






前言:
本人在此之前没有太多使用Ubuntu板载系统的开发经验,而RDK X5又是刚刚发行的开发板,存在的教程资料比较少,因此在开始阶段踩过一些坑。希望能通过这篇blog给跟我一样的纯新手一个简易的入门教程,并附上每一步的解释方便学习。blog将从前期需要的装备出发,讲解系统烧录,WIFI连接,最后到YOLOv5的样例测试以及远程连接。
我参考的blog:[RDK X5][001]初见地瓜机器人RDK X5:配置与简单测试-CSDN博客
及官方教程 :地瓜开发者社区首页
前期准备
需要的相关配套设备。 TF卡/显示屏/HDMI线(请注意存在三种不同规格的HDMI)
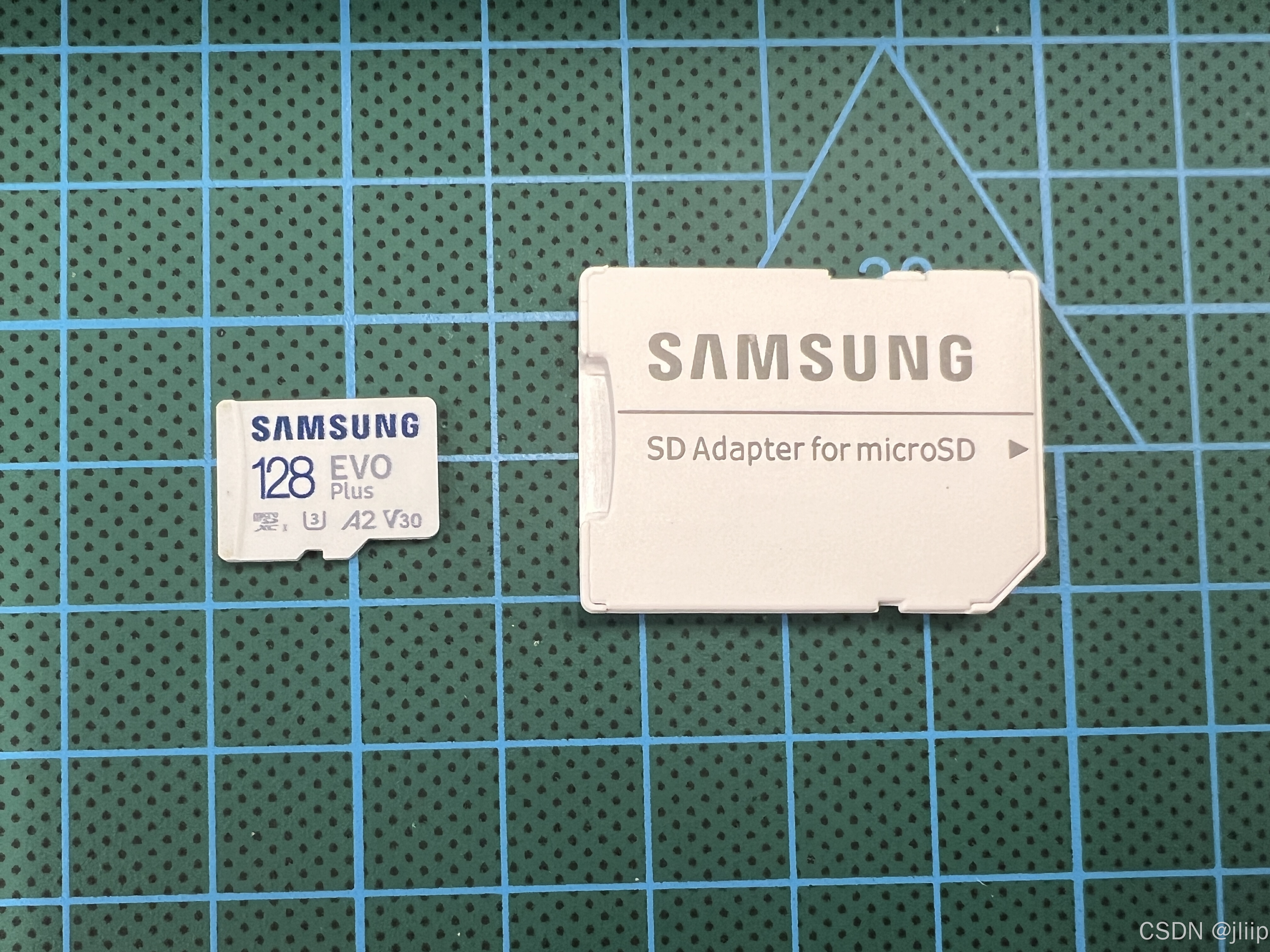
首先不得不强调的是TF卡,也可以叫micro SD卡。TF卡和SD卡的区别就是一个大小的问题,以下图的三星卡为例,左侧小的这个就是TF,把TF放入大的卡槽组合起来就是SD卡。一般购买时都会同时提供这两者,可以凭自己需要使用。绝大部分笔记本电脑提供的是SD卡槽,而这里我们使用TF卡槽。最好准备32G及以上的TF卡。
其次是显示屏,及与显示屏配套的HDMI线材。虽然存在远程连接方式(如VNC/SSH),但这些功能的打开需要预先使用micro usb连接上板子进行多步设置,更适合在后续扩展。有一块显示屏直接显示图形桌面(desktop)无疑能省下很多事,因此推荐预先备好一块显示屏。而显示屏与X5连接靠的就是HDMI。但请注意,HDMI存在三种不同规格的接口,即 HDMI/HDMI micro/HDMI mini。在RDK X5中,提供的是HDMI Micro接口。因此你应该挑选与自己的显示屏(通常是HDMI或HDMI Micro)和RDK X5适配的线材。而树莓派5使用HDMI mini接口,更加地阴间。
