







目录
一,VAE
1.1 VAE的简介
变分自编码器(Variational Autoencoder,VAE) 是一种基于深度学习的生成模型,属于无监督学习算法,常用于数据生成、降维、特征学习等任务。它结合了变分推断和 ** 自动编码器(Autoencoder)** 的思想,能够学习数据的潜在概率分布,并生成与训练数据相似的新样本。
1.2 VAE的核心思想
传统的自动编码器(AE)由编码器(Encoder)和解码器(Decoder)组成,通过压缩输入数据到低维 “瓶颈”( latent space,潜在空间)再重建数据。但 AE 的潜在空间缺乏概率结构,无法直接用于生成新样本。VAE 的改进在于:假设潜在空间服从连续的概率分布(通常是正态分布)。通过变分推断(Variational Inference)近似真实数据的概率分布,使潜在空间具有连续性和可采样性,从而支持生成新样本。
1.3 VAE的结构
1. 编码器(Encoder):把数据 “压缩” 成特征向量
作用:输入一张图片(或其他数据),编码器会提取其中的关键特征,将其 “压缩” 成一个潜在向量(Latent Vector),这个向量代表了数据在 “特征空间” 中的位置。
特点:传统自动编码器(AE)的编码器直接输出一个确定的向量(如长度为 100 的特征向量),但 VAE 的编码器输出的是概率分布的参数(比如均值和方差)。
这意味着,编码器认为输入数据对应于潜在空间中的一个 “范围”(概率分布),而不是一个固定的点。例如,一张猫的图片可能对应于潜在空间中 “猫特征” 分布的某个区域。
2. 解码器(Decoder):从特征向量 “解压缩” 回数据
作用:输入潜在向量,解码器会根据这个向量 “还原” 出原始数据(如生成一张图片)。
特点:解码器的输入不是一个确定的向量,而是从编码器输出的概率分布中随机采样得到的向量。
这样,即使输入相似的潜在向量,解码器也可能生成略有不同的结果,增加了生成数据的多样性。
1.4 VAE的工作原理
首先通过编码器将输入数据映射到潜在空间的概率分布(通常假设为正态分布),得到分布的均值和方差,利用重参数化技巧从该分布中采样生成潜在向量,使采样过程可导以便反向传播优化;接着解码器将潜在向量还原为重建数据,力求与原始输入相似;训练时通过平衡重建损失(衡量重建数据与原始数据的差异)和 KL 散度损失(迫使潜在分布接近标准正态分布,确保潜在空间连续有序),使模型既能准确重建数据,又能让潜在空间的每个点对应有意义的语义特征;最终,模型可从规则化的潜在空间中随机采样或插值生成全新的、符合训练数据分布的样本,实现无监督的特征学习与数据生成。
1.5 VAE 与传统自动编码器(AE)的区别
| 对比项 | 自动编码器(AE) | 变分自动编码器(VAE) |
|---|---|---|
| 编码器输出 | 确定的特征向量(一个点) | 概率分布的参数(均值、方差) |
| 潜在空间 | 可能混乱,无法直接生成新数据 | 强制为规则分布(如正态分布),支持随机生成 |
| 核心能力 | 数据压缩与重建 | 数据生成与特征表示学习 |
1.6 VAE 的应用场景
| 应用场景 | 说明 |
|---|---|
| 数据生成 | 通过学习数据分布,生成新的类似样本(如图像、语音、文本),常用于生成模型(如人脸、动漫角色)。 |
| 数据压缩与降噪 | 将高维数据编码为低维隐向量(如 latent_dim=512),实现有损压缩;同时通过重构过程过滤噪声。 |
| 异常检测 | 对正常数据建模后,通过重构误差识别偏离分布的异常样本(如工业缺陷检测、医疗异常信号识别)。 |
| 半监督学习 | 利用无标签数据的隐向量分布辅助有标签数据训练,提升分类或回归任务性能。 |
| 图像编辑与插值 | 在隐空间中通过向量运算(如插值、加减特征向量)修改图像属性(如表情、姿态、风格)。 |
| 探索性数据分析 | 通过隐向量的可视化(如降维到 2D/3D)观察数据分布规律、聚类结构或潜在特征关联。 |
| 跨域转换 | 学习不同数据域(如素描→彩色图像、医学影像→自然图像)的隐空间映射,实现风格迁移或模态转换。 |
| 药物发现与设计 | 在化学分子的隐空间中搜索具有特定性质的分子结构,辅助新药研发(如生成候选化合物)。 |
二,代码逻辑分析
2.1 整体逻辑
- 训练 VAE:通过无监督学习学习 FashionMNIST 图像的潜在特征分布。
- 图像重建:验证 VAE 的生成能力,可视化原始图像与重建图像。
- 提取隐变量:使用训练好的 VAE 编码器将图像转换为隐向量。
- 训练分类器:在隐变量空间中训练非线性分类器,实现图像分类。
2.2 VAE模型
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
self.shortcut = nn.Sequential() if in_channels == out_channels else nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += self.shortcut(x)
return F.relu(out)
# VAE模型(修改latent_dim默认值为512)
class VAE(nn.Module):
def __init__(self, latent_dim=512): # 关键修改:默认值改为512
