






目录
0. 论文基本信息
1. Paper:IEEE Xplore Full-Text PDF:
2. Code:暂无
3. [引用] Wang, Cong, et al. "Using conditional generative adversarial 3-D convolutional neural network for precise radar extrapolation." IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 14 (2021): 5735-5749.
4. 摘要—雷达回波外推是气象服务中的基本但必不可少的任务。它可以以高时空分辨率的方式提供雷达回波预测结果,而且在计算效率上能够有效增强气象灾害的运营系统预测能力。传统方法通过估计相邻雷达数据之间的回波运动来进行外推。这种策略难以有效表征复杂的非线性气象过程,并且难以从大量历史数据中受益。最近,机器学习(ML)模型已经用于雷达回波外推。这些方法以数据驱动的方式和从统计角度有效地提高了外推质量。尽管基于ML的方法表现出色,但它们通常会产生模糊的外推结果。这导致了对雷达回波强度的低估,使回波缺乏小尺度细节。此外,这也使得模型难以预测严重的对流性危险。为了解决这个问题,提出了一种基于三维卷积神经网络和条件生成对抗网络的两阶段外推模型。这两个模型构成了“预外推”和“后处理”的范式。预外推模型以传统方式进行训练,执行粗略的外推。后处理模型使用预外推结果作为输入,并采用对抗策略进行训练。它可以校正回波强度并增加回波的细节。在实验中,我们的模型可以提供比其他方法更精确的雷达回波外推,特别是对于强回波和对流系统,在2015年至2016年的中国北部数据中。
5. 关键词—条件生成对抗网络(CGAN)、对流系统、卷积神经网络(CNN)、雷达外推。
6. JCR 1区(2021)
1. 背景介绍
天气雷达是气象观测的重要工具之一。它能够实时提供高精度的大气信息,也是许多天气识别和预测算法的基础。雷达回波外推技术是指基于过去的雷达数据预测未来雷达回波的变化。这项技术分析了过去几分钟内的雷达回波变化,并在接收数据后的几分钟内提供高时空分辨率的未来大气演变信息。外推技术在接下来的几个小时内,尤其是第一小时内具有可靠的预测技能。高质量的雷达回波外推结果是许多预测算法的基石,对于灾害防控具有重要意义。
传统的雷达外推方法可以分为基于单元的方法和像素级方法。基于单元的方法将风暴单元作为对象,通过跟踪其质心来计算每个单元的运动矢量。而像素级方法试图获得密集的运动矢量场,并逐点执行外推。然而,这些传统方法通常将回波强度在外推过程中视为恒定值,但实际的回波往往伴随着增强和减弱。此外,它们只使用当前的雷达序列进行外推,无法充分利用大量的历史样本。
近年来,机器学习(ML)方法已广泛应用于气象领域,并取得了显著的成果。ML方法可以通过建模大量历史数据,有效地从统计角度表示复杂的非线性气象过程。因此,一系列基于ML的雷达回波预测方法已被提出。然而,几乎所有基于ML的雷达外推方法都采用均方误差(MSE)及其扩展作为损失函数,这导致了外推结果的模糊化。
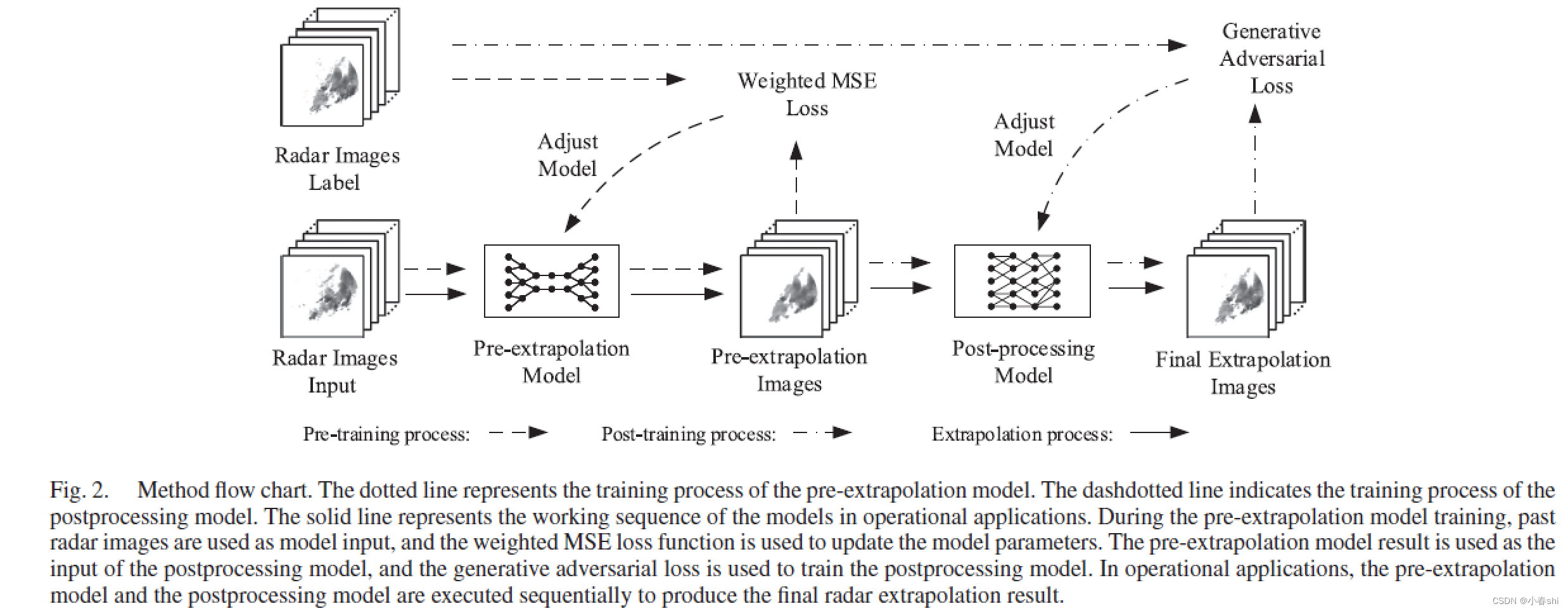
