






1、什么是自动泊车
自动泊车是通过遍布车辆周围的传感器探测车辆周围环境信息和有效泊车空间,并规划泊车路径,控制车辆的转向和加减速,使车辆半自动或自动完成泊车操作的功能。
2、自动泊车的分类
根据自动化程度的眼睛,自动泊车可分为半自动泊车、全自动泊车、记忆泊车、自主代客泊车四种产品形态。随着自动泊车技术的不断迭代,自动泊车功能的实用性也越来越强。
2.1 自动泊车 APA
2.1.1 半自动泊车 S-APA
半自动泊车(Semi-Automatic Parking Assist,S-APA)基于车辆的超声波传感器实现车位感知,向驾驶员提供车位信息,并进行路径规划,系统自动控制车辆转向系统,驾驶员仅需按照仪表盘的提示对车辆纵向进行控制。半自动泊车需要驾驶员实时监督,并控制档位、加速和减速,对应L1 级;对驾驶过程要求较高,且操作流程复杂,用户体验较差。
2.1.2 全自动泊车 F-APA
全自动泊车(Full-Automatic Parking Assist,F-APA)可以对车辆进行横向和纵向的控制,同时需要驾驶员对车辆进行持续监控和有效接管,以保障泊车安全,属于L2 级别的泊车辅助系统。
泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
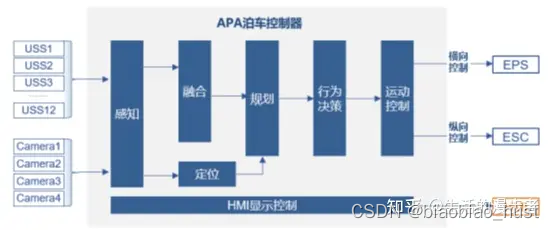
APA自动泊车所以依赖的传感器并不复杂,包括8个安装于汽车前、后的UPA超声波雷达,也就是大家常说的“倒车雷达”,UPA超声波雷达的探测范围近而宽,常见的UPA探测距离为3米。和4个安装于汽车两侧的APA超声波雷达,APA超声波雷达的探测范围远而窄,常见APA最远探测距离为5米。
APA超声波雷达的作用是在汽车低速巡航时,完成空库位的寻找和校验工作。随着汽车低速行驶过空库位,安装在前侧方的APA超声波雷达的探测距离有一个先变小,再变大,再变小的过程。一旦汽车控制器探测到这个过程,可以根据车速等信息得到库位的宽度以及是否是空库位的信息。后侧方的APA在汽车低速巡航时也会探测到类似的信息,可根据这些信息对空库位进行校验,避免误检。使用APA超声波雷达检测到空库位后,汽车控制器会根据自车的尺寸和库位的大小,规划出一条合理的泊车轨迹,控制方向盘、变速箱和油门踏板进行自动泊车。在泊车过程中,安装在汽车前后的8个UPA会实时感知环境信息,实时修正泊车轨迹,避免碰撞。
按照传感器组成的不同,全自动泊车分为基于超声波雷达的全自动泊车、基于超声波与视觉融合的全自动泊车(Fusion Automatic Parking Assist),其中传统超声波泊车方案仅能在由障碍物组成的车位实现泊车功能,应用场景有限,用户满意度不高。而基于超声波与视觉融合的全自动泊车系统有更强的探测物体的能力,可以对车辆周遭环境进行分类,能帮助泊车系统实现更丰富的感知。

2.2 遥控泊车RPA
RPA(Remote Parking Asist)远程遥控泊车辅助系统是在APA自动泊车技术的基础之上发展而来的,车载传感器的配置方案与第一代类似。它的诞生解决了停车后难以打开自车车门的尴尬场景,比如在两边都停了车的车位,或在比较狭窄的停车房。
在汽车低速巡航并找到空车位后,驾驶员将车辆挂入停车挡,就可以离开汽车了。在车外,使用手机发送泊车指令,控制汽车完成泊车操作。遥控泊车涉及汽车与手机的通信,目前汽车与手机最广泛且稳定的通讯方式是蓝牙,虽然没有4G传输的距离远,但4G信号并不能保证所有地方都能做到稳定通讯。RPA远程遥控泊车辅助系统相比于APA加入了与驾驶员通讯的车载蓝牙模块。
2.3 记忆泊车 HPP
记忆泊车(Home-Zone Parking Pilot,HPP)可在相对更远距离和更复杂环境中自主完成泊入和泊出操作。记忆泊车建立在SLAM(Simultaneous Localizationand Mapping,即时定位与地图构建)技术基础之上,利用车身传感器,学习、记录并储存用户常用的下车位置、停车地点及泊车行进路径,建立常用泊车路径的环境特征地图,车辆再次经过该地点时,系统将复现用户的泊车路径来代替驾驶员完成停车场内最后一段距离的低速驾驶和泊车。
在外界环境发生较大变化,记忆泊车功能无法实现时,记忆泊车系统将要求驾驶员接管车辆或者返回原来位置,对应L3 级别。记忆泊车系统应用区域不需要提前采集高精地图,适用于高频、高重复性的泊车行为,可以有效解决家庭区域私人停车位、园区及办公场景下单位固定停车场的泊车问题。
2.4 自主代客泊车 AVP
自主代客泊车(Automated Valet Parking,AVP)是指用户在指定下客点下车,通过手机APP 下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控;用户通过手机APP 下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。
自主代客泊车的特点是车内无人。依靠更精准的感知(需使用高精度地图)、更强大的算力、更先进的自动驾驶算法,自主代客泊车可自动完成智慧停车场内的低速自动驾驶、自主避障、智能搜索车位和车辆泊入/泊出,目前业内公认的将最先实现商业化应用的L4 级自动驾驶功能。
相比于更为成熟的前三代泊车辅助产品,AVP除了要实现泊入车库的功能外,还需要解决从驾驶员下车点低速(小于20km/h)行驶至库位旁的问题。为了能尽可能地安全行驶到库位旁,必须提升汽车远距离感知的能力,前视摄像头成为了最优的传感器方案。地上/地下停车场不像开放道路,场景相对单一,高速运动的汽车较少,对于保持低速运动的自车来说,更容易避免突发状况的发生。
常用的激光雷达和毫米波雷达没被选用的原因是,激光雷达的成本较高,在成本降下来之前,不在大部分车企的量产考虑范围内;毫米波雷达由于感知原理的限制,在低速下的表现并不好,而且在地库中使用时信噪比不高,也不做考虑。
2.5 总结
APA:人在主驾驶位,解放了双手和双脚,但人要观察周围环境,随时准备踩刹车。
RPA:人可以在车外,适用于狭窄停车位(停车后车门不方便打开),但人要像看着小孩子走路一样看着车,随时准备通过手机APP进行刹车。
HPA:可以录制地图,实现固定路线的自主泊车。
AVP:像酒店的车童一样,自动找车位、停车、接驾。在AVP功能上,不同玩家的技术路线不同,大概分为车端和场端两派。