super(VAE, self).__init__()
self.encoder = nn.Sequential(
nn.Conv2d(1, 32, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(32),
ResidualBlock(32, 32),
nn.Conv2d(32, 64, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(64),
ResidualBlock(64, 64),
nn.Conv2d(64, 128, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(128),
ResidualBlock(128, 128),
nn.Conv2d(128, 256, 4, stride=1, padding=0), nn.ReLU(), nn.BatchNorm2d(256)
)
self.fc_mu = nn.Linear(256 * 1 * 1, latent_dim) # 输出维度跟随latent_dim
self.fc_logvar = nn.Linear(256 * 1 * 1, latent_dim) # 输出维度跟随latent_dim
self.decoder = nn.Sequential(
nn.Linear(latent_dim, 256 * 4 * 4), nn.ReLU(), nn.Unflatten(1, (256, 4, 4)),
nn.ConvTranspose2d(256, 128, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(128),
ResidualBlock(128, 128),
nn.ConvTranspose2d(128, 64, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(64),
ResidualBlock(64, 64),
nn.ConvTranspose2d(64, 32, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(32),
nn.Conv2d(32, 1, kernel_size=3, stride=1, padding=1), nn.Sigmoid()
)
def encode(self, x):
h = self.encoder(x).view(x.size(0), -1)
return self.fc_mu(h), self.fc_logvar(h)
def reparameterize(self, mu, logvar):
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return mu + eps * std
def decode(self, z):
return self.decoder(z)
def forward(self, x):
mu, logvar = self.encode(x)
z = self.reparameterize(mu, logvar)
return self.decode(z), mu, logvar
编码器结构通过多层卷积和残差块逐步将输入的 32×32 单通道图像压缩为隐变量空间的概率分布参数,具体流程为:首先使用卷积核为 4×4、步长 2 的卷积层将图像尺寸从 32×32 依次降维至 16×16、8×8、4×4,再通过最后一层卷积得到 1×1 的 256 通道特征图,期间每两层卷积后接入残差块以增强特征传递和缓解梯度消失,最后通过全连接层将展平后的 256 维特征向量映射为 512 维的均值 μ 和对数方差 logσ²,为后续重参数化采样提供分布参数。解码器则以对称的反卷积结构从隐变量重构图像,先通过全连接层将 512 维隐向量扩展为 4×4×256 的特征图,再利用反卷积核为 4×4、步长 2 的反卷积层依次将尺寸恢复至 8×8、16×16、32×32,同样在每两层反卷积后使用残差块保留细节,最后通过卷积层和 Sigmoid 激活函数生成单通道 32×32 图像,像素值范围控制在 [0,1]。编码器与解码器通过残差块增强特征表达能力,以重参数化技巧实现采样过程的可导性,并通过 KL 散度和交叉熵损失平衡隐变量分布的正则化与图像重建质量,形成从图像压缩到概率建模再到重建的完整流程,为后续基于隐变量的分类任务提供有效的特征表示。
2.3 训练策略与优化
# VAE损失函数 - 结合重构损失和KL散度
def vae_loss(recon_x, x, mu, logvar, beta=1.0):
# 重构损失:衡量重建图像与原始图像的差异
recon_loss = F.binary_cross_entropy(recon_x, x, reduction='mean') * 1024
# KL散度:衡量潜在分布与标准正态分布的差异
kld_loss = beta * (-0.5 * torch.mean(1 + logvar - mu.pow(2) - logvar.exp()))