为解决这一问题,本文提出了一个基于三维卷积神经网络(3-D-CNN)和条件生成对抗网络(CGAN)的两阶段模型,以应对模糊化问题。与传统的GAN不同,CGAN在生成器的输入和输出之间额外增加了明确的约束。然而,本文没有将CGAN用于执行所有的雷达外推任务,因为雷达数据是高维时空数据,使用高维数据进行训练仍然是一项挑战。因此,首先训练一个基于3-D-CNN的“预外推”模型,使用增强的MSE作为损失函数。然后,将预外推模型的输出用作训练CGAN的“后处理”模型的输入。从ML的角度来看,预外推模型可以看作是后处理模型的预训练模型,使得CGAN-based后处理更容易收敛。从操作应用的角度来看,雷达外推问题被拆分成两个部分。预外推模型负责精确预测回波位置,粗略外推回波强度和分布。后处理模型负责微调强度和细节,生成最终逼真的外推结果。
这篇文章的结构如下。第II节展示了本文使用的数据。第III节描述了本文提出的方法。不同应用的结果和案例研究在第IV节中展示。第V节是讨论。总结和未来工作在第VI节中进行。
2. 数据设置
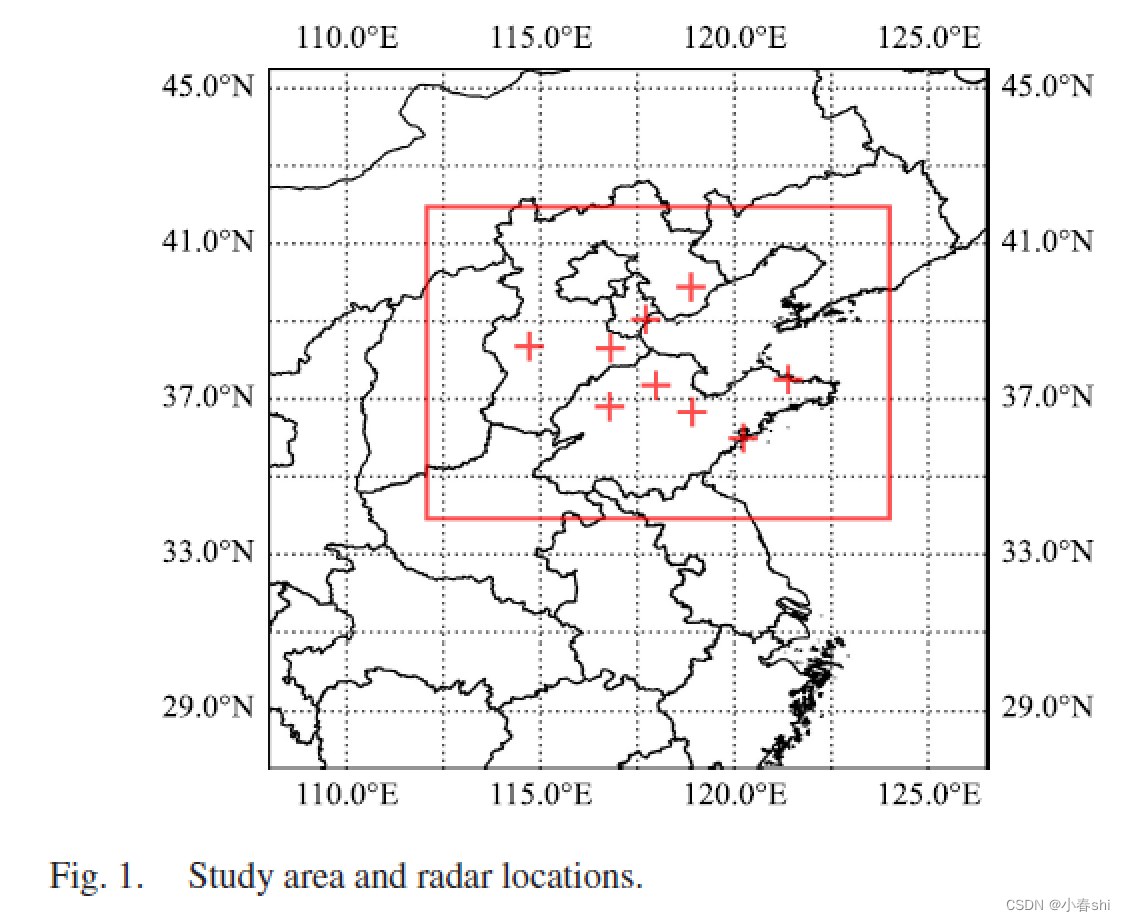
本研究使用中国气象局气象观测中心提供的S波段多普勒气象雷达数据进行雷达回波外推。这些雷达位于中国北方的秦皇岛、天津、石家庄、沧州、滨州、济南、潍坊、青岛和烟台等地。研究区域和雷达位置的概览如图1所示。时间范围从2015年5月到2016年12月。雷达每隔大约6分钟进行一次扫描,扫描范围为230公里。每次扫描包括从0.5°到19.5°的九个仰角。雷达数据从极坐标转换为分辨率为2公里×2公里的笛卡尔坐标。天气雷达的复合反射率图像产品用于回波外推。每20个连续的雷达扫描被视为一个完整的样本。前10个雷达图像用作模型的输入,用于预测未来约一小时内的接下来的10个雷达图像。最后的10个雷达图像用作标签,用于评估模型的性能。样本之间没有时间重叠。共收集了17,672个样本。根据日期,这些样本被划分为训练集、验证集和测试集,以确保数据集之间的独立性。每个月20号之前的样本被用作训练集,用于训练雷达外推模型。每个月21号到25号之间的雷达数据被视为模型调优的验证集。每个月26号之后的样本形成测试集,用于评估最终性能。训练集、验证集和测试集分别包含10,900、3,497和3,275个样本。
3. 方法论
在本文中,所提出的方法包括两个部分:
1. 基于3-D-CNN的雷达回波预外推模型。
2. 基于CGAN的雷达回波后处理模型。第一部分负责对未来雷达回波位置的外推,以及对未来回波强度和分布的粗略预测。第二部分负责对第一部分的结果进行后处理,以使最终结果更接近真实雷达回波的形状、细节和强度。方法的流程图如图2所示。
A. 基于三维卷积神经网络(3-D-CNN)的预外推模型
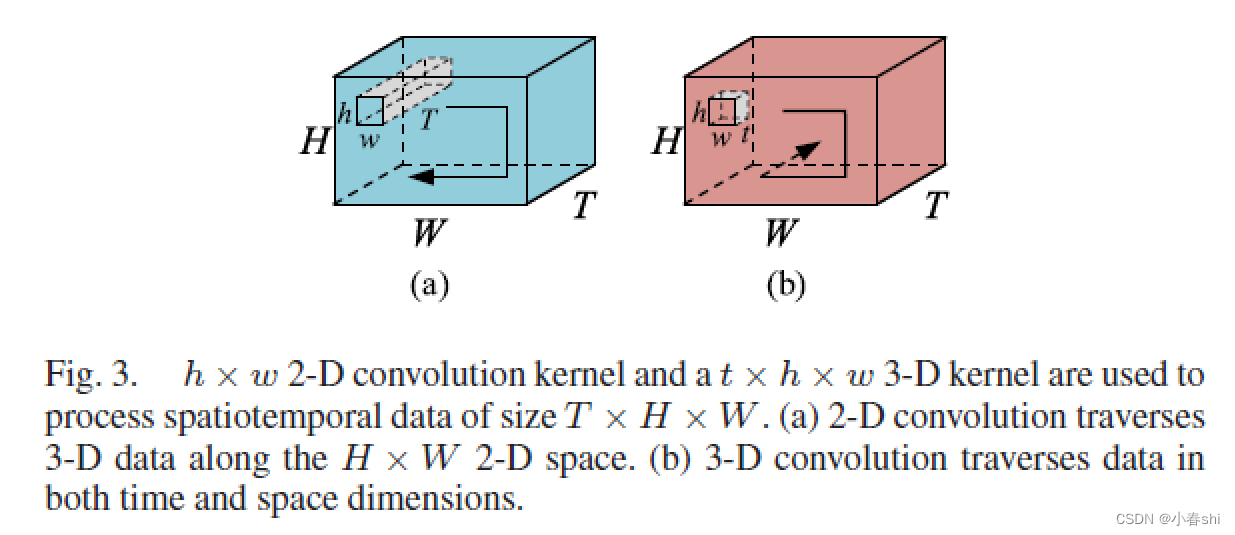
1. 三维卷积核:近年来,CNN在图像处理方面取得了显著进展,这要归功于CNN的结构符合图像数据的特点。图像数据通常表示为一个大小为H×W的2-D矩阵(H表示图像高度,W表示图像宽度)。相应地,传统的2-D卷积核也在这个2-D空间中执行特征提取。与普通的图像处理问题相比,雷达回波外推可以被看作是在空间维度中添加时间相关性。对于时空数据,通常表示为T×H×W的3-D网格(T表示时间维度)。如果直接使用2-D卷积来处理时空数据,特征提取只能在H×W的2-D空间中进行,而时间维度被视为图像通道的数量,不会进行任何额外的处理[见图3(a)]。为了增强模型在时间维度提取特征的能力,可以通过在时间维度上扩展2-D卷积核来获得3-D卷积核[60],[61]。3-D卷积核同等重视时间维度和空间维度,并在T×H×W的3-D空间中执行特征提取[见图3(b)]。在本文中,3-D卷积核被用作从雷达数据中提取时空特征的基本单元。
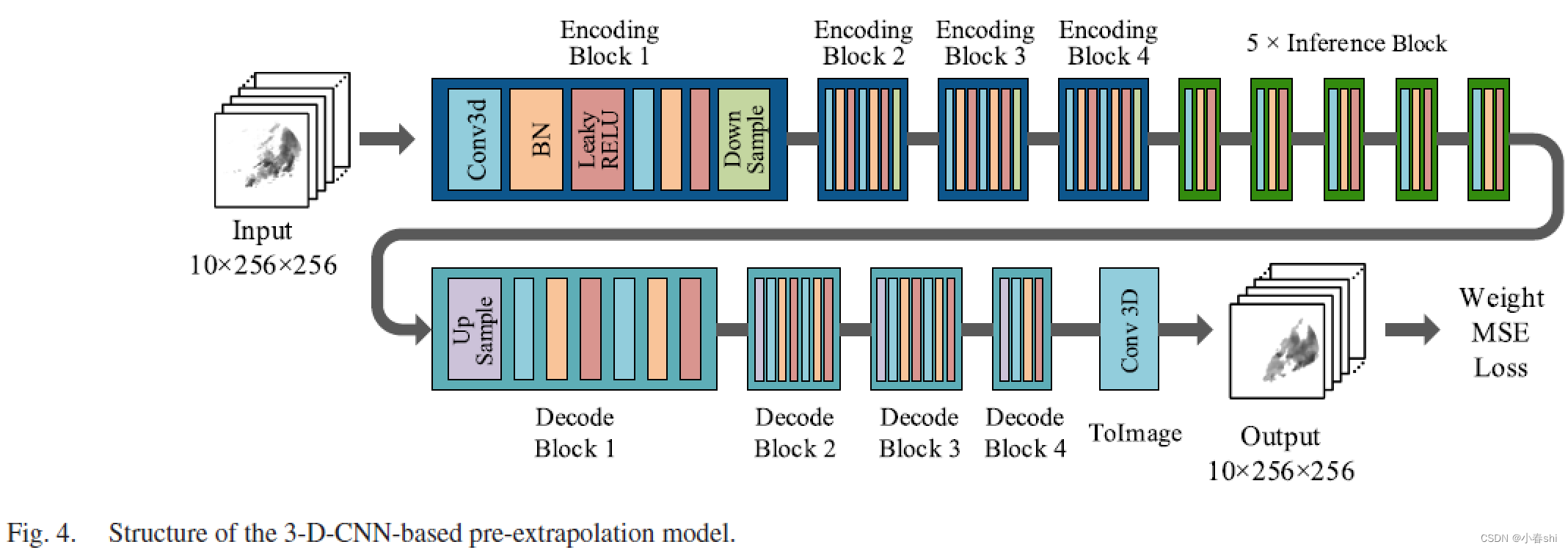