鼠标,键盘。推荐使用USB端口与RDK X5连接。2.0或3.0没什么讲究,一般3.0更常用。也可以使用蓝牙连接,但跟上述的SSH,VNC一样,需要预先进行设置,因此这里更加推荐一开始先用USB的鼠标,键盘。
系统安装
以下是RDK的规格参数
| CPU | 8X A55@1.5GHz(ARM64架构) |
| BPU | 10 TOPS |
| GPU | 32Gflops |
| 内存 | 4GB/8GB LPDDR4 |
| 存储 | NA,supports external Micro SD card |
| 多媒体 | H.265(HEVC)Main Profile @L5.1,H.264(AVC) Baseline/Constrained Baseline/Main/High Profiles@ L5.2 with SVC-T encoding H.265/H.264 encoding and decoding up to 3840x2160@60fps |
| Sensor | 2 x 4-lane MIPI DSI |
| USB Host | 4 x USB 3.0 hOST INTERFACES(tpye A) |
| USB Device | 1 xUSB 2.0 Device interface(Tpye-C) |
| 耳机接口 | 1x 3.5mm headphone jack audio input/output |
| 显示接口 | 1x HDMI Type-A port supporting up to 1090p60 1 x MIPI DSI 4 Lane |
| 有线网络 | 1x Gigabit Ethernet RJ45 port with PoE |
| 无线网络 | Wi-Fi 6 BlueTOOTH 5.4 |
| 6 Bluetooth 5.4CAN | 1x CAN FD |
| 其他IO | 28 GPIOs |
| 电源输入 | 5V/5A |
| 系统支持 | Ubuntu 22.04 |
可参考地瓜的官方教程:地瓜开发者社区首页
如果IP在海外,目前打开网页看到的海外版官网尚未更新X5的文档,需要翻回国。
将你希望烧录系统的tf卡连接至电脑,可以使用读卡器或组合成大sd卡。
打开Index of /downloads/os_images/下载x5的安装包。点开 rdx_x5/ 后显示的就是目前存在的rdk os版本,可以自行选择最新版。最后需要挑选下安装的类型,一般而言我们会使用拥有图形化桌面的版本,即desktop。将两个desktop安装包下载到电脑,解压。比较小的安装包无需烧录,主要目的是监督大安装包下载不出现传输错误。

解压完成后,以管理员身份打开PC端启动盘制作工具balenaEtcher,下载链接:balenaEtcher - Flash OS images to SD cards & USB drives
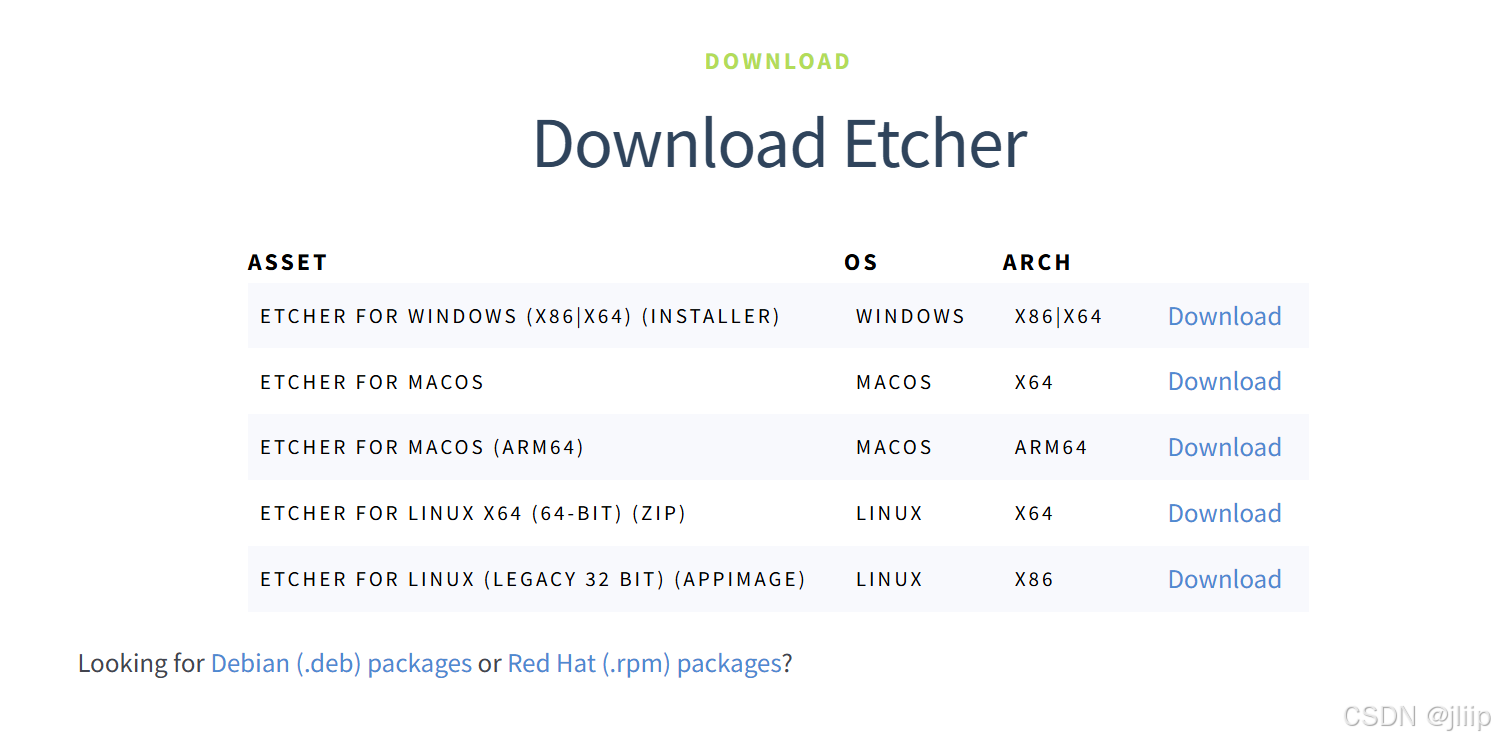