return recon_loss + kld_loss, recon_loss, kld_loss重构损失(Reconstruction Loss):衡量模型生成的样本与原始输入样本的相似程度,确保编码和解码过程不会丢失过多信息。使用二分类交叉熵(BCE)并乘以 1024(32x32 图像的像素数),将像素级损失缩放至合理范围,避免因像素数多导致损失值过小难以优化。
KL 散度损失(KL Divergence Loss):保编码器输出的潜在变量分布尽可能接近预设的先验分布。这一步是 VAE 区别于普通自动编码器的核心,它使潜在空间具有连续性和语义连贯性,从而支持生成新样本。通过beta参数动态调整 KL 散度的权重,训练初期(前 5 个 epoch)逐步增加beta至 1.0(暖启动),避免早期因强制拟合正态分布导致的生成质量下降。
公式beta = min(1.0, (epoch + 1)/5.0)实现线性增长,平衡了重建质量与潜在分布的正则化。这种策略称为 "Annealed VAE",早期优先优化重建能力(低 β 值),后期强化隐空间正则化(高 β 值),平衡了特征保留与分布规则化。
2.4 自适应学习率调度
使用ReduceLROnPlateau根据验证损失动态调整学习率:
scheduler = ReduceLROnPlateau(optimizer, mode='min', factor=0.5, patience=3)
scheduler.step(avg_loss)当验证损失停滞时,自动将学习率降低 50%,避免模型陷入局部最优,提升训练稳定性。
2.5 图像重建
# 图像重建可视化函数
def reconstruct_images(model, test_loader, device, num_images=10):
model.eval()
with torch.no_grad():
# 获取一批测试图像
data, _ = next(iter(test_loader))
data = data[:num_images].to(device)
# 生成重建图像
recon, _, _ = model(data)
# 可视化原始图像和重建图像
plt.figure(figsize=(20, 4))
for i in range(num_images):
# 原始图像
plt.subplot(2, num_images, i + 1)
plt.imshow(data[i].cpu().squeeze(), cmap='gray')
plt.axis('off')
# 重建图像
plt.subplot(2, num_images, i + 1 + num_images)
plt.imshow(recon[i].cpu().squeeze(), cmap='gray')
plt.axis('off')
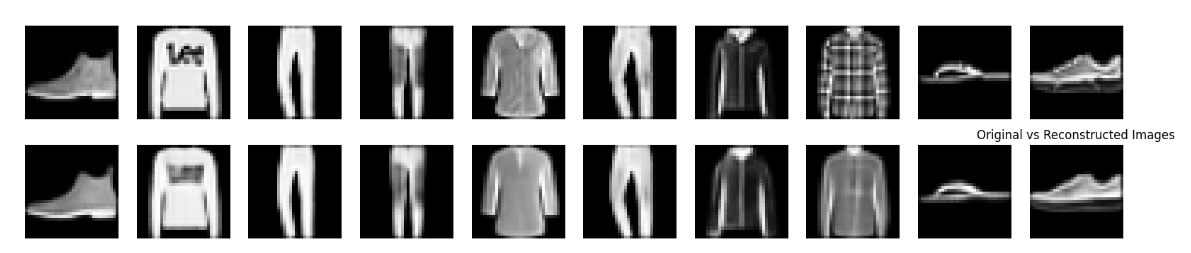
plt.title('Original vs Reconstructed Images')
plt.show()输入图像 → 编码器 → 隐变量(μ, logvar) → 重参数化采样 → 解码器 → 重建图像
2.6 特征提取
# 提取隐变量函数 - 从编码器获取潜在空间表示
def extract_latents(model, data_loader, device, use_mu=False):
model.eval()
latents, labels = [], []
with torch.no_grad():
for data, target in data_loader:
data = data.to(device)
mu, logvar = model.encode(data)
# 使用均值或采样的潜在变量
z = model.reparameterize(mu, logvar) if not use_mu else mu
latents.append(z.cpu())
labels.append(target)
return torch.cat(latents, dim=0), torch.cat(labels, dim=0)输入图像 → 编码器 → 隐变量(μ 或采样的 z) → 保存隐变量(不经过解码器)
三,测试结果
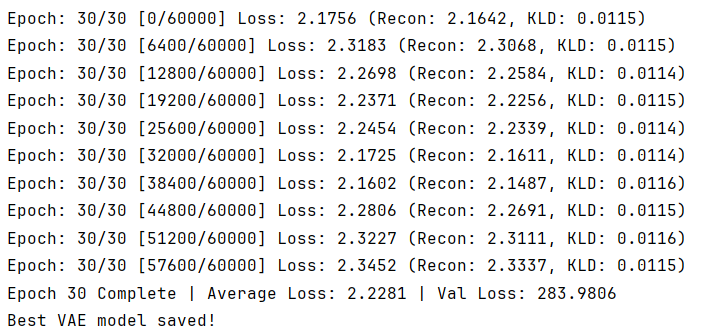
3.1 VAE在自监督学习结果
3.2 VAE重建图像
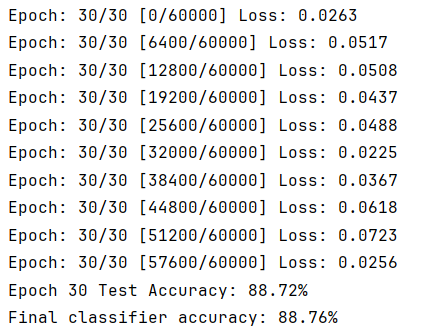
3.3 VAE对于分类任务的准确度
3.4 总结
VAE(变分自动编码器)相比传统自动编码器(AE)的核心优势在于其概率建模能力:AE 将输入编码为确定性隐向量,隐空间结构无序,仅能实现数据重建;而 VAE 通过将输入映射为概率分布(均值与方差),结合重参数化技巧生成隐向量,不仅通过 KL 散度约束隐空间接近标准正态分布、提升泛化能力,还赋予隐空间语义连续性(如向量插值对应平滑语义过渡),支持随机生成新样本且质量更优。此外,VAE 的概率特征在分类等下游任务中表现更具鲁棒性,KL 散度的正则化作用也有效控制了过拟合,使其在生成、特征学习等场景中更具优势。
四,完整代码
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import numpy as np
import matplotlib.pyplot as plt
from torch.optim.lr_scheduler import ReduceLROnPlateau