2. 模型结构和细节:该模型由一系列3-D卷积核组成,用于初步外推。模型结构如图4所示。该模型由三种类型的块组成:编码、推理和解码。编码块负责将高时空分辨率的雷达数据编码成低维空间。在这个过程中,它不仅获得了更强大的特征,还减少了计算资源的使用。推理块负责从编码的低维特征中进一步提取高级特征,并执行时空预测。在这个过程中,特征的维度保持一致。解码块用于将低维特征重构到原始雷达空间。共有四个编码块,每个编码块由两个3-D卷积核和一个额外的3-D下采样层组成。每次数据经过编码块时,空间分辨率减半,通道数翻倍。在最后一个编码块之后,时间分辨率也进行了下采样。接下来有五个推理模块,每个模块由一个不包含任何采样层的3-D卷积核组成。解码模块的数量与编码模块的数量相同。每个解码模块由两个3-D卷积核和一个额外的3-D上采样层组成。每次数据通过解码模块时,空间分辨率都会恢复2倍。第一个解码模块还负责恢复时间分辨率。最后的解码模块由一个上采样层和一个3-D卷积核组成。在模型的最后,使用普通的3-D卷积核将解码模型的输出转换成图像空间。具体的模型参数见附录表A1。
此外,还使用了一些有价值的技术来构建模型。每个卷积核之后都使用批量归一化(BN)[62]。它可以在每个卷积核之后自适应地归一化数据,并保持原始分布,有效加速模型的收敛速度。每个卷积层之后还使用了带有斜率为0.2的LeakyRELU[63],以增强模型的非线性建模能力。最后一层仅用于转换通道数,不使用BN和LeakyRELU。
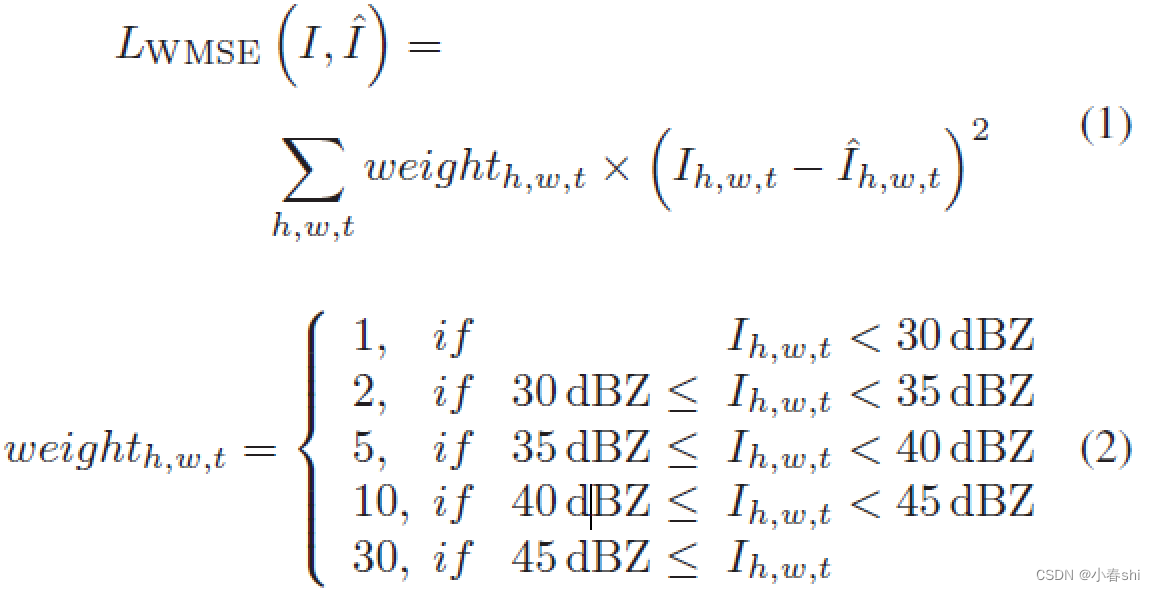
3. 损失函数:因为它只需要粗略估计雷达回波的强度和分布,所以在训练预外推模型时使用了MSE。在雷达数据中,更高的反射率通常意味着更严重的天气灾害。然而,高反射率的数据占所有雷达数据的一小部分[37]。这意味着模型将重点关注对弱反射率区域的预测准确性。为了缓解这个问题,使用了一种加权均方误差(WMSE)损失函数来优化预外推模型(1)-(2)。较高的反射率被赋予较高的权重,使模型能够更关注容易发生严重气象灾害的区域。
B. 基于CGAN的后处理模型
预外推模型可以粗略预测未来的雷达回波位置和强度分布,但缺乏局部形状细节,并且在强度方面仍然存在偏差。这妨碍了准确的预测,尤其是对于通常引发严重危害的云团系统。在本节中,设计了一个基于CGAN的后处理模型,以提高预外推模型结果的准确性。
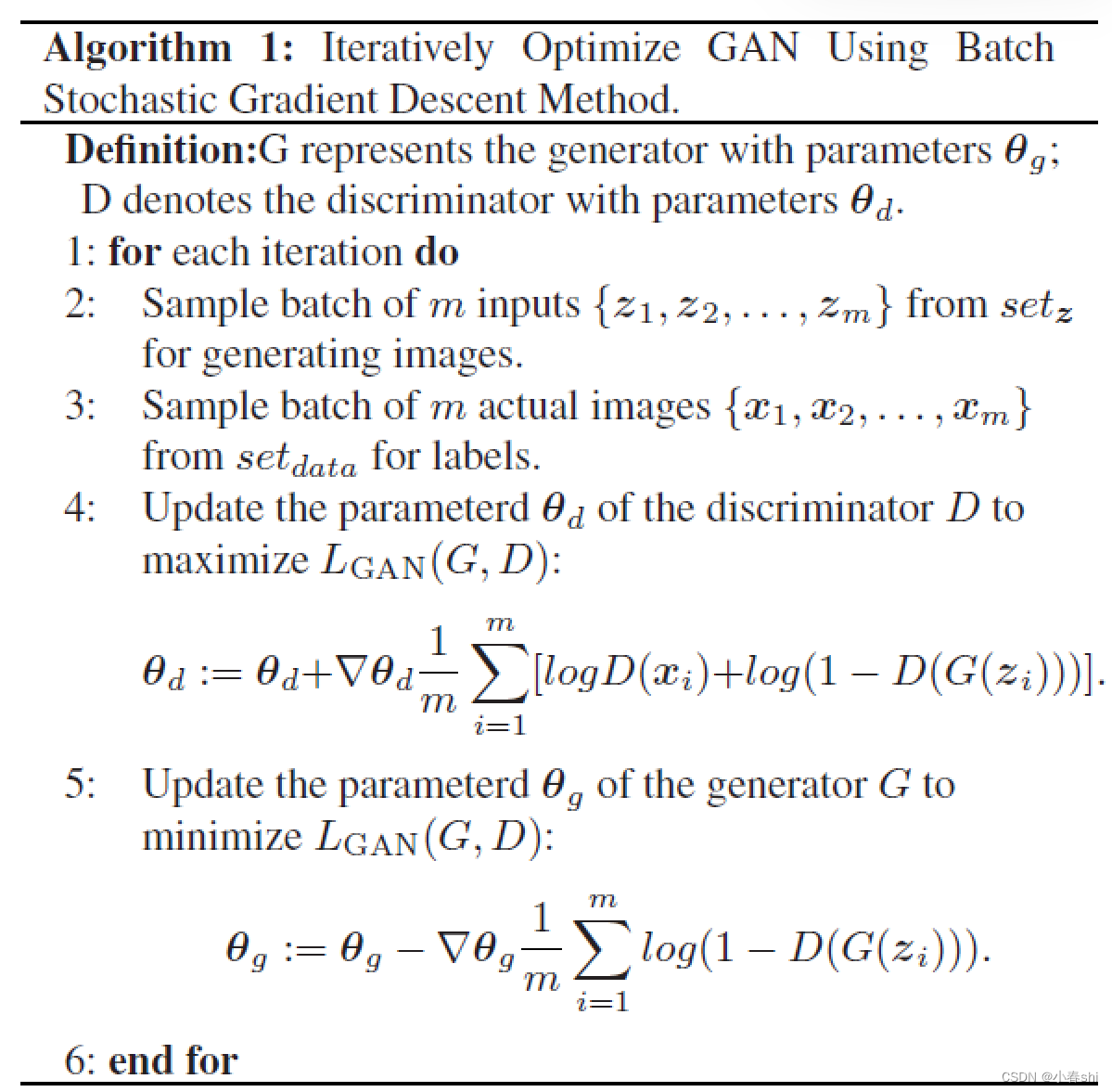
1. CGAN方法:GAN是由Goodfellow等人提出的一种从给定数据生成逼真图像的算法[46]。它减少了传统算法中基于像素的损失函数引起的“模糊”效应。GAN将传统的“模型-损失”范式转化为“生成器-判别器”范式。生成器使用给定数据生成虚假图像。但它不是像传统方法那样逐像素比较生成的图像和标签图像以计算损失。相反,生成的图像和标签图像被输入到一个称为“判别器”的新模型中,判别器用于确定输入的真实性。GAN的训练过程可以看作是生成器和判别器之间的对抗博弈。生成器的目标是使判别器无法区分由生成器生成的图像和标签图像的真实性。判别器的任务是从标签图像中识别出生成器的输出。这两个模型根据建立的目标进行迭代训练。最终,可以获得一个能够生成逼真图像的生成器和一个能够判断图像真实性的判别器。GAN打破了传统图像生成模型中损失函数的限制,它使用判别器来监督和改进生成模型,以取代特定的损失函数。因为CNN能够有效提取图像的高级特征,所以判别器通常由CNN组成。对于判别器来说,需要处理的只是一个图像分类问题。GAN的训练过程可以被定义为一个分类损失的交替最大化和最小化优化过程。损失函数定义如下:

其中,G和D分别表示生成器和判别器,E表示数学期望,x \sim set_{data}x∼setdata 表示从数据集中采样的x,x表示真实图像,set_{data}setdata 是标签图像的集合,z表示用于生成图像的给定信息,set_{z}setz 是z的集合。通常,生成器和判别器由神经网络组成,并使用批处理随机梯度下降算法来更新模型。迭代优化步骤如算法1所示。
原始的GAN用于从噪声生成逼真图像。生成器的输入和输出之间没有明确的约束。然而,在应用中,通常希望生成器能够根据特定的输入完成任务(例如,输入是低分辨率图像,输出是相应的高分辨率图像),这更受欢迎。为了解决这个问题,提出了CGAN[50]。与GAN不同,CGAN的判别器检查生成的图像是否与生成器输入相匹配,而不仅仅是判断生成器输出的真实性。因此,生成器的输入和输出一起作为判别器的输入。CGAN的损失函数如下:

其中,c表示生成图像的条件,set_{c}setc 是c的集合,其他符号与(3)中的相同。优化过程也发生了变化(见附录图A1)。
在本文中,CGAN用于增强预外推模型的结果。生成器以预外推模型的结果作为输入,并生成具有更多细节的雷达图像。判别器用于判断生成器的输入和输出是否匹配。预外推模型的结果和真实雷达图像被合并用作判别器的正样本,判别器的预期输出是“True”或“1”。判别器的负样本是预外推的雷达图像和生成的雷达图像,预期输出是“False”或“0”。生成器和判别器被迭代优化。最终,可以获得一个后处理模型,它能够根据预外推模型的结果输出准确的雷达图像。
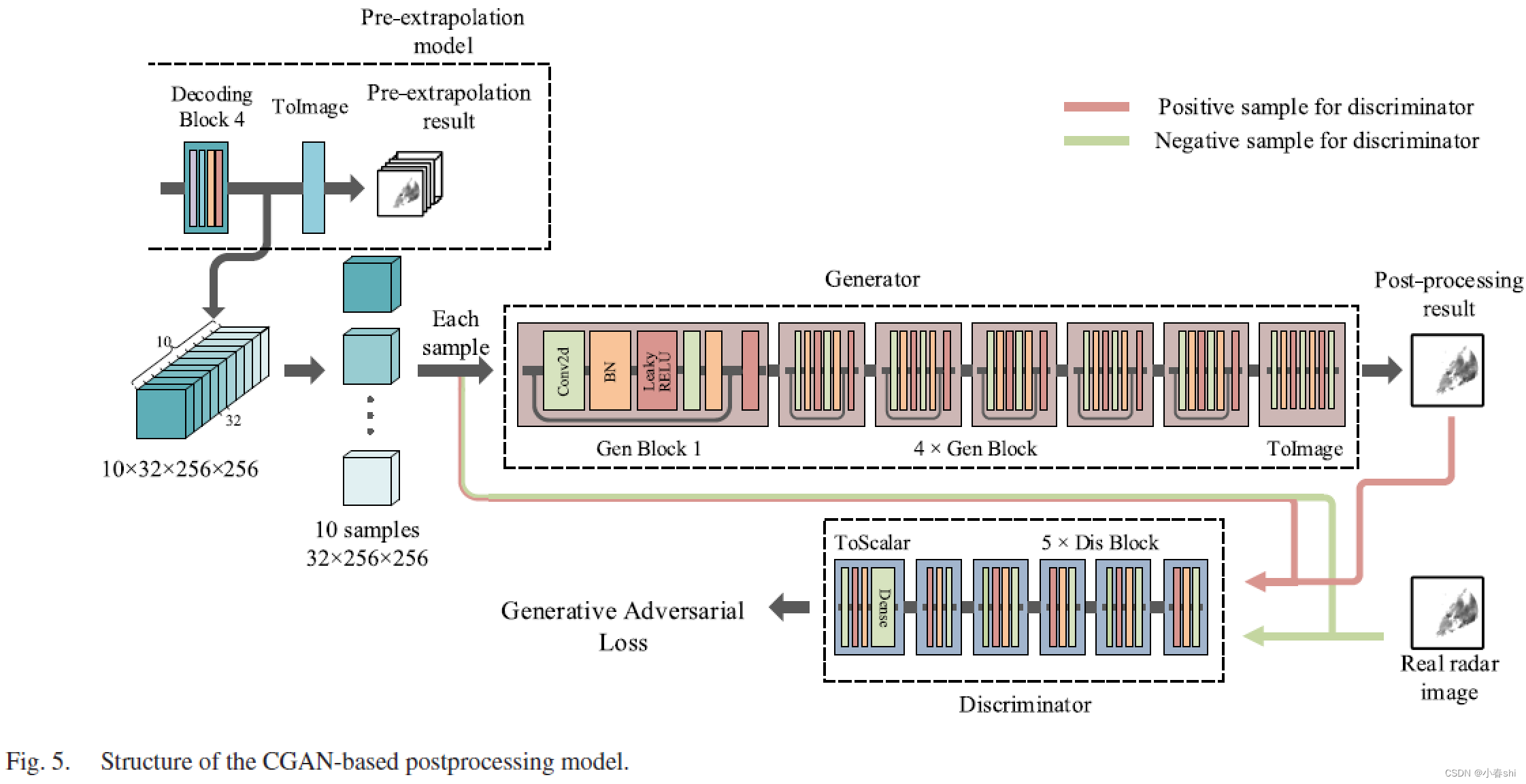
2. 模型结构和细节:后处理模型的结构如图5所示。预外推模型的结果逐个发送给生成器,以生成更精确的雷达图像。然而,生成器的输入不是预外推模型生成的雷达图像,而是预外推模型中最后一个解码块的特征图。这是因为最后一个解码块之后的输出包含比雷达图像更多的潜在信息。这样,生成器的每个样本都是一个带有32个通道的256×256图像。生成器由14层2-D卷积核组成。前12层中的每2层与BN和LeakyRELU一起形成一个生成器块,其中不包括任何采样操作。为了增强生成器性能,还引入了残差概念[64]。生成器的输入和输出连接成判别器的负样本,生成器的输入和标签图像成对,作为判别器的正样本。正负样本的分辨率都是33×256×256。判别器由五层2-D卷积层和两个全连接层组成。每两个判别器块后进行降采样。最后的全连接层给出了一个标量输出,用作判别器输入的得分。生成器和判别器的参数如附录表A2所示。
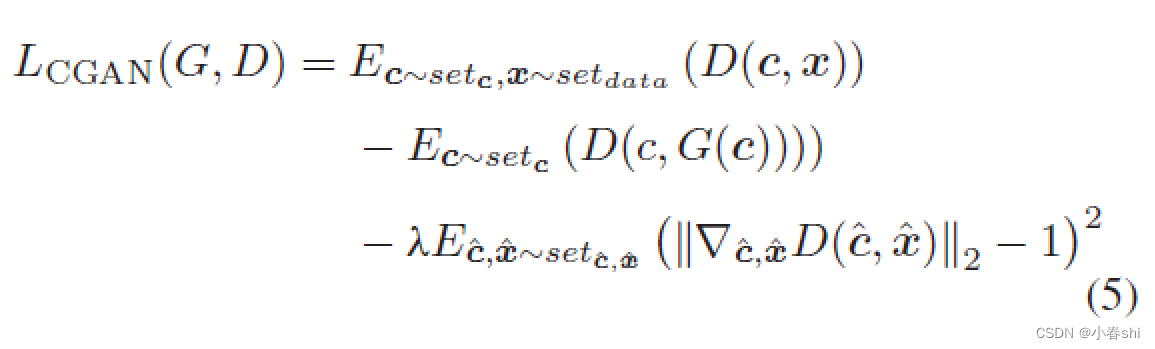
3. 损失函数:式(4)展示了CGAN的原始损失函数。然而,使用基本损失函数训练CGAN仍然具有挑战性,改进损失函数也是ML研究的热点之一。在本文中,为了训练CGAN模型,使用基于Wasserstein距离[65],[66]的损失函数(5)。基于这种损失函数的判别器不再估计样本的正负(输出在0和1之间),而是判断输入属于正样本还是负样本的程度(输出范围为无穷大)。此外,判别器还要求具有Lipschitz连续性,因此损失函数中添加了基于Lipschitz连续性的惩罚项。集\hat{c}, \hat{x}c^,x^ 表示一个集合,该集合由标签和生成图像之间的点组成。
4.实验
在这一部分,对模型性能进行了评估。使用基于像素和基于对流云团的评估来说明模型在不同气象应用中的性能。基线模型使用了基于多项式的Farneback光流方法[67]、TrajGRU[37]以及简单的3-D-CNN。我们的外推GAN模型被称为ExtGAN。Farneback光流使用本地多项式匹配进行密集运动矢量场估计,而[21]中提出的前向时间方案用作相应的外推方法。TrajGRU是一种有效的方法,它将门控循环单元(GRU)和2-D-CNN结合起来进行雷达外推。简单的3-D-CNN用于说明CGAN模型的作用。此外,为了说明WMSE的作用,还训练了一个没有WMSE的3-D-CNN模型,并与3-D-CNN进行比较。所有模型都使用训练集进行训练,使用验证集进行模型超参数调整,使用测试集来评估模型的最终性能。