点击从文件烧录,选择刚刚解压的.img文件,随后选择目标磁盘,确认是你准备使用的SD卡,点击“现在烧录!”烧录完成后可关闭balenaEtcher并取出SD卡。
不能给RDK供电后再插入SD卡。(SD卡不支持热插拔)
启动系统
首先保证RDK X5处于断电状态,将TF卡存在金属条的那面,贴向开发板板面放入位于开发板背面的卡槽中。连接与显示屏的HDMI线,最后通过正面最左侧的tpye-c接口给RDK X5提供5V 5A的输入电源。
在开发板的正面存在两颗状态指示灯,绿灯代表开发板供电正常,橙灯代表系统运行正常。如果在上电一段时间(例如15秒)后发现橙灯没亮,说明系统烧录存在问题,需要检查下是否文件烧录出错或损坏。
系统启动需要一定时间,如果启动成功能在显示屏处看到D-Robotics的Ubuntu Desktop界面。开发板的HDMI和USB支持热插拔,所以可以连接鼠标键盘。也可以在上电前连接。

配置网络
Ubuntu桌面的右上角可以看到wifi,点开后选择希望连接的无线网络输入账号密码即可。

eduroam校园网
然而,如果跟博主一样希望使用eduroam的校园网就会麻烦一点。可以参考以下设置:
Security选择WPA & WPA2 Enterprise
Authentication 选择 Protected EAP(PEAP)
跳过Anonymous identity 及 Domain。
CA certificate 可以直接勾选No CA certificate is required
PEAP version 选择 Automatic
Inner authentication 选择MSCHAPv2
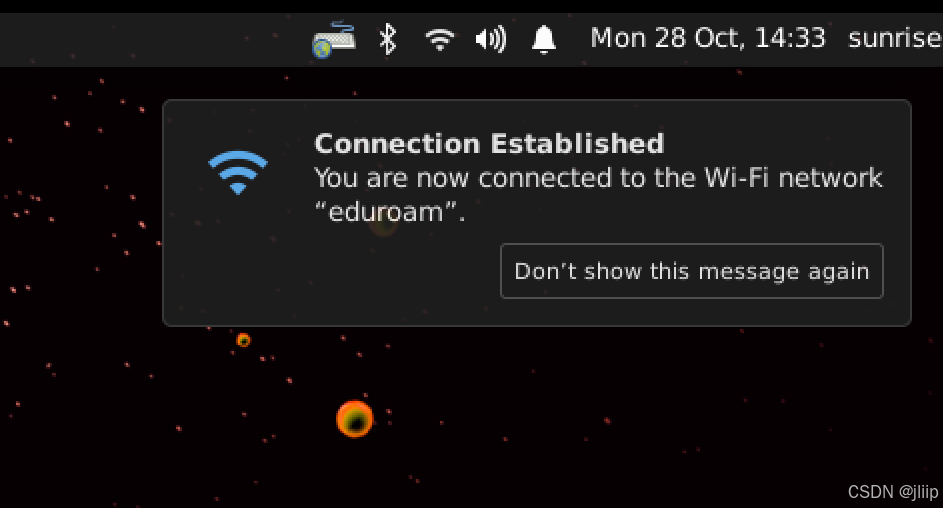