3、自动泊车系统结构
上文讲到的四种自动泊车系统,虽然自动驾驶级别不同,但均包含四大子系统:环境感知系统、中央控制系统、执行系统、人机交互系统。
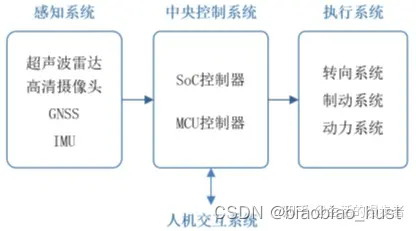
3.1 感知系统
1.超声波传感器
超声波雷达通过发射频率超过40KHz 的超声波,根据时间差测算15cm 至500cm 内障碍物的距离,其测距精度大约是1~3cm 左右。超声波雷达具备短距测距精度高、技术成熟度高、成本低、不受光线条件影响等优势,常用在倒车辅助、自动泊车等系统中。
2.车载摄像头
车载摄像头通过镜头和图像传感器实现图像信息的采集功能,主要功能包括障碍物检测、车道线检测、道路信息读取、地图构建和辅助定位、其他交通参与者探测与识别等。
自动泊车系统使用的车载摄像头是环视摄像头。通过使用布置在车辆前方、后方、左右外后视镜周围的四个方位的环视摄像头,采集车辆四周的影像,经过图像的畸变校正和拼接合成车身周围的全景图,最后加入算法以实现车位线检测、障碍物检测等任务。
3.毫米波雷达
车载毫米波雷达使用天线发射毫米波(波长1~10mm),通过处理回波测得汽车与探测目标的相对距离、速度、角度及运动方向等信息,具备全天候全天时、探测距离较长、探测性能稳定等优势,是高阶自动驾驶的核心传感器。
4.激光雷达
激光雷达利用激光脉冲达成厘米级探测精度,以极高的速率收集距离数据并产生“点云”,实现对外界环境的3D 建模。相较于毫米波雷达,激光雷达在探测精度、探测范围及稳定性方面更有优势,主要用于L3 级别以上高级别的自动驾驶中。激光雷达或将用于自动泊车系统,解决传感器感知局限问题。
5.车身传感器
车身传感器收集转角信息、轮速信息、位置信息等,通过这些信息可以计算出自动驾驶车辆的方向盘转角、行进速度、车辆位置。
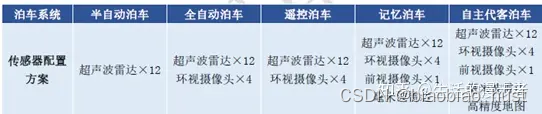
6.传感器配置方案
为保障泊车系统在各种复杂环境下都能实现环境的感知及障碍物、异常事件识别,多传感器融合感知方案成为主流趋势。当前以车端改造为主要技术方案的L2 和L2+级别自动泊车融合方案多采用超声波+视觉融合,L3+泊车系统还需结合前视摄像头、毫米波雷达等多传感器融合感知技术,提升感知可靠性。L4 级别的AVP 还涉及到高精度地图的构建,定期甚至实时更新地图数据。
3.2 中央控制系统
该系统是一个泊车控制器,负责将感知系统采集到的信息进行处理和分析,得出车辆当前的位置、目标的位置以及周边的环境,依据这些参数判断是否具备停车条件,计算最优路径规划,生成相应的控制指令,并通过整车网络将泊车过程中所需的转向力矩、转角信息等信息以电信号形式下发到相关执行器,同时要把需要向驾驶员显示的信息按照输出的逻辑和顺序,通知到HMI端。
3.3 执行系统
执行系统的任务是根据接收到的泊车控制器的指令,控制车辆的方向盘、油门以及制动等,使车辆能够按照规划出来的泊车路径来执行泊车动作,并随时准备接收中断时的紧急停车。

















 2794
2794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









