







代码是官方的代码,备注是自己加的,后续会改进
实验效果:
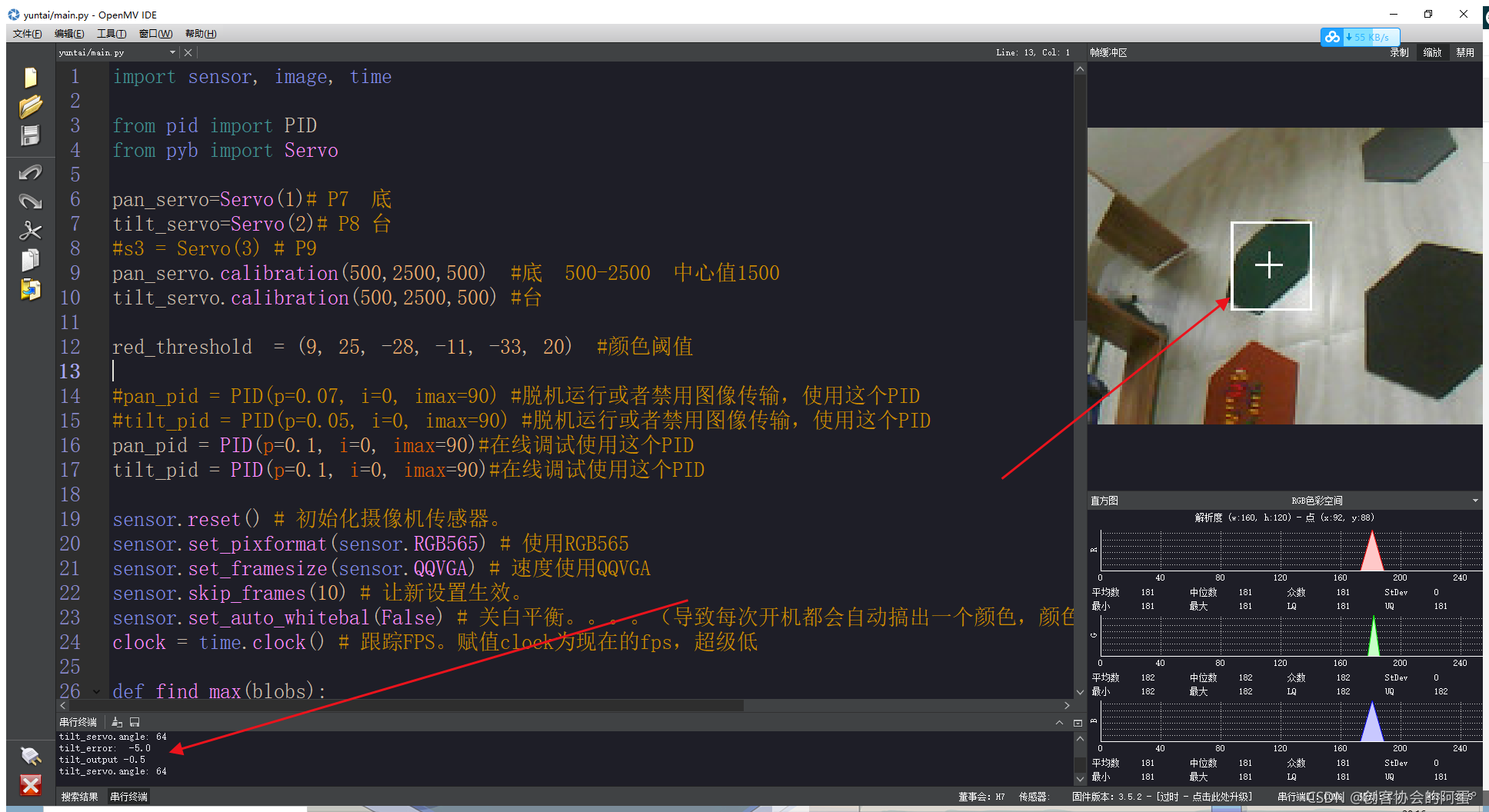
main.py:
import sensor, image, time
from pid import PID
from pyb import Servo
pan_servo=Servo(1)# P7 底
tilt_servo=Servo(2)# P8 台
#s3 = Servo(3) # P9
pan_servo.calibration(500,2500,500) #底 500-2500 中心值1500
tilt_servo.calibration(500,2500,500) #台
red_threshold = (9, 25, -28, -11, -33, 20) #颜色阈值
#pan_pid = PID(p=0.07, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID
#tilt_pid = PID(p=0.05, i=0, imax=90) #脱机运行或者禁用图像传输,使用这个PID
pan_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID
tilt_pid = PID(p=0.1, i=0, imax=90)#在线调试使用这个PID
sensor.reset() # 初始化摄像机传感器。
sensor.set_pixformat(sensor.RGB565) # 使用RGB565
sensor.set_framesize(sensor.QQVGA) # 速度使用QQVGA
sensor.skip_frames(10) # 让新设置生效。
sensor.set_auto_whitebal(False) # 关白平衡。。。。(导致每次开机都会自动搞出一个颜色,颜色识别会有问题)
clock = time.clock() # 跟踪FPS。赋值clock为现在的fps,超级低
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
while(True):
clock.tick() #跟踪快照之间经过的毫秒数().