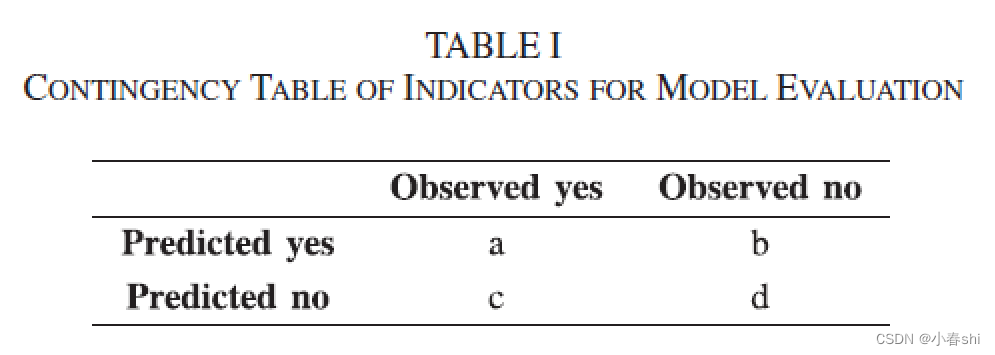
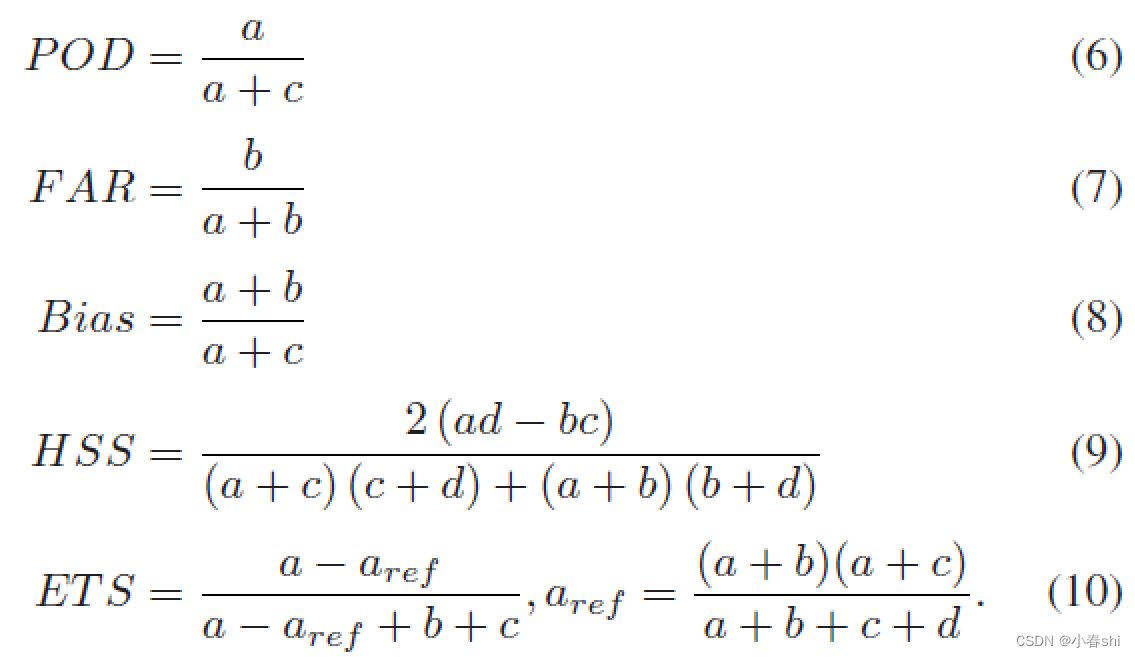
1. 评估指标:在实验中,使用基于列联表的方法来评估像素级别的模型。该方法设置不同的反射率阈值,这可以表示模型在不同危险级别下的性能。当设置阈值时,预测雷达图像上的每个点都会被转化为“预测是”或“预测否”,标签图像上的每个点都会被转化为“观察是”或“观察否”。如表I所示,a、b、c和d表示不同类型结果的数量。基于这些结果,计算了五个指标(6)-(10)。检测概率(POD)表示有多少危害被正确预测。虚警比率(FAR)表示未发生的预测危害的比例。公平威胁分数(ETS)通过对失误和虚警进行惩罚,并调整与随机机会相关的命中来更全面地评估命中。偏差指示模型是否过度预测或低估。Heidke技能评分(HSS)表示模型结果相对于随机预测的改进。
对流系统通常会导致严重的天气危害。对流云团是对流系统的基本单元,也是对流危害研究和预测的基本对象。为了展示外推方法对对流系统的预测能力,使用基于对流云团强度的两个统计指标来评估模型性能。标签雷达图像和外推结果中每个对流云团的最大反射率(MR)和平均反射率(AR)分别单独计数。前者可以显示模型对每个对流云团中最严重危害的预测能力。后者可以显示外推模型估计对流云团平均强度的准确性。此外,还计算了包含在外推结果中的对流云团数量,以评估模型用于对流危害预测的性能。在实验中,为了防止不同的细胞识别方法引起的干扰,对流云团被定义为面积大于20平方千米且反射率大于40 dBZ的区域。
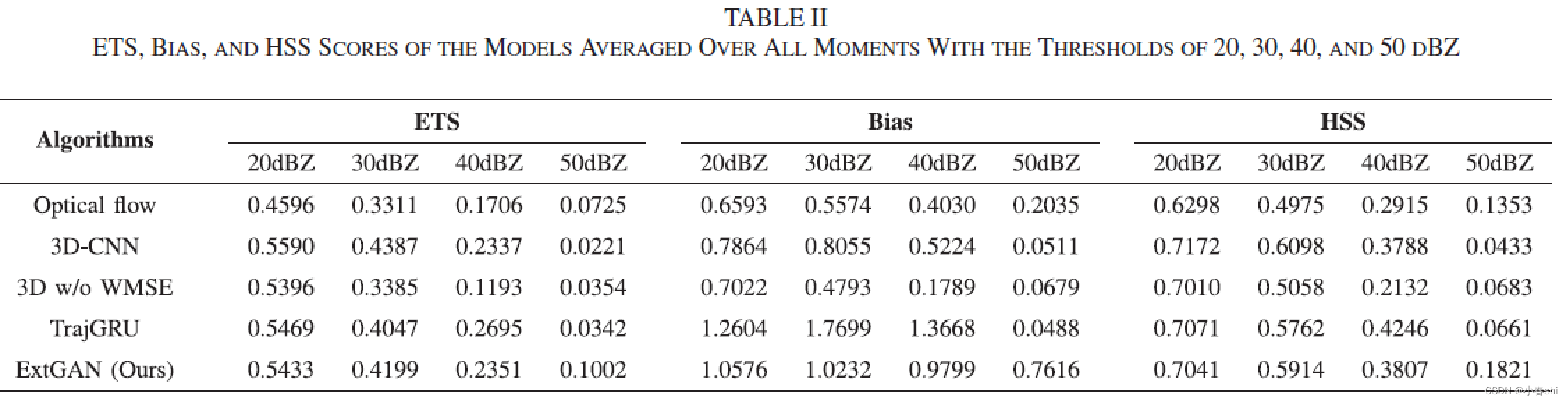
2. 像素级结果:首先进行像素级别的评估方法。表II显示了在不同反射率阈值下,模型在测试集上所有时刻的ETS、偏差和HSS得分的平均值。对于基线模型和ExtGAN,ETS和HSS直接反映了模型的性能。光流模型在低反射率阈值下始终得分最低,但在50 dBZ时表现更好。相反,机器学习模型在低反射率阈值下表现更好,但在50 dBZ时有不同的表现。在较低的反射率阈值下,ExtGAN的性能与其他模型相似。随着反射率阈值的增加,这些模型的性能恶化,但ExtGAN的下降速度最慢。当阈值达到50 dBZ时,我们的模型表现出明显的优势。50 dBZ通常表示严重的危害。ExtGAN仍然具有可接受的预测能力(ETS为0.1002,HSS为0.1821),但其他机器学习模型表现不佳(ETS和HSS都在10的负2次方数量级)。偏差得分显示模型对危害规模预测的能力。当反射率阈值在20 dBZ和40 dBZ之间时,光流和3-D-CNN的偏差得分小于1,倾向于低估危害;TrajGRU的偏差得分大于1,倾向于高估;ExtGAN的得分约为1,意味着危害预测的规模接近实际规模。当反射率阈值为50 dBZ时,ExtGAN的偏差得分为0.7616,其他机器学习模型的得分约为10的负2次方数量级。这些模型的偏差得分趋势也不同。光流和3-D-CNN w/o WMSE的偏差得分随着阈值的增加而减小。然而,其他机器学习模型的偏差得分都是先增加后减小。此外,没有WMSE的3-D-CNN仅在20 dBZ阈值下与3-D-CNN的性能相似(见表II)。在30 dBZ和40 dBZ时,3-D-CNN w/o WMSE的性能远远不及3-D-CNN。这表明WMSE可以提高模型对强回波的预测能力。