最后输入你的校园网账号密码即可。
连接成功后可以看到:
可选:SSH/VNC
即使不进行SSH/VNC设置也能跑内置的yolo算法。如果你想先跑一下试试,可以先跳过这个部分直接看后面的yolov5。
配置完WiFi后,你的RDK X5将拥有一个动态IP地址。当你的电脑设备与开发板连接到同一个网络时,就可以使用该局域网下的动态IP地址进行SSH与VNC的连接。开发板在开关机后,依然能保持分配给开发板的该局域网下的动态IP地址,这意味着经过一次设置后,你的设备能一直保持与开发板的连接,不需重复设置。
首先,你应该获取自己的动态IP地址。
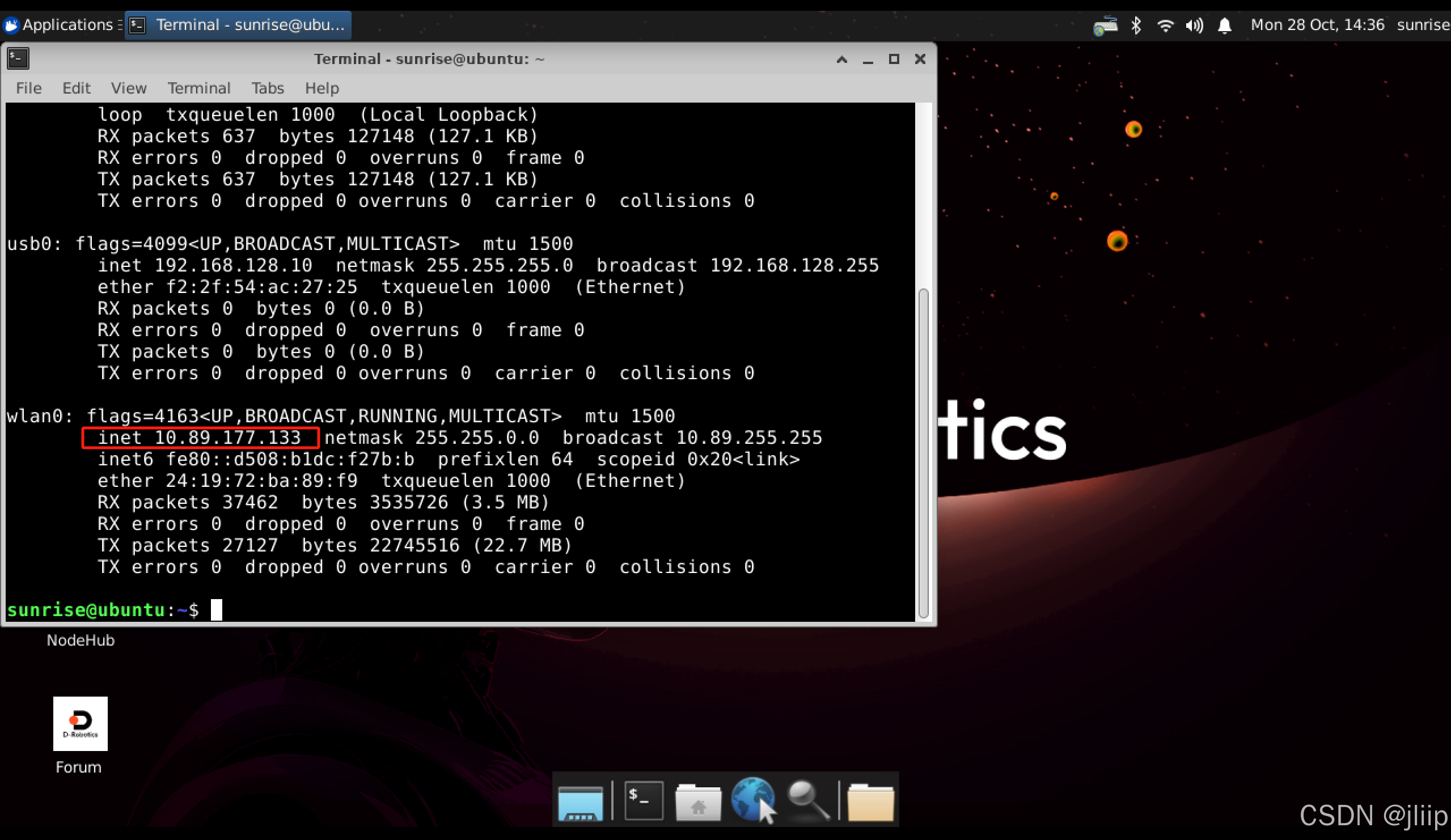
在桌面正下方提供的黑色方框$_ “Terminal”中输入: ifconfig
找到wlan0:中的inet,后面的一串就是你的动态IP地址。
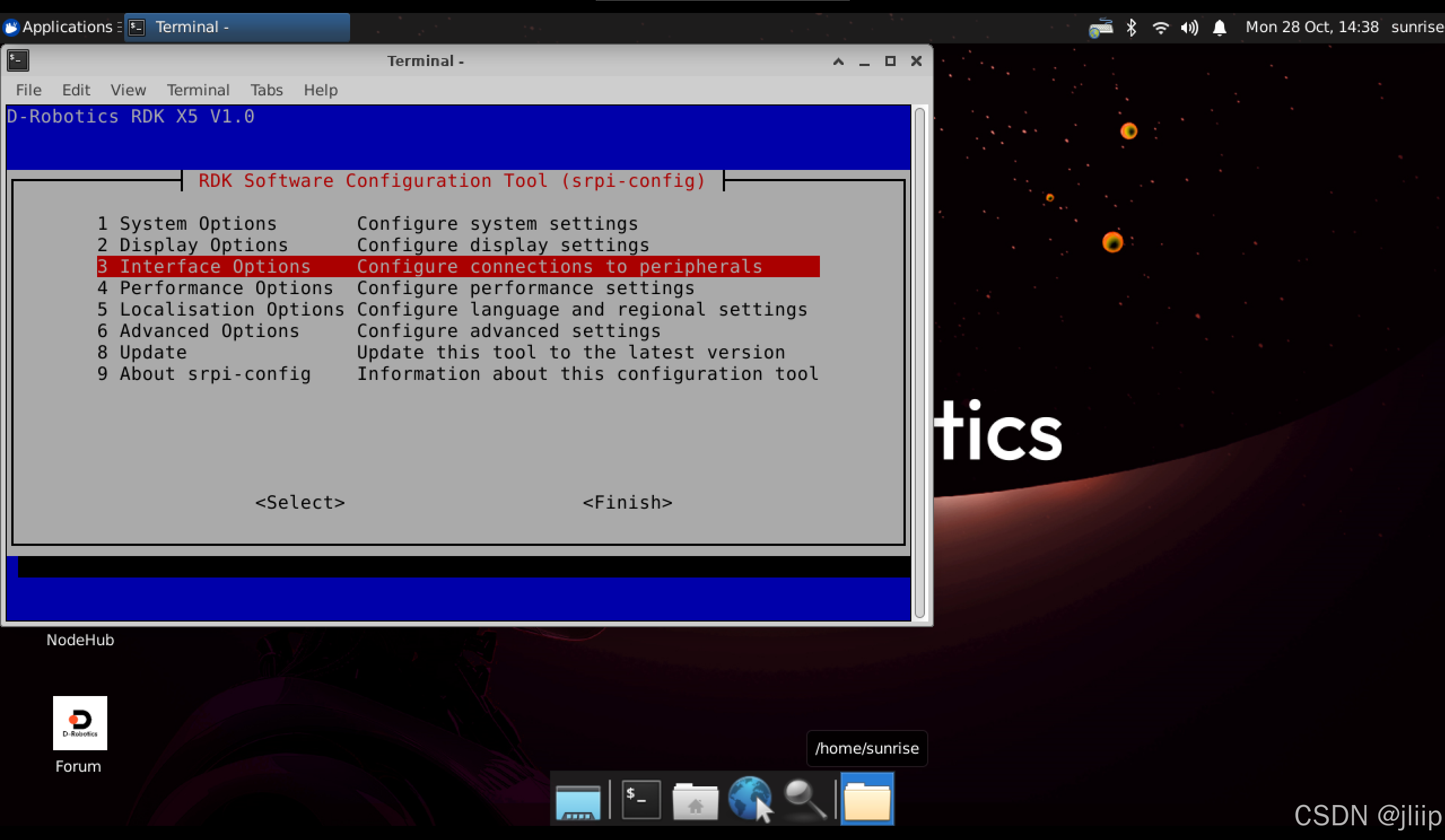
之后,需要打开system选择RDK Configuration。

选择第三个,Interface Options。
打开来可以看到SSH和VNC这两个我们需要的连接。在后续的连接设置中,你可以在这里找到板载的SSH/VNC 使能开关。
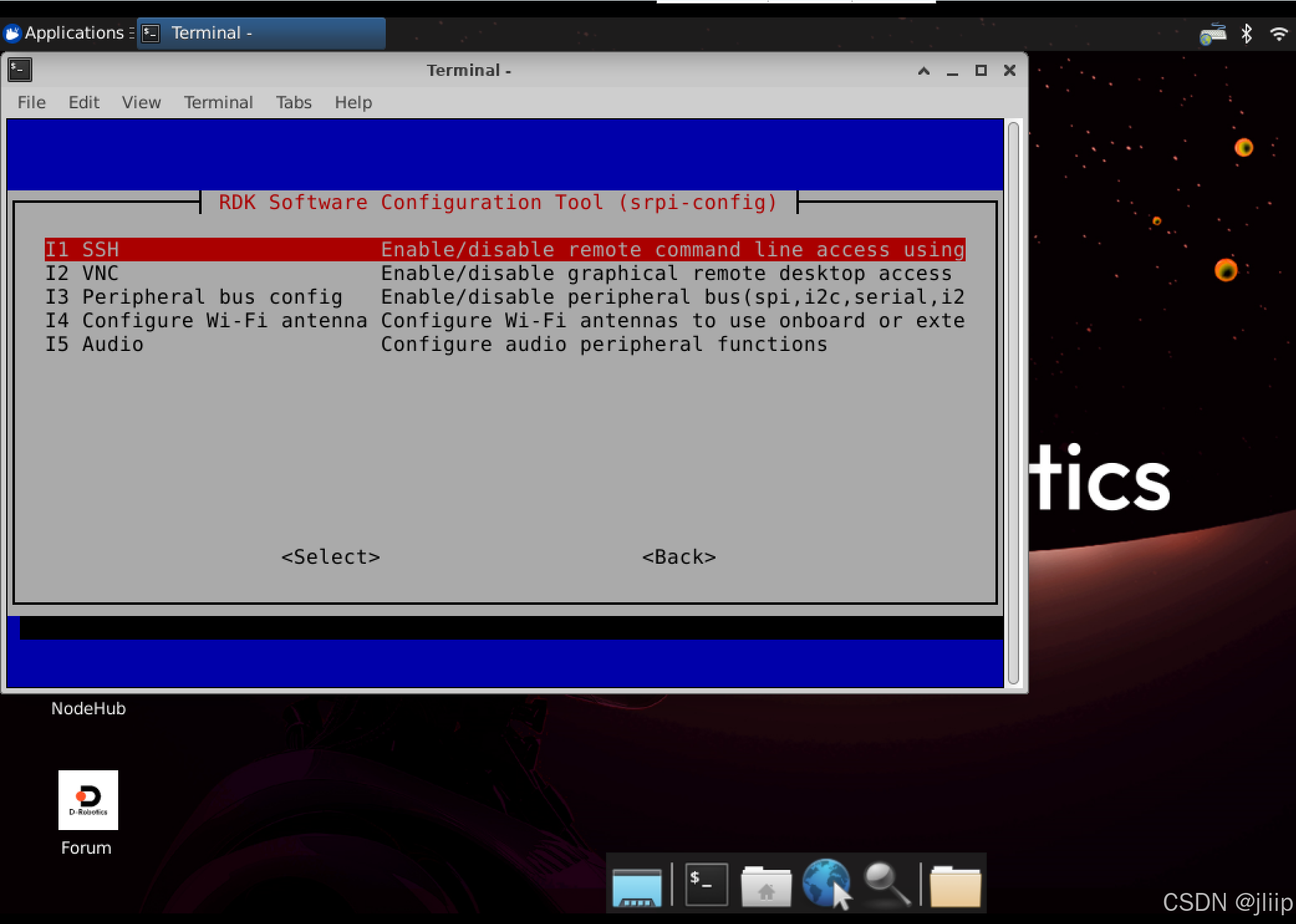
SSH
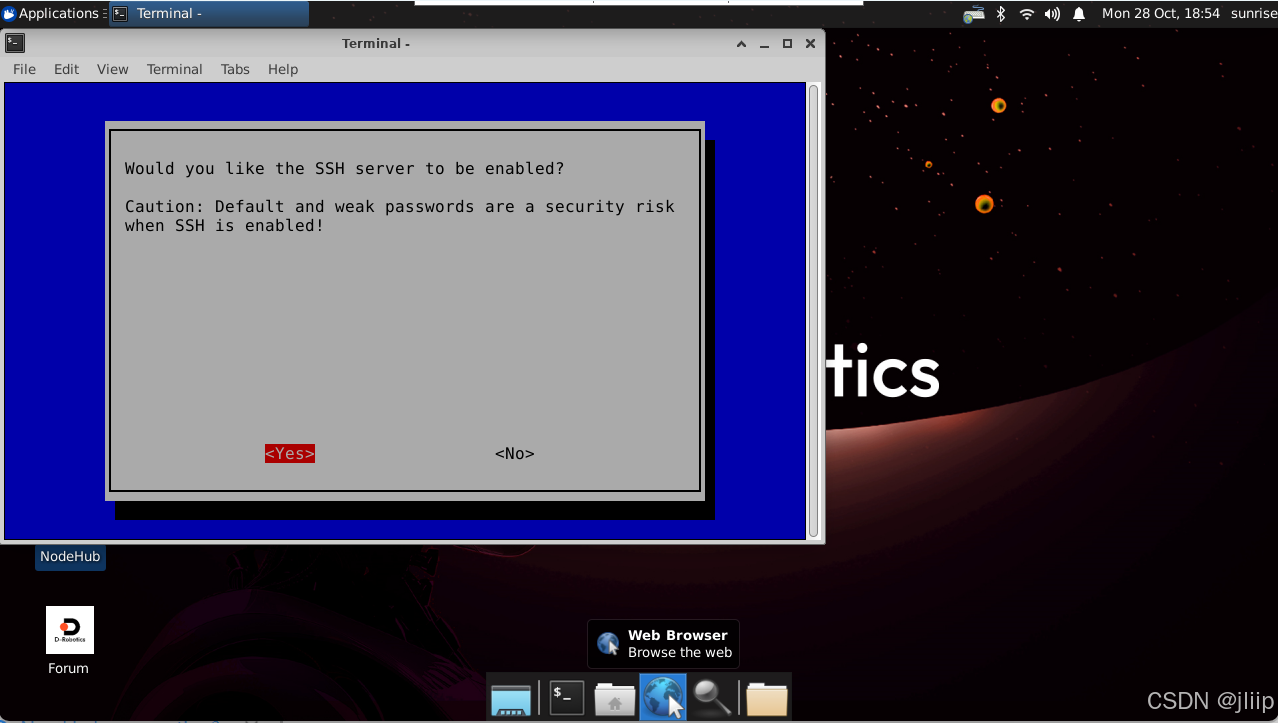