img = sensor.snapshot() # 拍一张照片,然后返回图像。
blobs = img.find_blobs([red_threshold]) #赋值blobs为找到红色像素的值
if blobs:
max_blob = find_max(blobs) #找最大的色块
#print("cx: ", max_blob.cx()) #打印X的的位置
#print("cy: ", max_blob.cy()) #打印Y的的位置
pan_error = max_blob.cx()-img.width()/2 #底的误差为最大色块所在的X轴-宽(宽固定=160 /2=80)我理解为取XY中心点
tilt_error = max_blob.cy()-img.height()/2 #台的误差为最大色块所在的Y轴-高(120)
# print("pan_error: ", pan_error) #打印底的偏差
print("tilt_error: ", tilt_error) #打印台的偏差
'比如说现在X的距离是159 目标中心偏差159-img.width()/2=79'
img.draw_rectangle(max_blob.rect()) # 矩形
img.draw_cross(max_blob.cx(), max_blob.cy()) # cx, cy 交叉
pan_output=pan_pid.get_pid(pan_error,1)/2 #底的转动=获取的PID值 get_pid(self, error, scaler)/2
tilt_output=tilt_pid.get_pid(tilt_error,1) #台的转动=获取的PID值 get_pid(self, error, scaler) 也可以除以2 走慢一点罢了
'可以这样子理解,这个pid的函数是想使偏差=0'
# print("pan_output",pan_output)
print("tilt_output",tilt_output)
pan_servo.angle(pan_servo.angle()+pan_output) #底部舵机转动的角度为上一个角度+现在的输出(偏差)角度
tilt_servo.angle(tilt_servo.angle()-tilt_output) #上面舵机转动的角度为上一个角度-现在的输出(偏差)角度 因为是倒转 所以是减
print("tilt_servo.angle:",tilt_servo.angle())
官方PID算法:
pid.py
from pyb import millis
from math import pi, isnan
class PID:
_kp = _ki = _kd = _integrator = _imax = 0
_last_error = _last_derivative = _last_t = 0
_RC = 1/(2 * pi * 20)
def __init__(self, p=0, i=0, d=0, imax=0):
self._kp = float(p)
self._ki = float(i)
self._kd = float(d)
self._imax = abs(imax)
self._last_derivative = float('nan')
def get_pid(self, error, scaler):
tnow = millis()
dt = tnow - self._last_t
output = 0
if self._last_t == 0 or dt > 1000:
dt = 0
self.reset_I()
self._last_t = tnow
delta_time = float(dt) / float(1000)
output += error * self._kp
if abs(self._kd) > 0 and dt > 0:
if isnan(self._last_derivative):
derivative = 0
self._last_derivative = 0
else:
derivative = (error - self._last_error) / delta_time
derivative = self._last_derivative + \
((delta_time / (self._RC + delta_time)) * \
(derivative - self._last_derivative))
self._last_error = error
self._last_derivative = derivative
output += self._kd * derivative
output *= scaler
if abs(self._ki) > 0 and dt > 0:
self._integrator += (error * self._ki) * scaler * delta_time
if self._integrator < -self._imax: self._integrator = -self._imax
elif self._integrator > self._imax: self._integrator = self._imax
output += self._integrator
return output
def reset_I(self):
self._integrator = 0
self._last_derivative = float('nan')















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