# 设置随机种子确保实验可复现
torch.manual_seed(42)
np.random.seed(42)
torch.backends.cudnn.deterministic = True
# 残差块结构 - 帮助构建更深的神经网络
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels):
super(ResidualBlock, self).__init__()
# 第一个卷积层+批量归一化
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
# 第二个卷积层+批量归一化
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
# 快捷连接:处理输入输出通道数不一致的情况
self.shortcut = nn.Sequential() if in_channels == out_channels else nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
# 前向传播路径:卷积 -> 归一化 -> ReLU -> 卷积 -> 归一化 -> 残差连接 -> ReLU
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += self.shortcut(x) # 残差连接,解决深层网络梯度消失问题
return F.relu(out)
# VAE模型 - 变分自动编码器
class VAE(nn.Module):
def __init__(self, latent_dim=512): # 关键修改:潜在空间维度默认设为512
super(VAE, self).__init__()
# 编码器网络 - 将输入图像映射到潜在空间
self.encoder = nn.Sequential(
# 四层卷积+残差块,逐步降低空间维度,增加通道数
nn.Conv2d(1, 32, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(32),
ResidualBlock(32, 32),
nn.Conv2d(32, 64, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(64),
ResidualBlock(64, 64),
nn.Conv2d(64, 128, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(128),
ResidualBlock(128, 128),
nn.Conv2d(128, 256, 4, stride=1, padding=0), nn.ReLU(), nn.BatchNorm2d(256)
)
# 全连接层计算潜在空间的均值和对数方差
self.fc_mu = nn.Linear(256 * 1 * 1, latent_dim)
self.fc_logvar = nn.Linear(256 * 1 * 1, latent_dim)
# 解码器网络 - 从潜在空间重构图像
self.decoder = nn.Sequential(
# 线性层+反卷积层,逐步恢复空间维度,减少通道数
nn.Linear(latent_dim, 256 * 4 * 4), nn.ReLU(), nn.Unflatten(1, (256, 4, 4)),
nn.ConvTranspose2d(256, 128, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(128),
ResidualBlock(128, 128),
nn.ConvTranspose2d(128, 64, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(64),
ResidualBlock(64, 64),
nn.ConvTranspose2d(64, 32, 4, stride=2, padding=1), nn.ReLU(), nn.BatchNorm2d(32),
nn.Conv2d(32, 1, kernel_size=3, stride=1, padding=1), nn.Sigmoid() # 输出范围0-1
)
def encode(self, x):
# 编码过程:将输入图像转换为潜在空间的均值和对数方差
h = self.encoder(x).view(x.size(0), -1)
return self.fc_mu(h), self.fc_logvar(h)
def reparameterize(self, mu, logvar):
# 重参数化技巧:从潜在分布中采样,允许反向传播
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return mu + eps * std
def decode(self, z):
# 解码过程:从潜在向量重构图像
return self.decoder(z)
def forward(self, x):
# 完整前向传播:编码 -> 重参数化 -> 解码
mu, logvar = self.encode(x)
