






在此感谢所有愿意将自己的学习成果进行分享的博主,让我可以有中文资料参考(英语渣的痛谁懂…
py的svgpathtools的库可以实现读取svg图的关键点
https://www.cnpython.com/qa/342993
ICP算法的作用
通过旋转和平移,将两个对应点的距离尽可能的缩小。
先用图解释一下二维ICP工作原理
计算欧式距离最近的两点被认为是对应点,那么我们就将两个点云中的任意两点进行匹配,让匹配后的对应点之间的距离累加最小。
1.我们初始载入图片,获取图的关键点(初始化点云)。
2.然后先将重心重合(平移),每个点以矩阵坐标上相等的点作为暂时的对应点。
3.进行旋转,使两个点云之间的距离平方和最小。
4.判断是否满足需求,不满足重复2,3步骤(迭代获取有意义的对应点).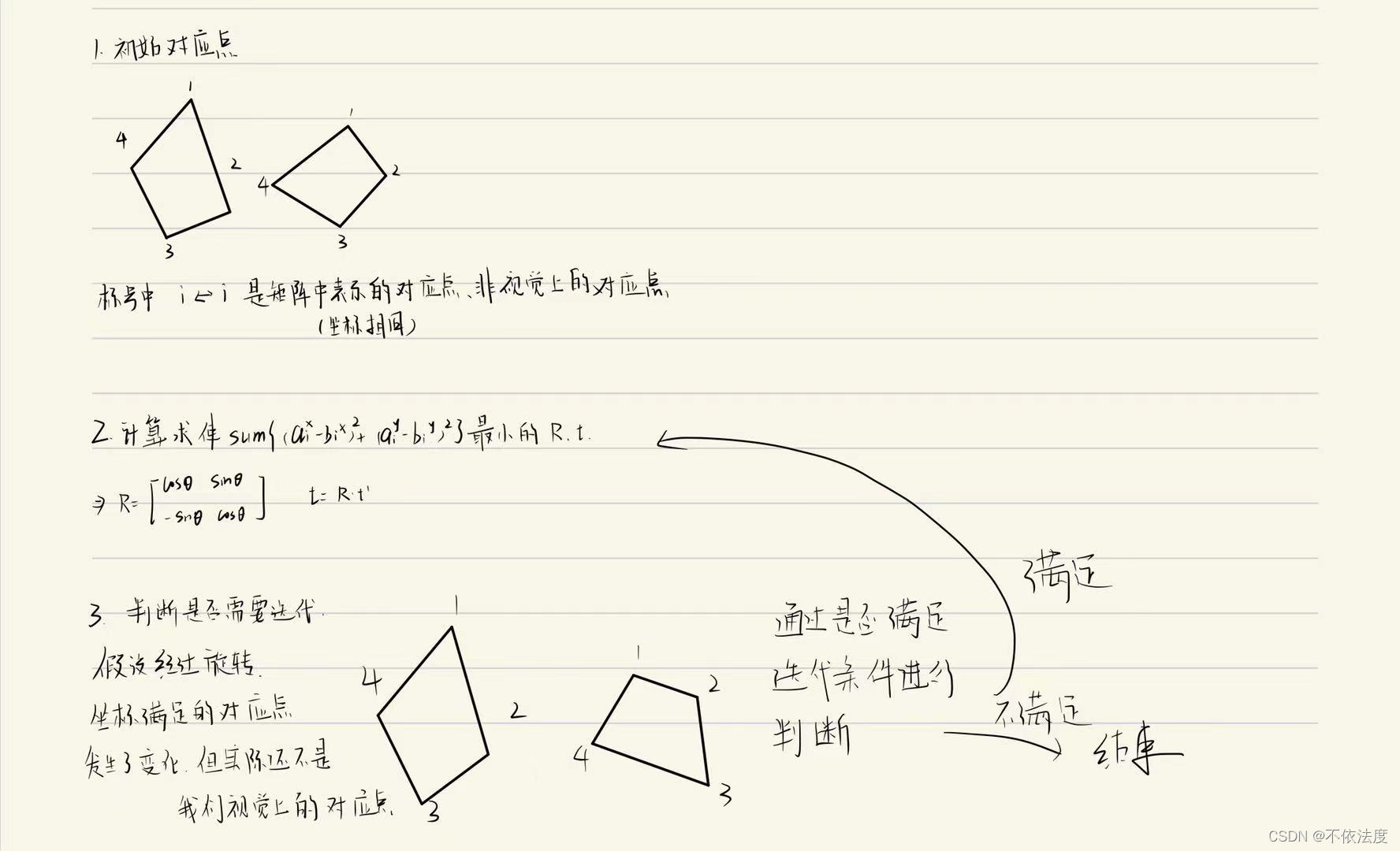
(我这图画的真丑…但是不碍事,能看就行)
ICP实现过程(匹配对应点)
输入
我们解析两张svg图片,得到svg图的所有关键点,为输入数据——两个点云(点集)。
初始化对应点