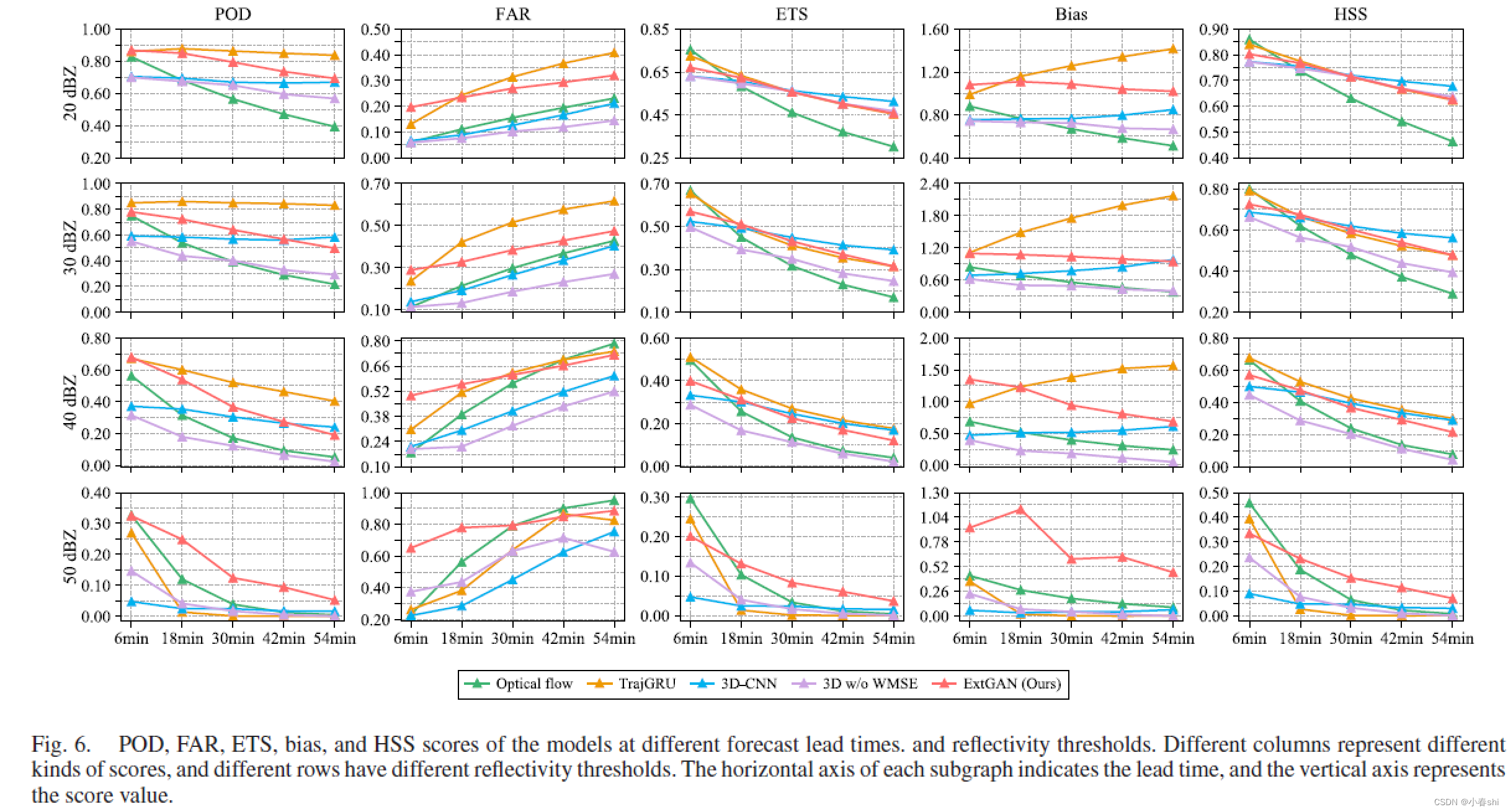
更完整的像素级别评估结果在图6中显示。所有分数之间的数量关系与表II中的一致。ETS、POD和HSS具有类似的趋势,随时间而减小。光流模型在前几个预测时刻始终表现出色,但随着时间的推移,性能急剧下降。TrajGRU模型的趋势与光流相似。3-D-CNN和ExtGAN更稳定。对于FAR分数,所有模型随着时间的推移而增加,但我们模型的变化更稳定。光流和ExtGAN的偏差分数随时间增加而降低。相反,其他模型的偏差分数随着时间的推移逐渐增加。
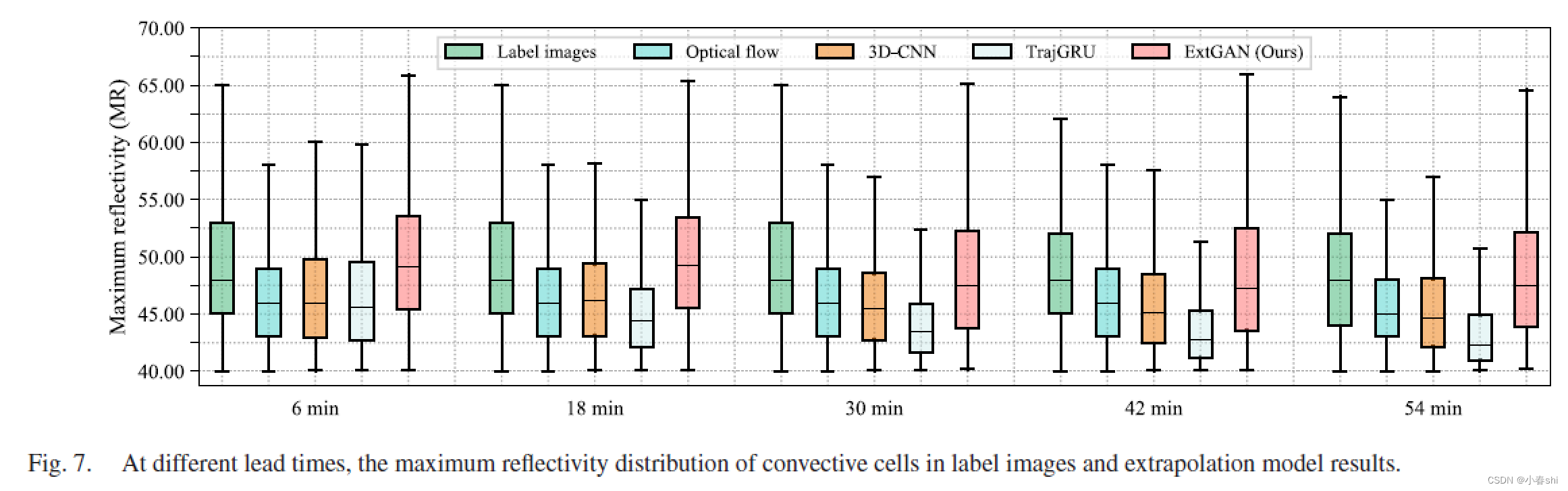
3. 基于对流云团的结果:进行了两个基于对流云团的评估指标。表III显示了不同模型在所有测试样本上的MR和AR统计数据。对于MR统计数据,标签雷达图像高于所有外推模型。ExtGAN报告了所有比较模型中最高的MR。此外,ExtGAN的统计数据最接近标签雷达图像。在基线模型中,3-D-CNN最接近标签雷达图像。不同时刻的所有模型的MR在图7中显示。同样,对于每个时刻,标签雷达图像的统计数据高于所有外推模型,而我们的MR最接近标签。标签的MR随时间几乎不变。所有外推模型的MR与标签雷达图像之间的差距随时间增加。
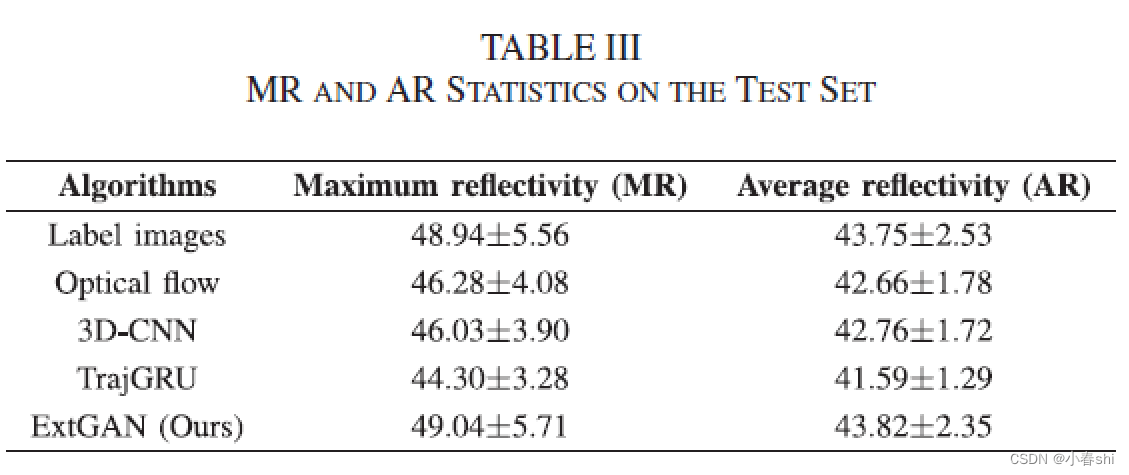
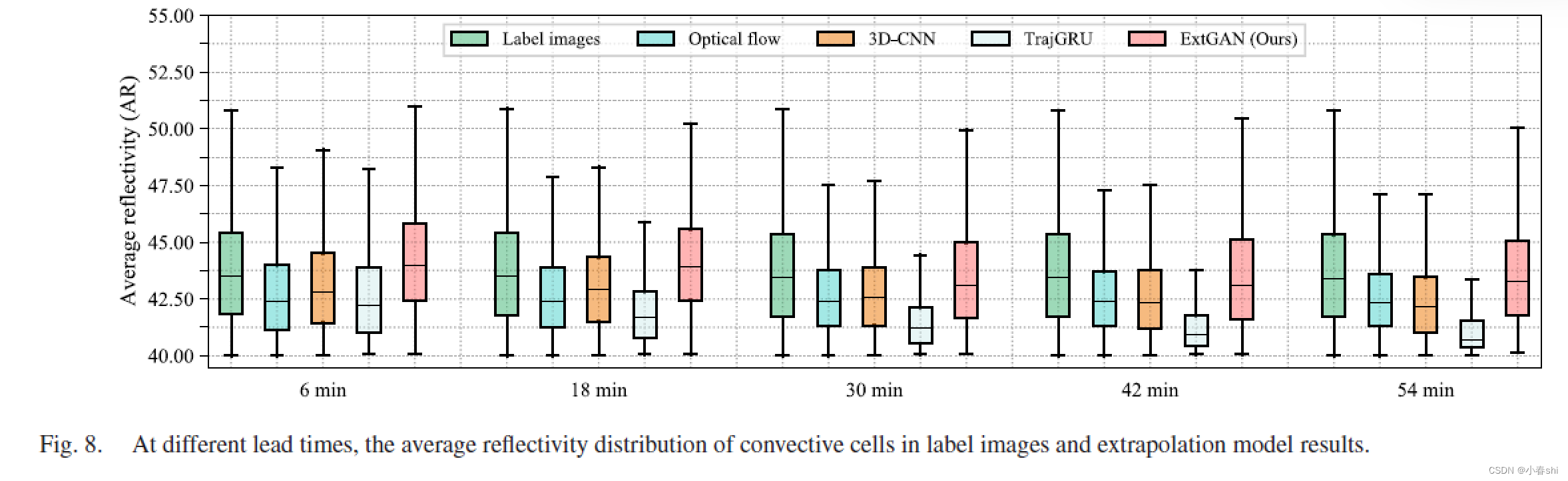

模型的AR也表现出与MR相同的趋势(见表II,图8)。标签图像中的对流云团具有最高的AR,并且几乎随时间保持一致。ExtGAN的AR最接近标签,并且随时间保持稳定。三个基线模型的AR与标签之间存在较大差距,并且迅速下降。3-D-CNN在基线模型中表现最佳。包含在外推结果中的对流云团数量与标签图像中的数量之间的一致性如图9所示。对于每个子图,横轴表示实际的对流云团数量,纵轴表示预测的对流云团数量。第一列中的子图是所有测试样本的平均结果。ExtGAN的结果与标签的一致性最好。TrajGRU和3-D-CNN的结果相似,但略差一些。光流模型的结果最差。第二到第五列是不同时刻的结果。ExtGAN在每个时刻都表现出最好的一致性。随着时间的推移,所有外推模型的一致性都在减小。TrajGRU和3-D-CNN在这种下降中表现类似。光流模型的一致性下降速度最快,而ExtGAN的一致性下降速度最慢。
4. 案例研究:图10展示了位于天津雷达上的一个气象过程。图10中的气象过程强度较弱,不容易产生高影响的气象危害。对流云团小而相互孤立,不构成气象过程的正确模拟只需准确估计运动并考虑回波的强度变化。所有模型在第一个时刻都进行了准确的预测。随着时间的推移,模型之间出现了明显的差异。光流预测范围逐渐缩小,回波强度的变化完全被忽略。随着时间的推移,3-D-CNN和TrajGRU模型的回波范围与实际回波大致相同,最大强度没有显著减弱。然而,这两种模型之间仍然存在差异。3-D-CNN外推的回波范围较小,回波区域之间的边界清晰。TrajGRU倾向于夸大预测范围,导致每个区域粘在一起。这两种模型还具有相同的缺点。它们倾向于高估主要回波区域的强度,但低估对流云团的强度。同时,外推中的小尺度细节逐渐丧失,边界变得平滑,无法正确估计回波内部的强度分布。ExtGAN表现出最佳性能。ExtGAN的外推更加逼真,每个部分的分布和细节也得以保留。随着时间的推移,我们的外推质量没有发生显著变化,强度与标签图像更一致。对于雷达图像中的对流云团,我们的外推更接近实际图像,包括位置、强度和形状细节。在能量和波长角度的类似结果