按照上一步的介绍选择11 SSH。首次设置需要输入账号密码,同样可以都输入sunrise。password的输入需要重复输入一遍在verify处,注意在输入密码时,屏幕处并不会显示你的输入。同样,也可以设置关闭。在下图的界面中选择Yes即使能打开,No则关闭SSH连接。默认状态下,SSH打开。
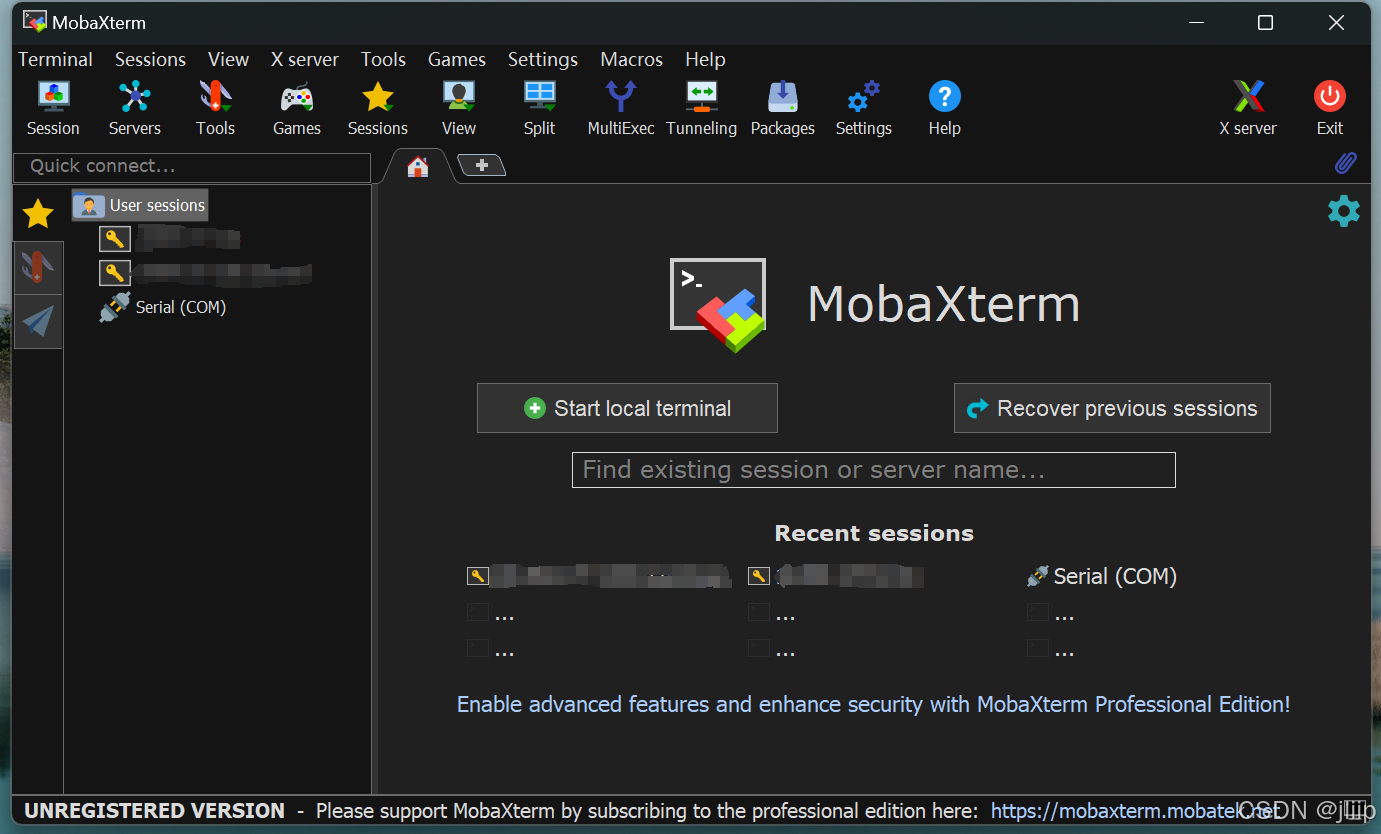
在你希望连接到开发板的设备处,我们将使用MobaXterm进行RDK X5的SSH连接。注意MobaXterm只有Windows版本。
下载连接:MobaXterm free Xserver and tabbed SSH client for Windows
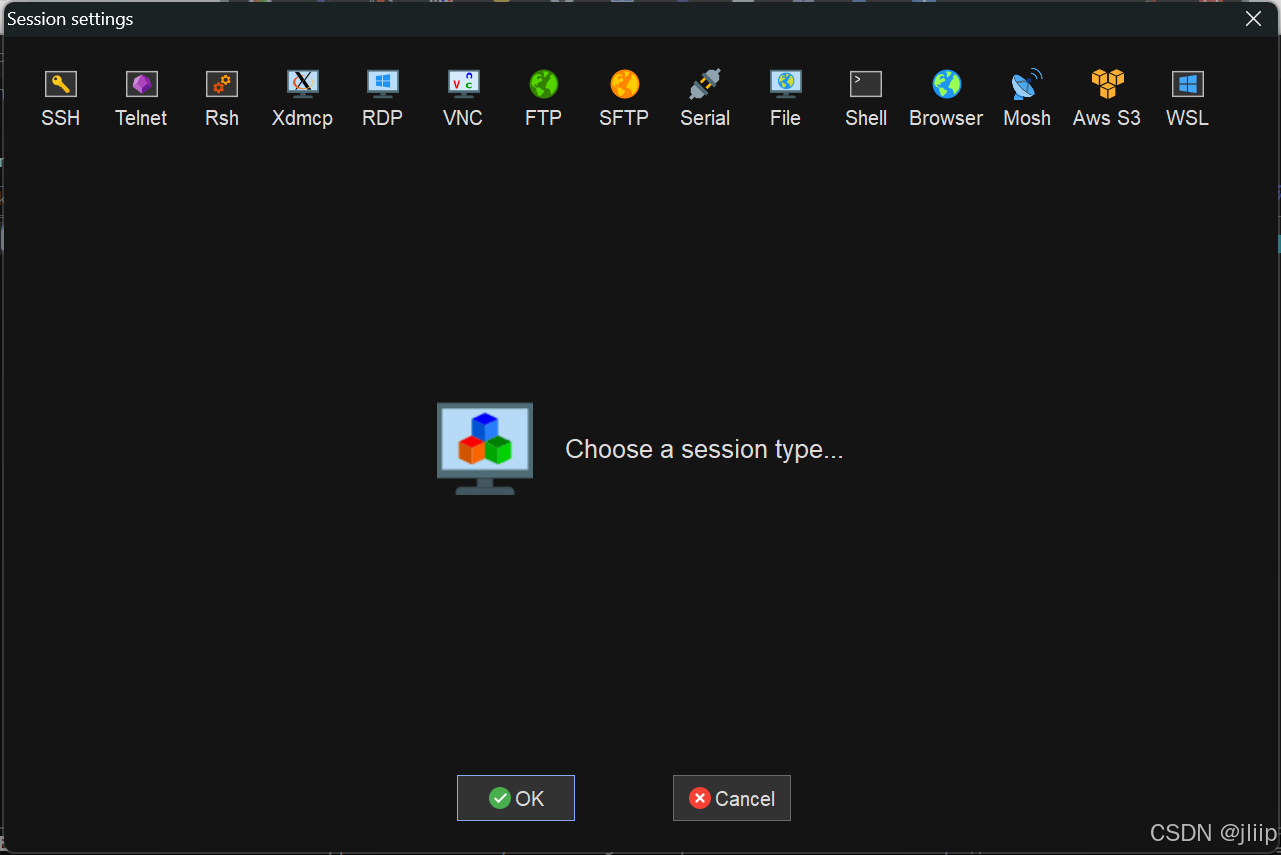
打开将看到下图界面。点击左上方的Session。
点击SSH
在Remote host处输入你之前获得的动态IP地址,Specify usename处输入sunrise,点击OK。
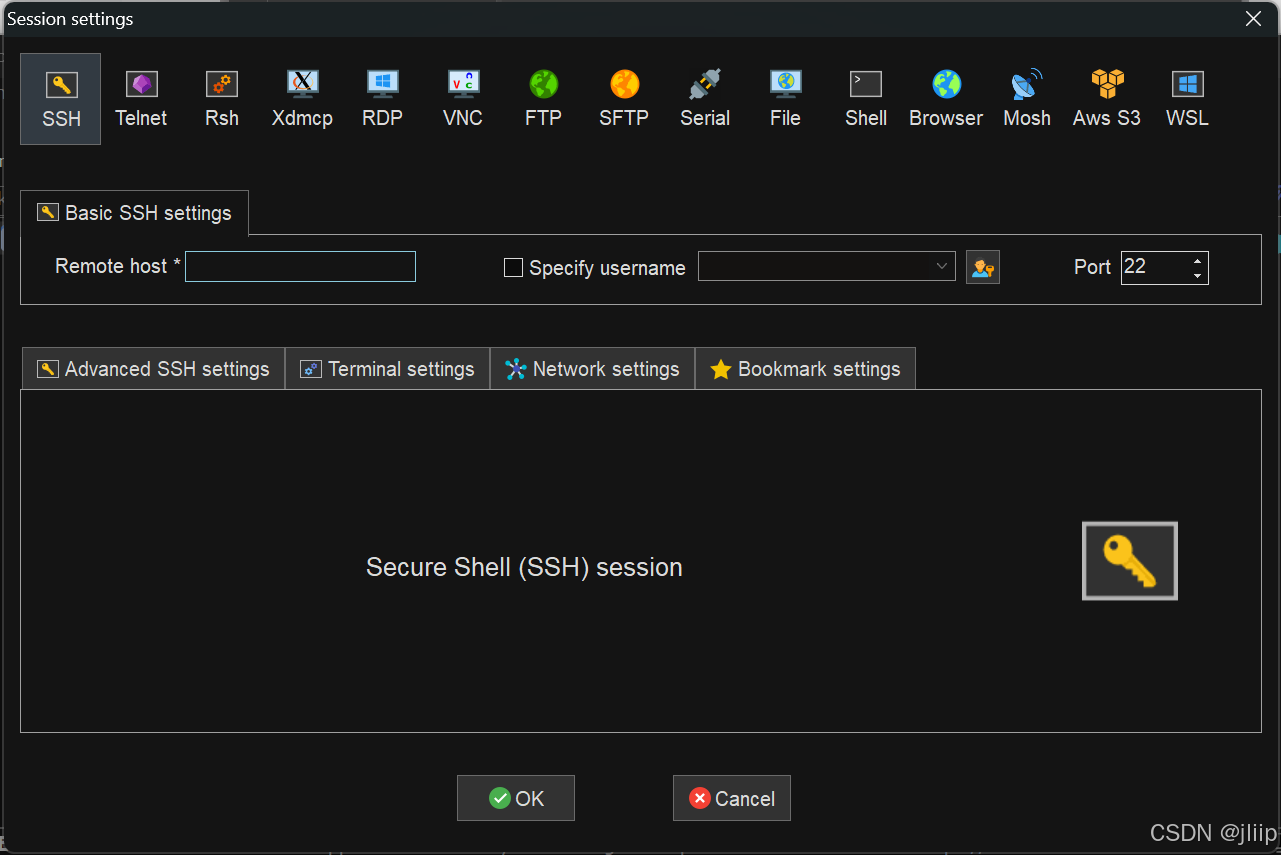
点击“OK”后,正常会弹出首次登录提醒,“Accept”即可。
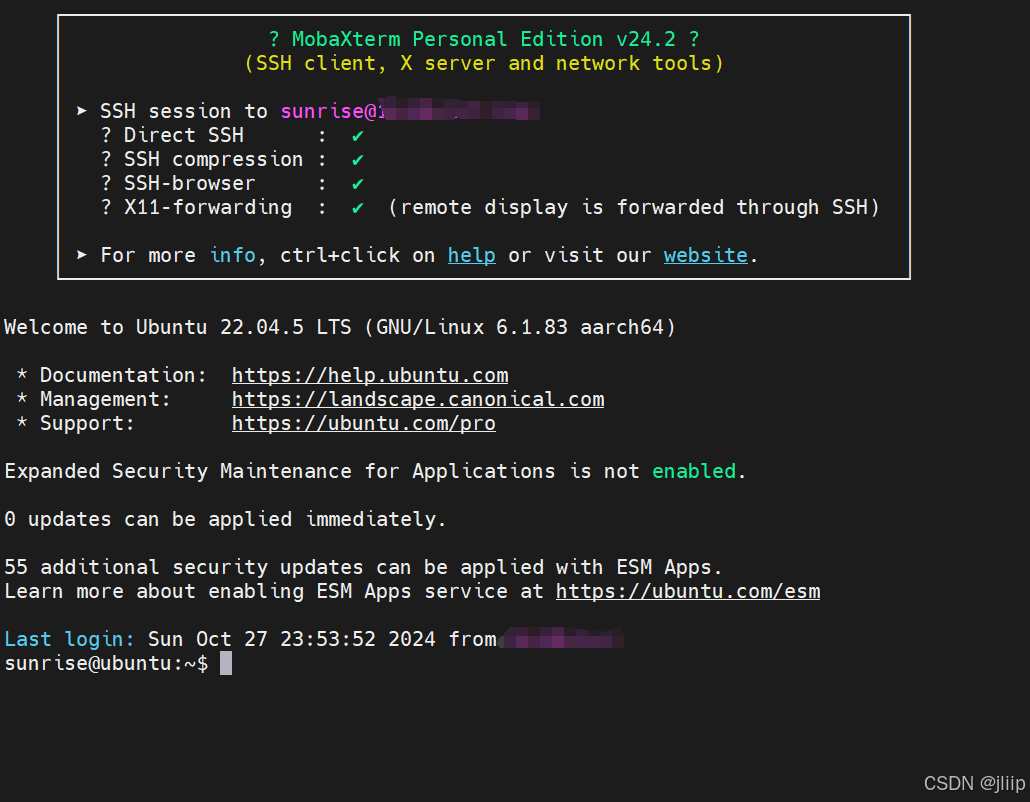
随后输入用户账号与用户密码,同样都是sunrise。登录成功将看到如下画面。
或者,你可以直接通过电脑的指令界面连接SSH。同时按下Win+R,输入cmd
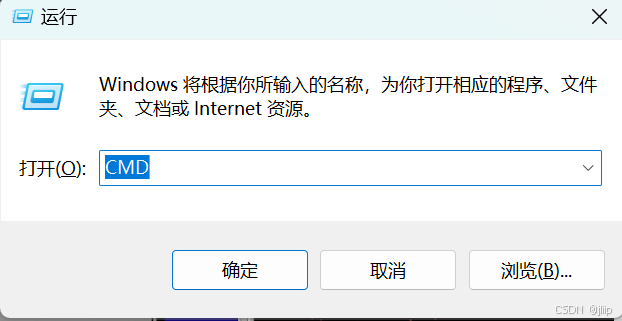
点击确定,打开命令栏后,输入 ssh sunrise@你先前得到的IP地址,回车。系统会要求输入密码,同样输入sunrise既可(依然不会显示输入)。成功连接后,会看到以下界面。