这里的ai和bj是视觉上(真正有意义)的对应点,需要迭代匹配才能得到。
{ai,bj}=arg min{sqrt( (aix-bjx)2 +(aiy-bjy)2 ) },这是视觉上的对应点的定义,取距离最短的两点作为对应点。
迭代求旋转矩阵中用到的ai,bi是点云归一化后的对应点,不一定是视觉上的对应点
平移之后通过旋转确定点的匹配。
比如这张图,此时的ai,bi只是因为矩阵坐标上一致所以被认为是对应点。
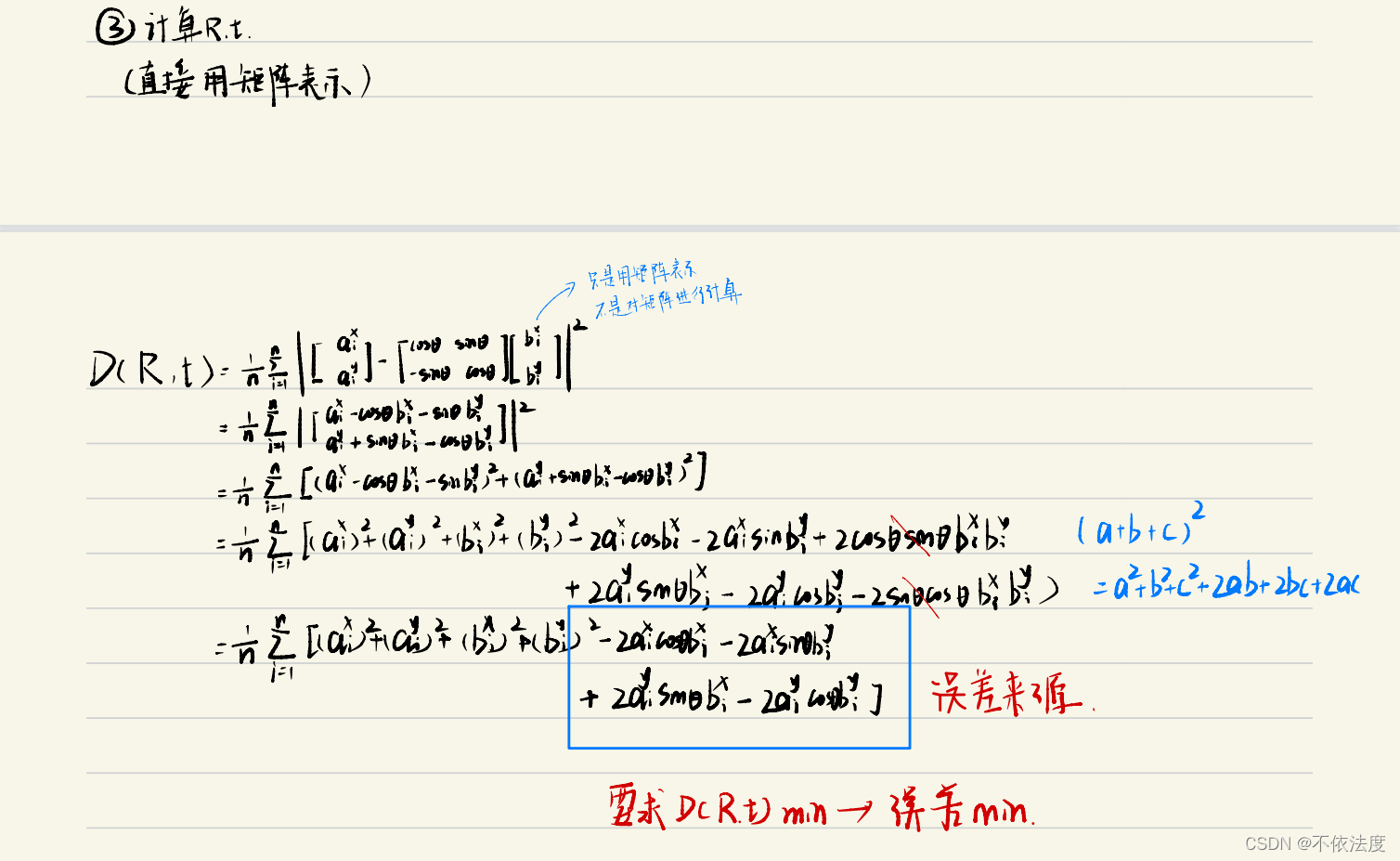
ICP算法最重要的就是找到对应的旋转和平移矩阵,使得变换后的两个点云近似匹配(对应点距离平方最小)
求旋转,平移矩阵
在对点云归一化的过程中,两个点云的重心已经重叠。已经实现部分的平移,所以我们接下来重心放在旋转上,得到旋转矩阵后就可以得到实际的平移矩阵 R*t’。