z = self.reparameterize(mu, logvar)
return self.decode(z), mu, logvar
# VAE损失函数 - 结合重构损失和KL散度
def vae_loss(recon_x, x, mu, logvar, beta=1.0):
# 重构损失:衡量重建图像与原始图像的差异
recon_loss = F.binary_cross_entropy(recon_x, x, reduction='mean') * 1024
# KL散度:衡量潜在分布与标准正态分布的差异
kld_loss = beta * (-0.5 * torch.mean(1 + logvar - mu.pow(2) - logvar.exp()))
return recon_loss + kld_loss, recon_loss, kld_loss
# 数据加载函数 - 准备FashionMNIST数据集
def load_data():
transform = transforms.Compose([
transforms.Resize((32, 32)), # 调整图像大小为32x32
transforms.ToTensor() # 转换为张量
])
train_dataset = datasets.FashionMNIST('./data', train=True, download=True, transform=transform)
test_dataset = datasets.FashionMNIST('./data', train=False, transform=transform)
return (DataLoader(train_dataset, batch_size=128, shuffle=True, num_workers=4, pin_memory=True),
DataLoader(test_dataset, batch_size=128, shuffle=False, num_workers=4, pin_memory=True))
# 训练VAE模型的函数
def train_vae(model, train_loader, test_loader, optimizer, scheduler, epochs=50, device='cuda'):
best_loss = float('inf')
for epoch in range(epochs):
model.train()
total_loss, total_recon, total_kld = 0, 0, 0
beta = min(1.0, (epoch + 1) / 5.0) # 逐步增加KL散度权重
for batch_idx, (data, _) in enumerate(train_loader):
data = data.to(device)
optimizer.zero_grad()
# 前向传播和损失计算
recon, mu, logvar = model(data)
loss, recon_loss, kld_loss = vae_loss(recon, data, mu, logvar, beta)
# 反向传播和优化
loss.backward()
optimizer.step()
# 记录损失
total_loss += loss.item()
total_recon += recon_loss.item()
total_kld += kld_loss.item()
# 打印训练进度
if batch_idx % 50 == 0:
print(f'Epoch: {epoch + 1}/{epochs} [{batch_idx * len(data)}/{len(train_loader.dataset)}] '
f'Loss: {loss.item() / len(data):.4f} (Recon: {recon_loss.item() / len(data):.4f}, '
f'KLD: {kld_loss.item() / len(data):.4f})')
# 每个epoch后调整学习率
avg_loss = total_loss / len(train_loader.dataset)
scheduler.step(avg_loss)
# 验证模型
model.eval()
with torch.no_grad():
recon, mu, logvar = model(next(iter(test_loader))[0].to(device))
val_loss, _, _ = vae_loss(recon, next(iter(test_loader))[0].to(device), mu, logvar, beta)
print(f'Epoch {epoch + 1} Complete | Average Loss: {avg_loss:.4f} | Val Loss: {val_loss.item():.4f}')
# 保存最佳模型
if val_loss < best_loss:
best_loss = val_loss
torch.save(model.state_dict(), 'best_vae.pth')
print('Best VAE model saved!')