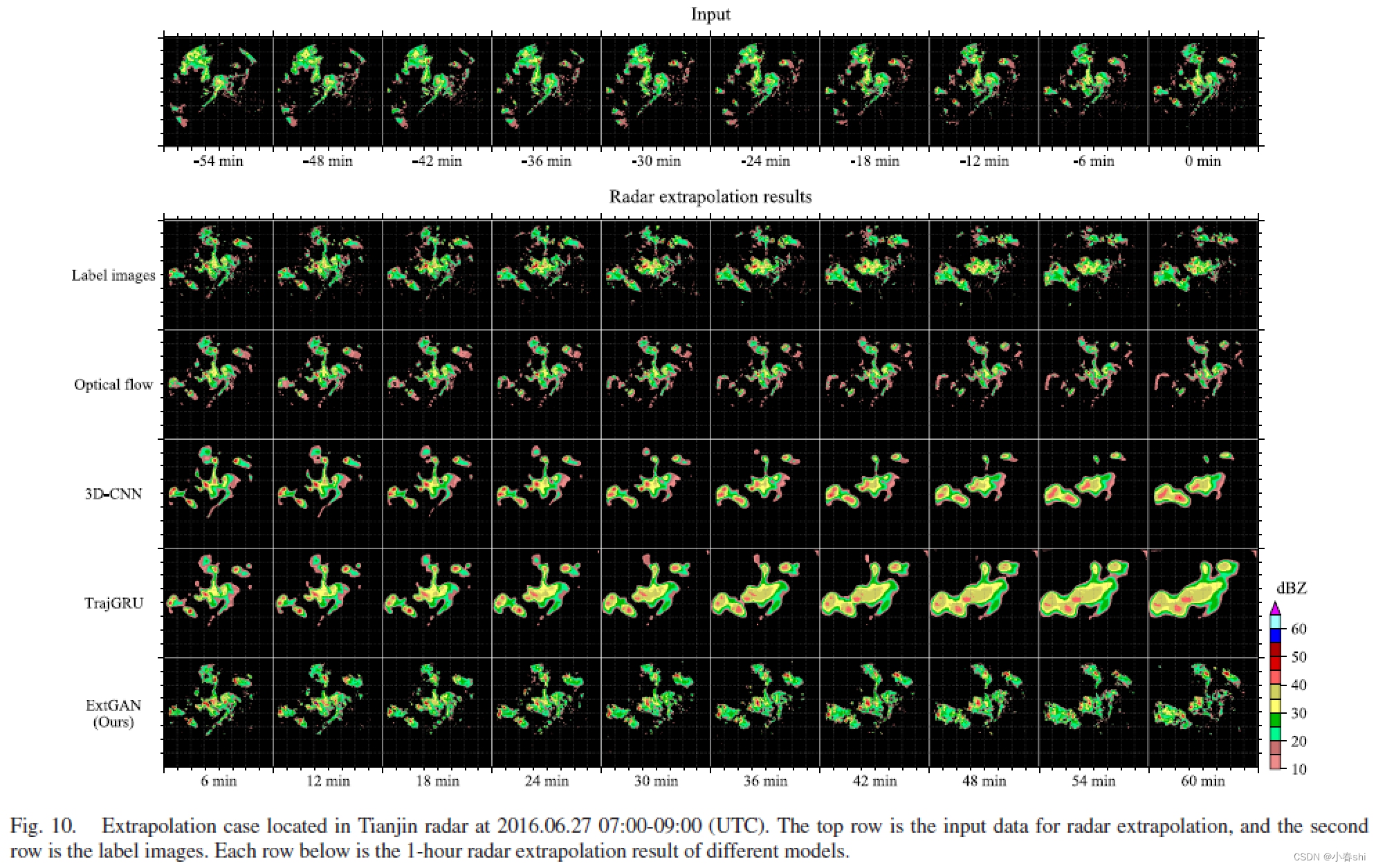
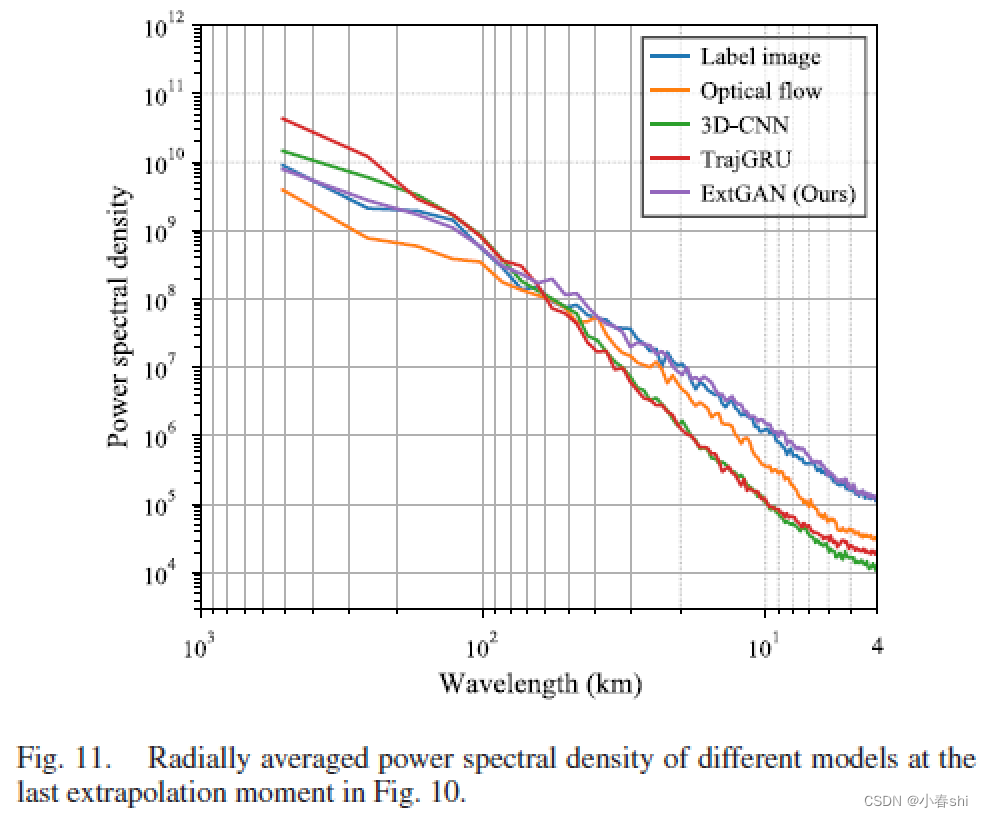
从图11中可以看到。图11显示了不同模型在图10中最后时刻外推结果的径向平均功率谱密度(RAPSD)[68]。RAPSD表示了不同波长下雷达图像的能量分布。两种机器学习方法中回波的高频细节丧失导致它们在短波段上的能量比标签低。由于低估回波范围,光流方法在长波段上具有最小的能量。ExtGAN能够在全频段上与标签的分布更一致,这表明我们的方法可以使雷达回波具有更精确的强度和结构。
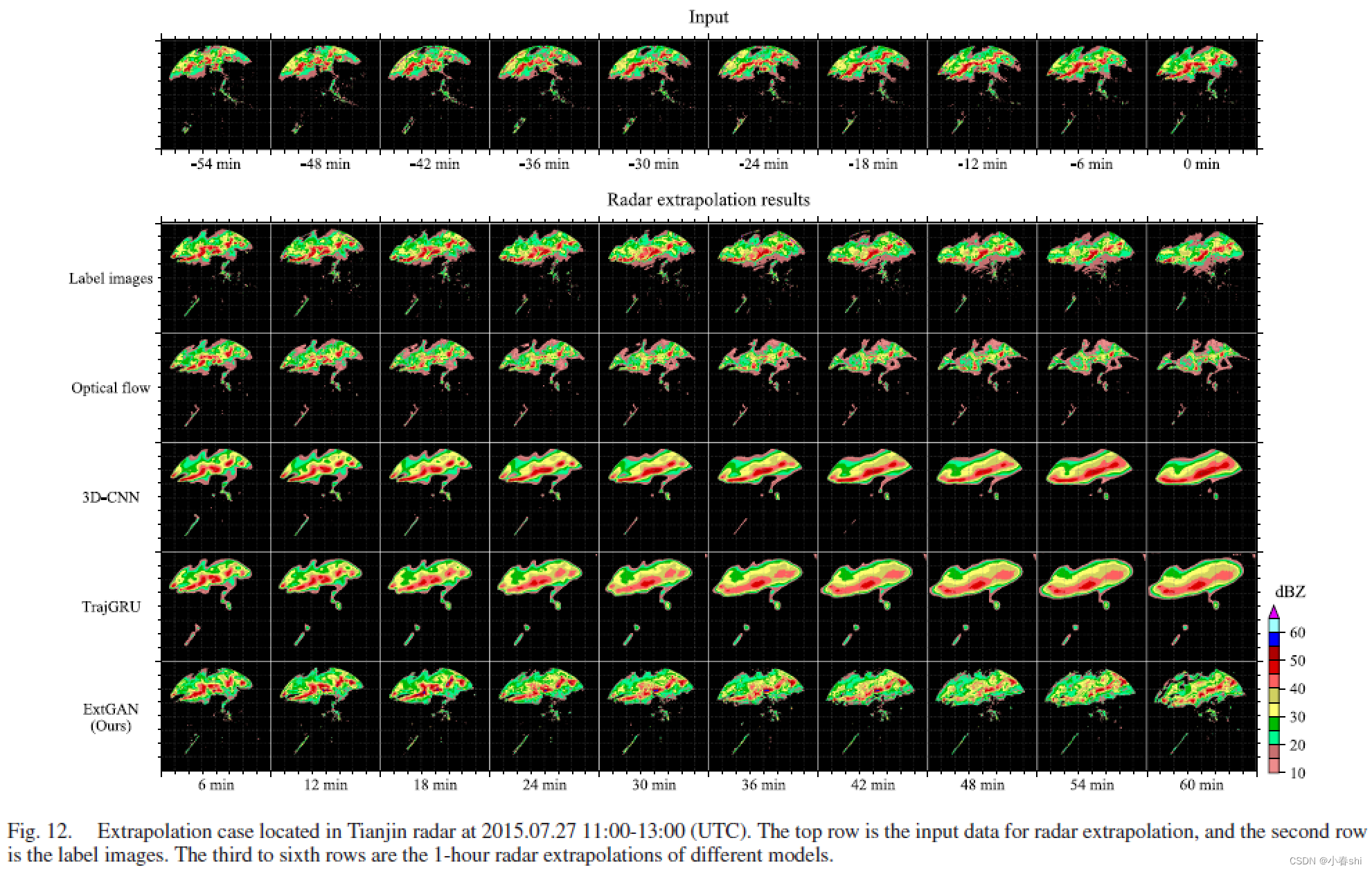
图12显示了包含对流系统的气象过程。由多个对流云团组成的中尺度对流系统通常会引发严重的危害。正确预测这个多细胞对流系统需要模型不仅准确估计运动和强度变化,还要具备建模对流云团之间复杂相互作用的能力。如图12所示,所有模型在第一个时刻的外推结果大致准确。随着时间的推移,光流模型的预测范围逐渐缩小。3-D-CNN和TrajGRU模型在预测范围、位置和强度方面与标签图像大致相同。然而,在外推过程中,这两种方法逐渐丧失回波的细节,回波的边界变得平滑。同时,对流系统云团之间的边界也丧失了,整个系统被预测为一个强回波带。不同之处在于,3-D-CNN更倾向于预测一个更强的对流系统,而TrajGRU倾向于预测一个更大的对流区域。ExtGAN仍然表现出最佳性能。它不仅准确预测了对流系统的移动方向,还使外推结果更加逼真。保留了回波的更多细节,对流系统内部的细胞之间的空间关系与标签图像更一致。随着时间的推移,ExtGAN能够保持外推结果始终具有高质量,不丧失细节。
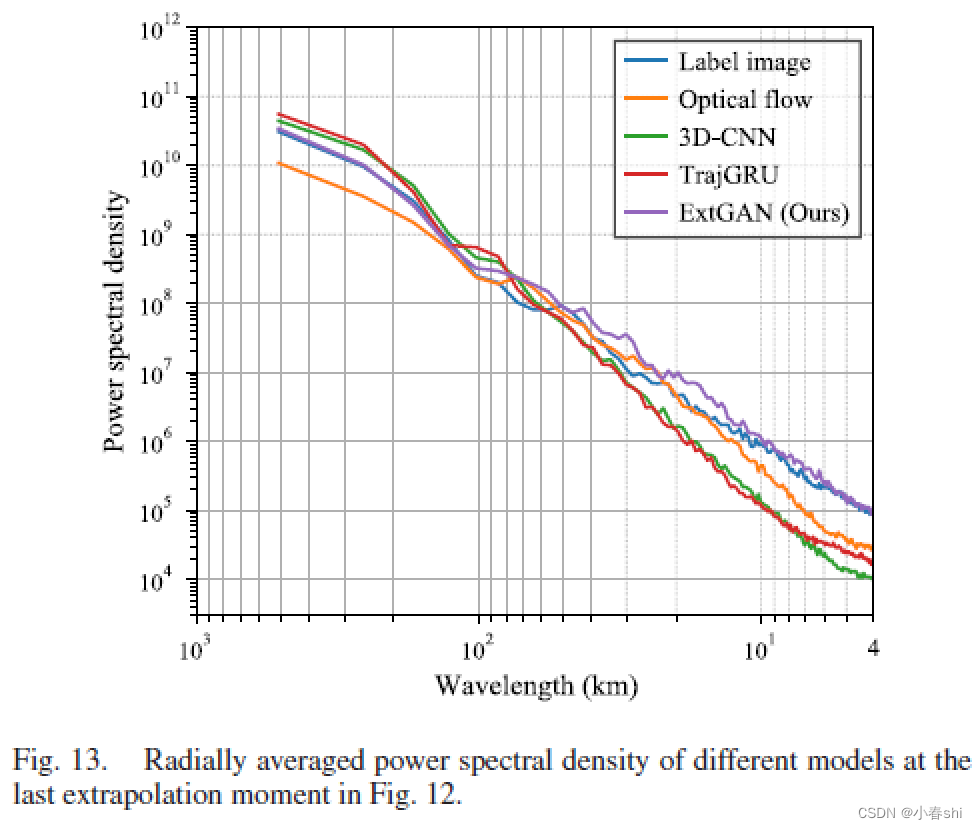
图13显示了图12中的RAPSD。基线模型在外推过程中失去了回波细节。与标签相比,在短波段上它们的能量也丧失了。由于低估回波范围,光流方法在长波段上的能量最小。ExtGAN能够有效地保持外推结果中的回波强度和结构。因此,ExtGAN与标签之间的RAPSD最一致。
5.讨论&结论
A. 像素级模型性能
像素级评估结果(见表II,图6)显示ExtGAN具有出色的性能。特别是对于大于50 dBZ的区域,ExtGAN具有显著优势。这些区域表示对流细胞的核心,通常会引发严重的危害。然而,对于具有较低反射阈值的区域,ExtGAN的性能与其他ML模型相似。偏差分数的结果可以解释这一现象。随着反射阈值的增加,我们的偏差分数保持稳定,这表明我们的模型对不同强度的反射赋予了相同的重要性。然而,TrajGRU和3-D-CNN方法在低反射阈值下具有更高的偏差分数,而在高反射阈值下偏差几乎为零。这表明这两个模型在雷达外推过程中更加关注低反射区域。换句话说,它们更倾向于将雷达回波预测到较低的强度。因此,这两个模型在较低反射阈值下具有更高的分数。然而,代价是TrajGRU和3-D-CNN几乎完全缺乏预测严重危害的能力。此外,TrajGRU和3-D-CNN的性能也不同。总体而言,尽管这两个模型更喜欢预测较低的回波强度,但TrajGRU更倾向于通过过度预测来减少错误,而3-D-CNN则倾向于通过低估来减少错误。随着时间的推移(见图6),TrajGRU的FAR和偏差的增长率以及POD和ETS的衰减率都高于3-D-CNN。这表明TrajGRU模型的误差积累速度比3-D-CNN快。这是由于这两个模型的原理差异造成的。TrajGRU在外推过程中使用相同的状态转换矩阵进行逐步运行,随着时间步长的增加,误差会累积。当3-D-CNN执行外推时,所有时刻的外推同时产生,这意味着3-D-CNN的误差没有这样的累积过程,而是更分散地分布在不同的前导时间中。3-D-CNN的这一特点使得不同前导时间的外推误差相似,并减少了潜在多模态对后处理模型的影响。因此,3-D-CNN用于ExtGAN的预外推,而CGAN用于克服3-D-CNN的缺点,并有效提高ExtGAN预测对流危险的能力。