t’是点云归一化的矩阵——对于矩阵的每一个点-=点云重点。

关于迭代
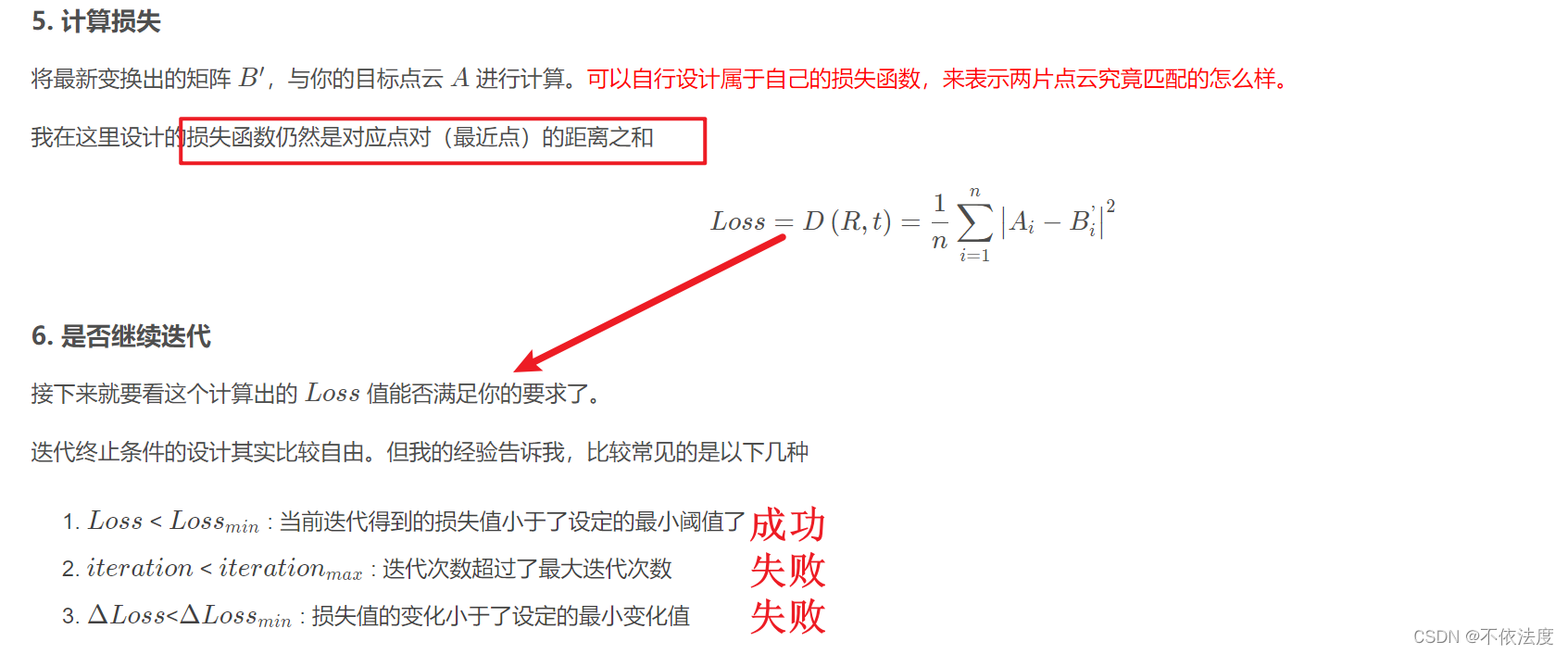
第三点匹配失败是因为变化不大,没有迭代的必要了。
如果没有达到迭代终止的三种情况就继续迭代。
ICP代码
代码借鉴:这篇博客是基于三维图像进行的ICP算法的实现,我稍微改了一些东西
Eigen库的导入和使用参考1
Eigen库的导入和使用参考2
这段代码只是第一次旋转平移,初次尝试匹配,并加上迭代的功能。
#include <Eigen/Dense>
#include <iostream>
#include <string.h>
#include <fstream>
#include <vector>
#include<cmath>
using namespace std;
struct Point
{
double x, y;
};
//功能:读取文件txt、asc->MatrixXd
void CreateCloudMatrix(const string& file_path, Eigen::MatrixXd& inPutPointCloud)
{
ifstream file;
file.open(file_path.c_str(), ios::in);
if (!file.is_open()) {
cout << "文件打开失败" << endl;
exit(0);
}
// ifstream file();//c_str():生成一个const char*指针,指向以空字符终止的数组。
string line;
Point point;
vector<Point> cloud;
while (getline(file, line)) //用到x,y,z
{
stringstream ss(line);
ss >> point.x;
ss >> point.y;
cloud.push_back(point);
}
Eigen::MatrixXd pointCloud = Eigen::MatrixXd::Zero(cloud.size(), 2);//size行,两列
for (int i = 0; i < cloud.size(); i++)
{
pointCloud(i, 0) = cloud[i].x;
pointCloud(i, 1) = cloud[i].y;
}
inPutPointCloud = pointCloud;
file.close();
}
//功能:SVD计算点集配准
//介绍:输入两个对应点云,输出旋转矩阵、平移矩阵。
void PointCloudRegistrationSVD(Eigen::MatrixXd &inputPointCloud1, Eigen::MatrixXd &inputPointCloud2, Eigen::Matrix2d& rotationMat, Eigen::Vector2d& translationMat)
{
// MatrixXd 表示的是动态数组,初始化的时候指定数组的行数和列数
//每列求均值->1X2
Eigen::RowVector2d meanVector1 = inputPointCloud1.colwise().mean();
Eigen::RowVector2d meanVector2 = inputPointCloud2.colwise().mean();
//平移后的矩阵
//减去质心坐标,每行坐标减去上面的那个1X2矩阵
inputPointCloud1.rowwise() -= meanVector1;
inputPointCloud2.rowwise() -= meanVector2;
cout << "平移后的:" << endl;
cout << "矩阵1:" << endl;
for (int i = 0; i < inputPointCloud1.size() / 2; i++) {
cout << inputPointCloud1(i, 0) << " " << inputPointCloud1(i, 1) << endl;
}
cout << endl;
cout << "矩阵2:" << endl;
for (int i = 0; i < inputPointCloud2.size() / 2; i++) {
cout << inputPointCloud2(i, 0) << " " << inputPointCloud2(i, 1) << endl;