# 图像重建可视化函数
def reconstruct_images(model, test_loader, device, num_images=10):
model.eval()
with torch.no_grad():
# 获取一批测试图像
data, _ = next(iter(test_loader))
data = data[:num_images].to(device)
# 生成重建图像
recon, _, _ = model(data)
# 可视化原始图像和重建图像
plt.figure(figsize=(20, 4))
for i in range(num_images):
# 原始图像
plt.subplot(2, num_images, i + 1)
plt.imshow(data[i].cpu().squeeze(), cmap='gray')
plt.axis('off')
# 重建图像
plt.subplot(2, num_images, i + 1 + num_images)
plt.imshow(recon[i].cpu().squeeze(), cmap='gray')
plt.axis('off')
plt.title('Original vs Reconstructed Images')
plt.show()
# 提取隐变量函数 - 从编码器获取潜在空间表示
def extract_latents(model, data_loader, device, use_mu=False):
model.eval()
latents, labels = [], []
with torch.no_grad():
for data, target in data_loader:
data = data.to(device)
mu, logvar = model.encode(data)
# 使用均值或采样的潜在变量
z = model.reparameterize(mu, logvar) if not use_mu else mu
latents.append(z.cpu())
labels.append(target)
return torch.cat(latents, dim=0), torch.cat(labels, dim=0)
# 非线性分类器 - 用于评估潜在空间质量
class NonLinearClassifier(nn.Module):
def __init__(self, input_dim, num_classes=10):
super().__init__()
# 两层神经网络带批归一化和Dropout
self.layers = nn.Sequential(
nn.Linear(input_dim, 256),
nn.ReLU(),
nn.BatchNorm1d(256),
nn.Dropout(0.3), # 防止过拟合
nn.Linear(256, num_classes)
)
def forward(self, x):
return self.layers(x)
# 训练分类器函数 - 评估VAE学习到的特征表示
def train_classifier(train_latents, train_labels, test_latents, test_labels, input_dim, num_classes, epochs=50,
lr=5e-4):
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
classifier = NonLinearClassifier(input_dim, num_classes).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(classifier.parameters(), lr=lr, weight_decay=1e-5)
scheduler = ReduceLROnPlateau(optimizer, mode='max', factor=0.5, patience=2, verbose=True)
# 创建数据加载器
train_dataset = torch.utils.data.TensorDataset(train_latents, train_labels)
train_loader = DataLoader(train_dataset, batch_size=128, shuffle=True)
test_dataset = torch.utils.data.TensorDataset(test_latents, test_labels)
test_loader = DataLoader(test_dataset, batch_size=128, shuffle=False)
best_acc = 0.0
for epoch in range(epochs):
# 训练阶段
classifier.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = classifier(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
if batch_idx % 50 == 0:
print(
f'Epoch: {epoch + 1}/{epochs} [{batch_idx * len(data)}/{len(train_loader.dataset)}] Loss: {loss.item():.4f}')
# 测试阶段
classifier.eval()
correct, total = 0, 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device)
output = classifier(data)
_, pred = torch.max(output.data, 1)
total += target.size(0)
correct += (pred == target).sum().item()
acc = 100.0 * correct / total
scheduler.step(acc) # 根据准确率调整学习率
print(f'Epoch {epoch + 1} Test Accuracy: {acc:.2f}%')
# 保存最佳模型
if acc > best_acc:
best_acc = acc
torch.save(classifier.state_dict(), 'best_classifier.pth')
print('Best classifier saved!')
return best_acc
# 主函数 - 程序入口点
def main():
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"Using device: {device}")
# 加载数据
train_loader, test_loader = load_data()
# 创建并训练VAE模型
vae = VAE(latent_dim=512).to(device) # 关键修改:使用512维潜在空间
optimizer = optim.Adam(list(vae.encoder.parameters()) + list(vae.decoder.parameters()), lr=1e-3)
scheduler = ReduceLROnPlateau(optimizer, mode='min', factor=0.5, patience=3)
print("Training VAE...")
train_vae(vae, train_loader, test_loader, optimizer, scheduler, epochs=30, device=device)
vae.load_state_dict(torch.load('best_vae.pth')) # 加载最佳模型
# 可视化重建结果
print("Reconstructing images...")
reconstruct_images(vae, test_loader, device)
# 提取潜在空间表示
print("Extracting latents...")
train_latents, train_labels = extract_latents(vae, train_loader, device, use_mu=False)
test_latents, test_labels = extract_latents(vae, test_loader, device, use_mu=False)
# 训练分类器评估潜在空间质量
print("Training classifier...")
classifier_acc = train_classifier(
train_latents, train_labels,
test_latents, test_labels,
input_dim=512, # 与VAE的latent_dim一致
num_classes=10,
epochs=30
)
print(f"Final classifier accuracy: {classifier_acc:.2f}%")
if __name__ == "__main__":
main()

















 1891
1891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