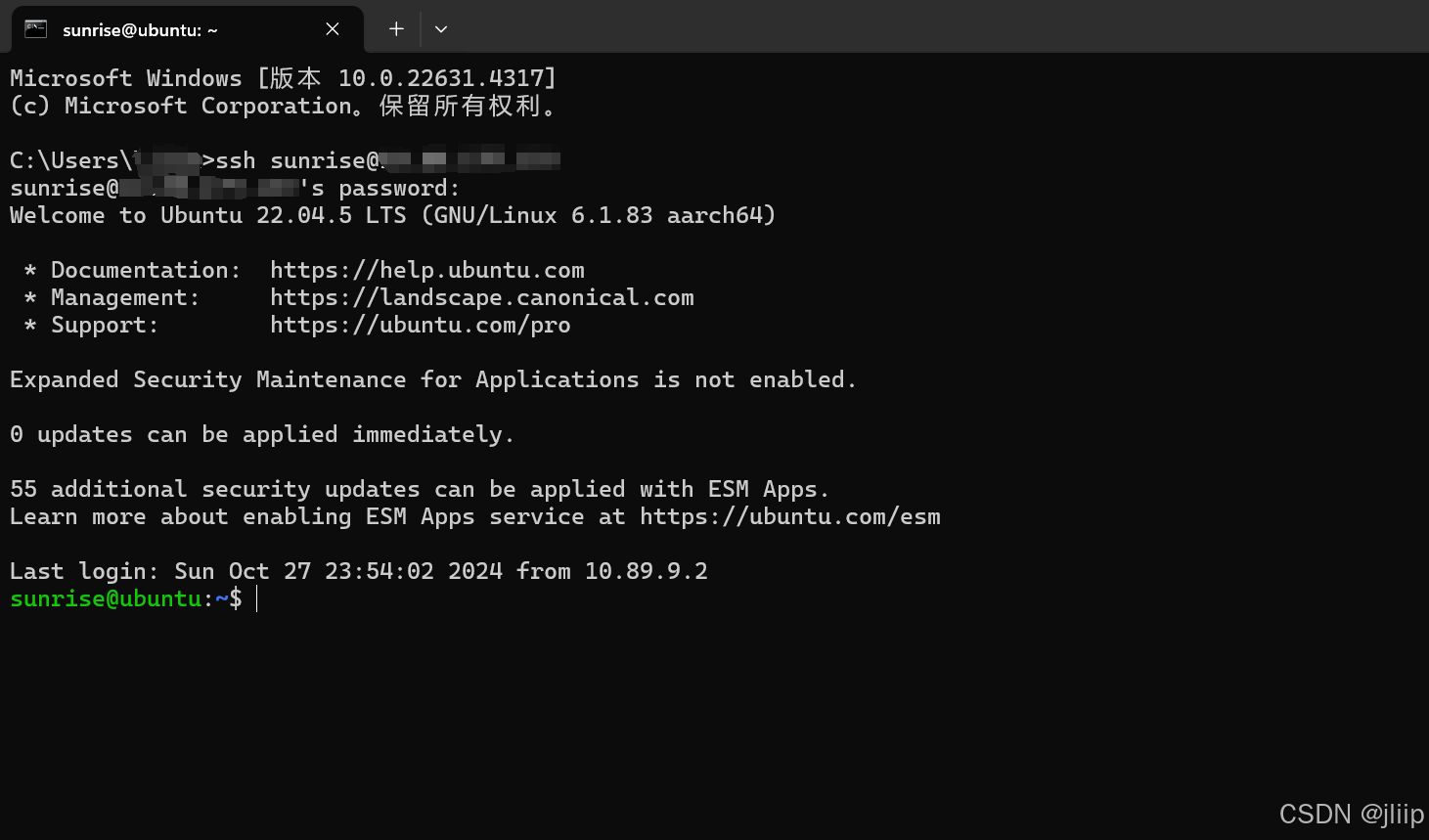
然而,SSH会为你提供远程使用RDK X5的功能,可以正常跑指令,却不能直接看到RDK的desktop。
如果希望能远程在开发板的desktop上进行操作,可以使用VNC。
VNC
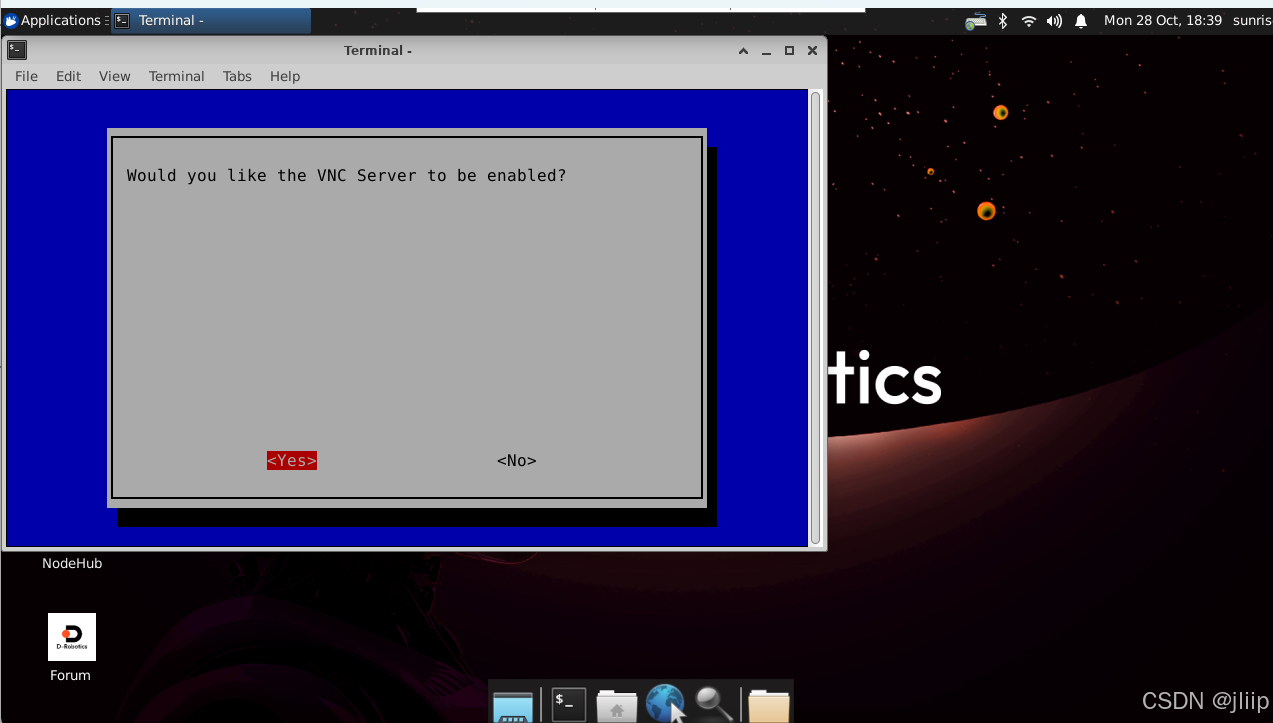
VNC的板载设置:按照先前的设定找到VNC。首次设置需要输入账号密码,同样可以都输入sunrise。password的输入需要重复输入一遍在verify处,注意在输入密码时,屏幕处并不会显示你的输入,但实际已经成功输入。最后,系统会问是否想要提供一个view-only password,意味着在PC处输入这个账号密码只会拥有查看开发板界面的权限,而无权限修改。如果不需要此功能,可以直接输入n。需要输入y,并输入其他的用户名与密码。
VNC下载链接:Download VNC Viewer by RealVNC®
VNC提供 Windows, Mac, Linux, Raspberry pi等常用操作系统版本。
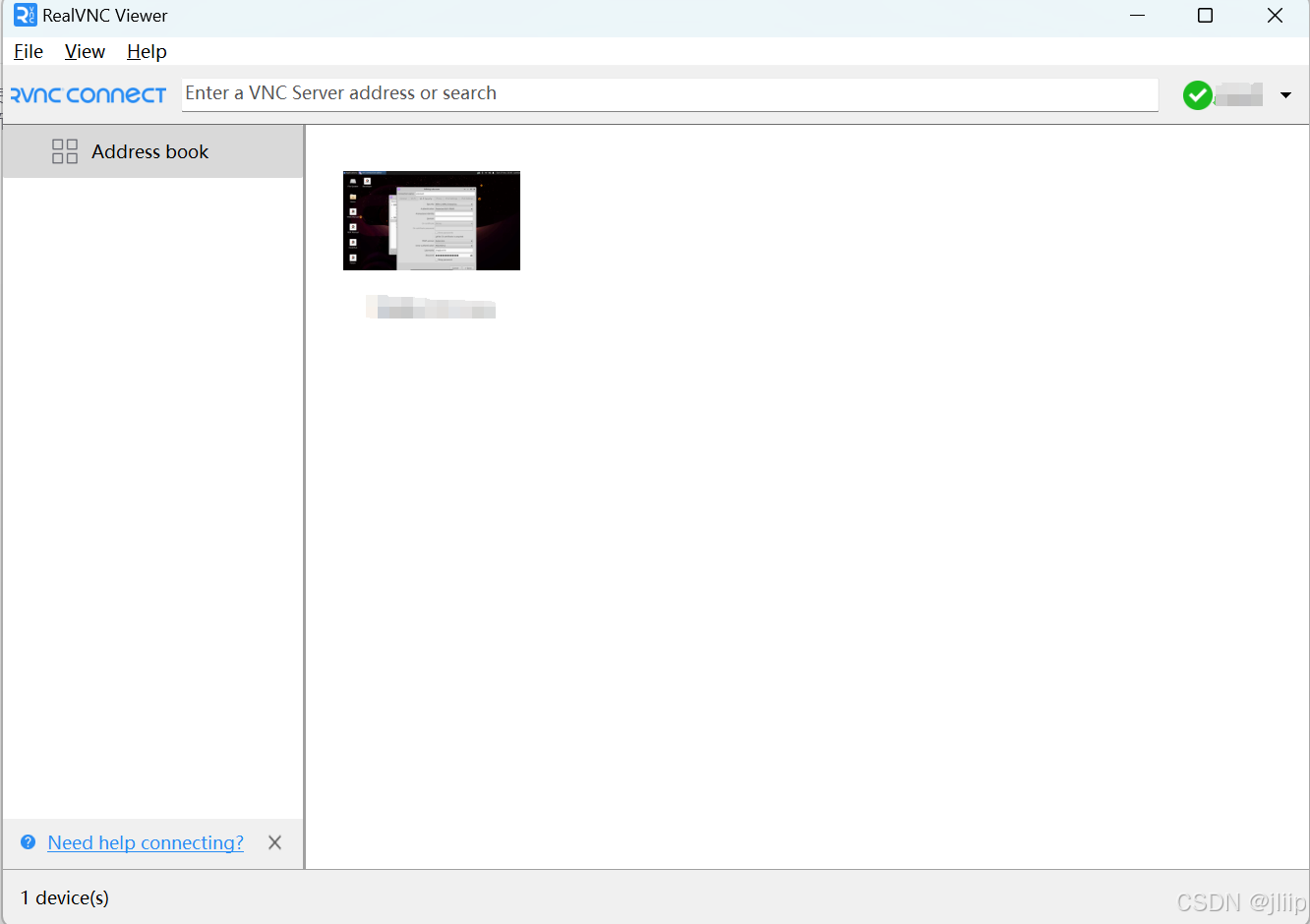
下载完电脑对应版本后,在上方的“Enter a VNC Server address or search”处输入你先前获取的动态IP地址。登录时会弹出一个连接未加密的提示。不希望以后打开会看到此提示可以点击Don't warm me about this again,后点击continue。
输入password “sunrise”,希望不用重复输入密码勾选remember, 点击OK。