}
cout << endl;
double sum1 = 0, sum2 = 0;
for (int i = 0; i < inputPointCloud1.size() / 2; i++) {
sum1 += inputPointCloud1(i, 0) * inputPointCloud2(i, 1) - inputPointCloud1(i, 1) * inputPointCloud2(i, 0);
sum2 += inputPointCloud1(i, 0) * inputPointCloud2(i, 0) + inputPointCloud1(i, 1) * inputPointCloud2(i, 1);
}
double Atan = atan(sum1 / sum2);
//点云1的所有坐标-=点云2的所有坐标*旋转矩阵(平移后的点云)
rotationMat(0, 0) = cos(Atan);
rotationMat(0, 1) = sin(Atan);
rotationMat(1, 0) = -sin(Atan);
rotationMat(1, 1) = cos(Atan);
translationMat = meanVector2 - meanVector1 * rotationMat;
}
void test()
{
Eigen::MatrixXd inPutPointCloud1;
Eigen::MatrixXd inPutPointCloud2;
Eigen::Matrix2d rotationMat;
//旋转矩阵
Eigen::Vector2d translationMat;
//平移矩阵
CreateCloudMatrix("C:\\Users\\mio\\Desktop\\data1.txt", inPutPointCloud1);
CreateCloudMatrix("C:\\Users\\mio\\Desktop\\data2.txt", inPutPointCloud2);
//初始化点云
PointCloudRegistrationSVD(inPutPointCloud1, inPutPointCloud2, rotationMat, translationMat);
cout << "旋转矩阵:" << endl;
cout << rotationMat(0, 0) << " , " << rotationMat(0, 1) << endl;
cout << rotationMat(1, 0) << " , " << rotationMat(1, 1) << endl;
cout << endl << "矩阵1经过旋转矩阵后的变化:" << endl;
for (int i = 0; i < inPutPointCloud1.size() / 2; i++) {
cout << inPutPointCloud1(i, 0) * rotationMat(0, 0) + inPutPointCloud1(i, 1) * rotationMat(1, 0) << " "
<< inPutPointCloud1(i, 0) * rotationMat(0, 1) + inPutPointCloud1(i, 1) * rotationMat(1, 1) << endl;
}
}
int main()
{
test();
}
对应点匹配成功后就可以确定两个svg图形是否满足相似性。
测试结果
点按同一个时针方向导入

手动演示一下匹配过程
1.初始的时候

数据给出来
data1:
5 -1
4 5
5 6
6 5
7 5
data2:
0 -4
-6 -5
-7 -4
-6 -3
-6 -2
2.重心归一:平移

3.旋转,匹配成功

尝试一下点随机分布
也匹配的上,但是没有同一时针输入准确
test 1
data1:
5 -1
7 5
4 5
5 6
6 5
data2:
0 -4
-6 -5
-7 -4
-6 -3
-6 -2

手动演示
直接看旋转之后的

test 2
data1:
5 -1
7 5
4 5
5 6
6 5
data2:
-6 -3
-6 -2
0 -4
-6 -5
-7 -4

是否满足相似性















 2255
2255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









