一
座舱域控制器和智驾域控制器合并成一个盒子,内部由多个SoC或者MCU芯片构成。这些芯片用于支持不同的功能,每个芯片以及芯片内的不同核上运行不同的操作系统。这种形式又可再细分成两种方案:A. 座舱和智驾功能分别部署在不同的板子上。B.座舱和智驾功能部署在同一个板子上。
如果座舱和智驾功能分别部署在不同的板子上,用于支持座舱和智驾功能的SoC芯片肯定都会有自己专属的外围电路设计;如果两者的功能部署在同一个板子上,设计方案可以从整体上去考量,包括器件的选型,电路、供电、存储等方面的设计,比如,考虑DDR是否可以共享、EMMC模块是否可以共享等等。整体来讲,B方案比A方案在电子器件、接口、线束等部件的使用量上有一定程度的减少,使得BOM成本相对较低。
2.3 SOC芯片的功能融合
智舱和智驾的功能由一颗单SoC芯片来完成 —— 在芯片上运行虚拟机,通过虚拟机分割出不同的功能模块,来实现不同安全级别需求的舱驾功能。
有一些芯片公司和主机厂在探讨这样的方案,未来也很有可能会有这样的一些芯片产品出现。但是,理想很丰满,现实很骨感,短期内应该是很难看到这样的理想方案落地。
大部分车型无论是对于成本,还是可靠性都比较敏感。同样,开发一个新车型,车型的上市周期也会有一定的要求,所以主机厂一般会首选技术成熟度较高,并且成本已经在行业内能够被分摊下来的成熟方案。另外,不管是主机厂的组织架构,还是对应用层的梳理,都需要很长时间去调整和消化。
3. 厂家的融合方案
3.1 特斯拉
特斯拉是中央计算+区域控制理念的最早实践者,其在2019年量产的Model3车型中率先采用了此架构。其中,中央计算单元CCM融合了影音娱乐模块(座舱)、驾驶辅助系统模块(智驾)以及车内外通信信通模块,只不过三个模块分别部署在不同的板子上,运行着各自独立的操作系统,这算是舱驾融合形式在早期的一个初步尝试。
A.信息娱乐控制单元采用自研的车机操作系统,它基于开源的 Linux 操作系统进行定制开发。
B.驾驶辅助系统控制单元上的MCU运行FreeRTOS,SoC上采用基于Linux进行深度定制开发的Version操作系统。
3.1.1 优势
更高效的通讯:座舱和智驾分属于两个不同控制器的时候,需要通过CAN或者以太网总线进行通讯;而现在,两者虽然还是部署在不同的PCB板子上,但是可以部署在一个盒子里面,两个板子之间通过Switch就可以实现通讯,通讯速率更高。
节省成本:如果两者放在一个盒子里面,散热系统就无需再做两套,可直接共用一套冷却系统。
节省空间,易于布置:集成到一个盒子里,比较容易布置,并且整车空间利用率也会更高。
3.1.2 技术壁垒
电磁干扰设计有难度:不同板子之间都是高速信号在传输,板子之间会存在电磁互相干扰的潜在问题,怎样消除不同板子之间的电磁干扰会存在一定的难度。
需要对整个系统架构有很深的理解:怎么去设计硬件架构和软件架构、需要预留哪些接口、在前期都需要考虑得非常清楚。然而,在国内能够把座舱、智能驾驶和整车控制这三大部分都能想明白的OEM几乎没有。
3.2 德赛西威
基于多SoC芯片的舱驾融合方案,在硬件层面,该中央计算平台搭载英伟达Orin、高通SA8295和黑芝麻华山A1000三大SoC芯片;在功能层面集成智能座舱、智能驾驶、网联服务等多个功能域;在结构形式上采用插拔式结构 —— 算力可伸缩配置,用于满足不同价位车型的多样化需求。

3.3 创时智驾
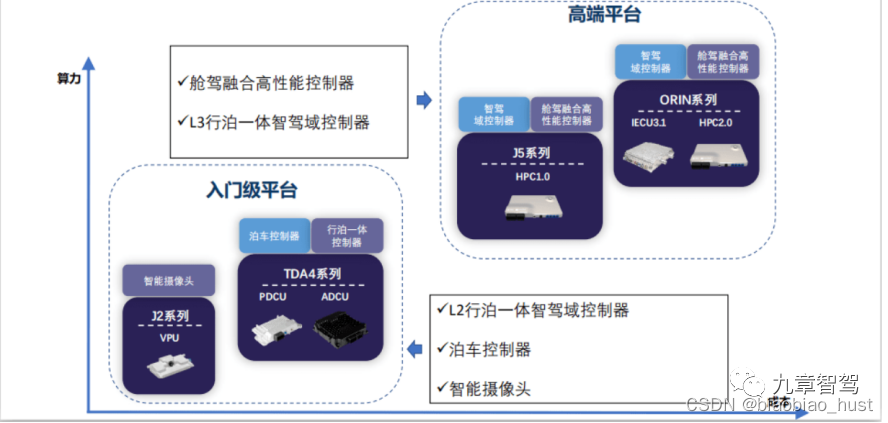
基于多SoC芯片的舱驾融合方案,在硬件层面,正在规划两类高性能的舱驾一体域控制器:基于J5系列芯片和基于Orin系列芯片;在软件层面考虑采用成熟的中间件软件平台、支持多域融合的CarOS软件框架和支持应用软件开发的安全组件产品Safety Copilot。
3.4 中科创达
A.基于高通SA8295的舱泊融合方案(座舱和泊车功能融合)
2022年初,发布基于高通SA8295芯片的硬件平台,实现一芯多屏座舱域控方案,并在高算力(CPU算力200K DMIPS、GPU算力3000G FLOPS、 NPU算力30 TOPS)和多摄像头支持能力下,实现座舱和低速泊车功能的融合,支持360°环视和智能泊车功能。
B. 基于高通SA8795芯片的舱驾融合方案(座舱和智驾功能融合)
基于高通SA8795芯片(预计,CPU算力240K DMIPS、 NPU算力60 TOPS)布局座舱和智能驾驶的跨域融合方案,并计划于2024年实现量产。
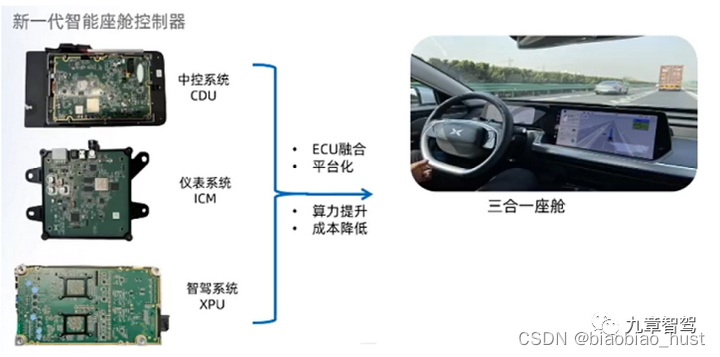
3.5 小鹏
3.5.1 应用层级的融合 —— SR智能辅助驾驶环境模拟
该技术是基于高德第三代车载导航实现的。在技术方案上,将导航与高精地图深度融合,并将智驾系统的感知、决策信息与车道级导航更加精准地匹配。
3.5.2 基于多SoC芯片的舱驾融合方案


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