B. 基于对流细胞的模型性能
基于对流网格的评估从另一个角度证实了ExtGAN的优势。对流网格是对流危险预测的基本单位,也是许多其他研究的起点。表III显示,ExtGAN对网格强度的预测与真实雷达数据一致,而其他模型的估计远低于真实数据。图7和图8进一步说明了ExtGAN在时间维度上的高质量。这一结果与基于像素的评估结果一致,表明ExtGAN能够更准确地估算对流系统。图9显示,ExtGAN还具有出色的网格数量预测能力。网格数量可以被视为细胞之间分离程度的指标。对网格数量的准确预测可以为危险着陆区域的预测提供坚实的基础。TrajGRU和3-D-CNN倾向于低估对流网格的数量。这是因为低估雷达回波强度导致细胞边界消失和细胞合并。ExtGAN克服了这个缺点。它受益于对细胞强度的正确估算以及CGAN带来的外推的“真实性”。这种真实性在案例研究部分得到了充分证明(见图10-12)。与其他模型相比,我们的外推不仅更具视觉真实性,而且强度分布和内部结构也更符合真实雷达数据。尽管这并没有显著提高像素级分数,但使回波具有更多小尺度的细节,使得可能基于对流细胞进行基于外推结果的研究。
C. 损失函数
TrajGRU和3-D-CNN倾向于低估雷达回波的强度,并导致回波结构的细节丢失。然而,ExtGAN可以提供更真实的外推。区别在于前两种方法使用基于均方误差(MSE)的损失函数进行模型训练监督,而我们使用CGAN来训练ExtGAN。MSE损失函数使模型的性能变差。这不仅是雷达外推的问题,也是机器学习领域的研究所报道的问题。像素级MSE对异常值敏感,增加了预测局部极值的风险,并使模型更倾向于预测图像的均值。当这个特性引入到雷达
6.总结
本文的贡献如下。
- 提出了一种名为ExtGAN的两阶段雷达外推模型,该模型基于3-D-CNN和CGAN。三维卷积神经网络负责雷达回波的预外推,而CGAN用于对预外推结果进行后处理。最终,可以获得准确而精确的雷达外推结果。
- 使用CGAN来减少基于像素的损失函数在基于机器学习模型的外推中引起的模糊现象。ExtGAN的外推结果具有更多的小尺度细节,并且更符合真实雷达回波的结构。
- 与其他基于机器学习的外推模型相比,ExtGAN能够更准确地预测通常导致严重危害的对流云团。
- 讨论了MSE损失函数在雷达外推问题中的适用性,并提出了改进的方法。
尽管ExtGAN表现出色,但未来仍然需要解决一些问题。雷达回波的可预测性随着时间的推移逐渐恶化,因为雷达回波的寿命是有限的。特别是对于对流系统,在主导时间超过回波寿命时,仅基于雷达数据很难预测初始状态的雷达回波。我们希望在未来引入环境领域信息到外推模型中,以提高对雷达回波变化的预测,并进一步增加雷达外推的主导时间。此外,MSE作为像素级别的损失函数不适用于对流系统的外推,也不适用于从对流危害的角度评估外推结果。卷积神经网络可以从雷达图像中提取高级特征。这些特征可以全面地表征雷达图像信息,既包括全局结构又包括局部细节。因此,CNN特征可以用来替代像素级雷达反射率,作为雷达外推结果与标签之间相似性测量的基础。未来,我们希望引入CNN来开发一种对流系统外推的评估方法。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