成功下将能看到以下画面。你可以在开发板处于开机状态时,通过SSH/VNC方式远程连接到开发板。
Yolov5
非常方便的是,RDK X5已经封装好了yolov5及相关的库(如opencv),可以直接通过指令运行提供的样例测试。
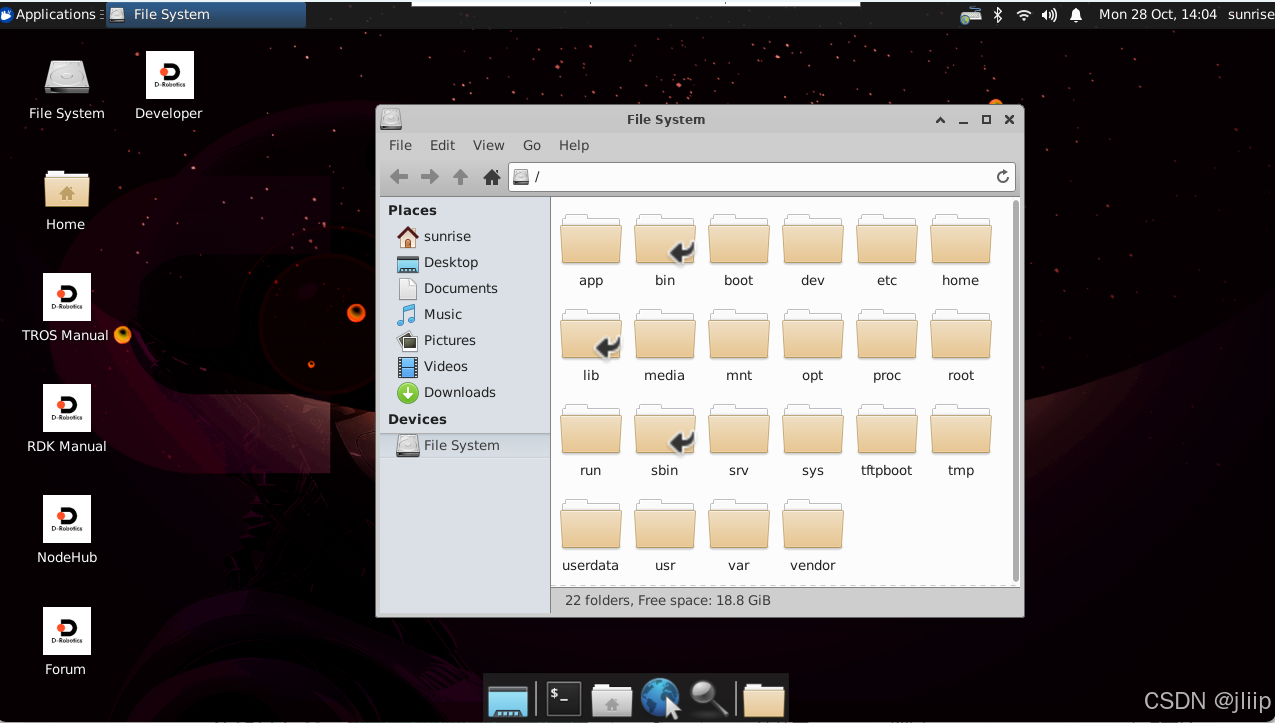
在设备中,这些样例放置在file System下的app文件中。点击pydev_demo,可以看到13个目标识别样例。
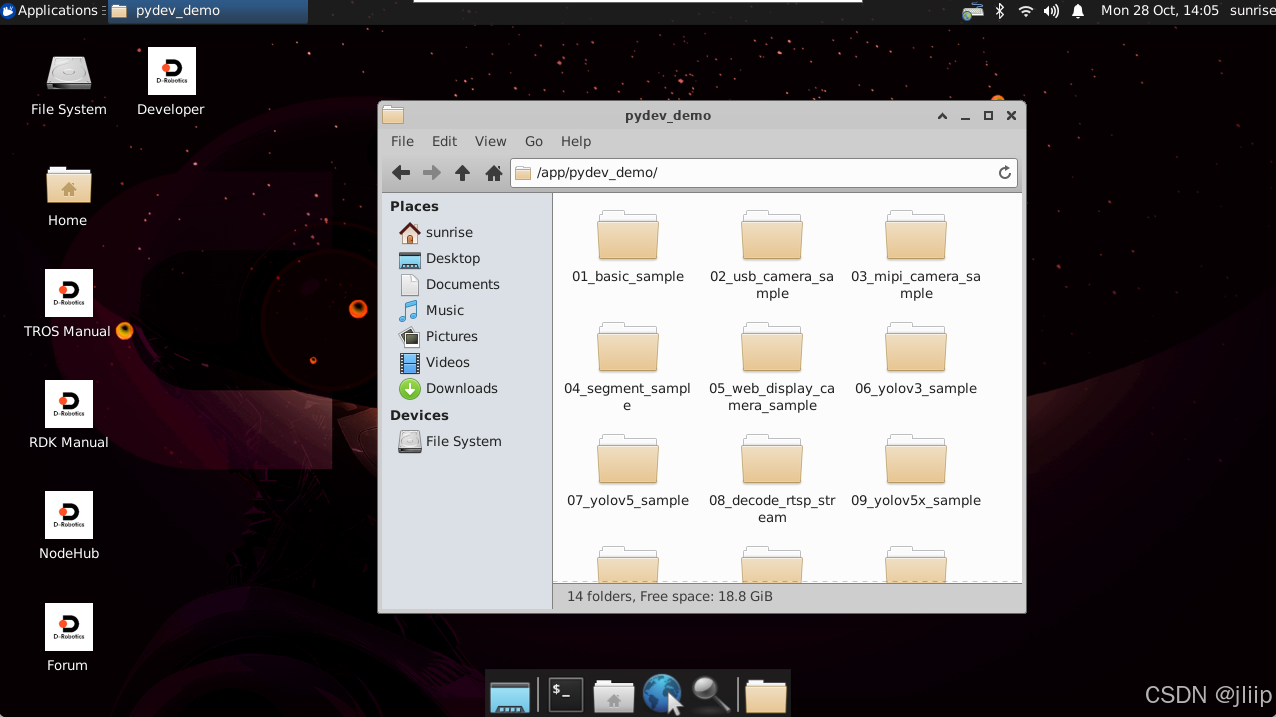
包括mipi/usb摄像头输入的实时目标检测,以及yolov3,yolov5的多个版本。后续可以根据自己的需要对于样例进行修改并应用。目前,我们先以简单的yolov5_sample为例:
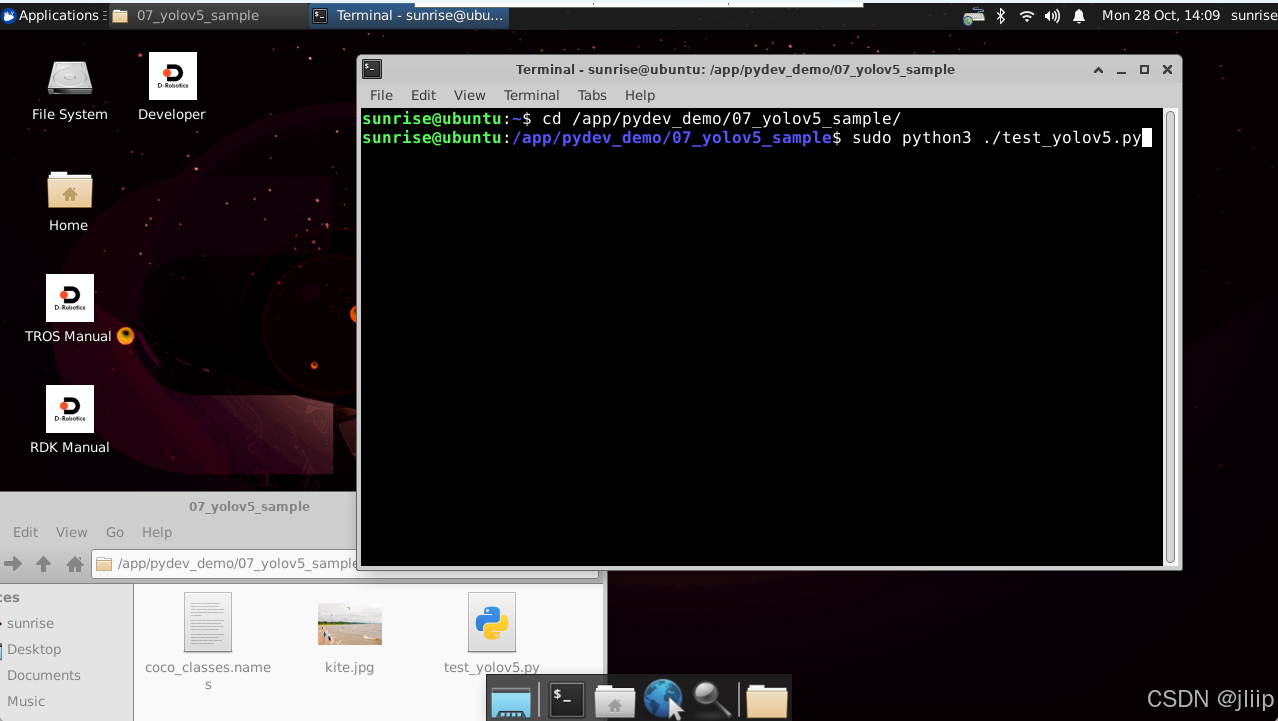
点开terminal,输入:cd /app/pydev_demo/07_yolov5_sample/
(转到测试样例对应的文件目录。)
接着,输入:sudo python3 ./test_yolov5.py (运行当前文件下的test_yolov5.py文件)
运行完成后,测试样例所在的Terminal中将出现识别成功的坐标信息,准确度概率,识别类型编码id(在coco128数据集中的类型编码),识别名称信息。
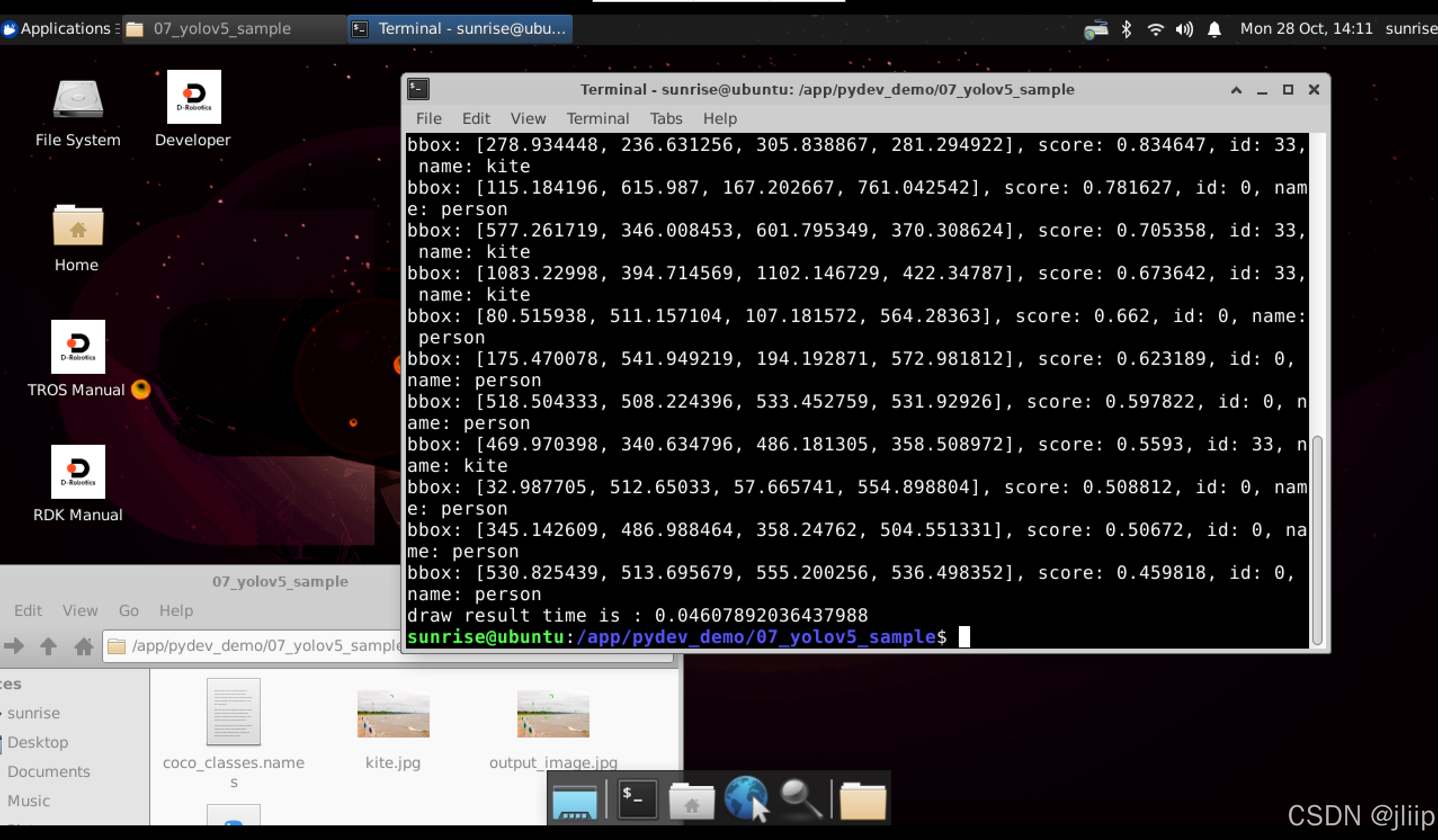
返回到07_yolov5_sample文件夹,此时将多出一张output_image.jpg,就是yolo运行后的输出结果。
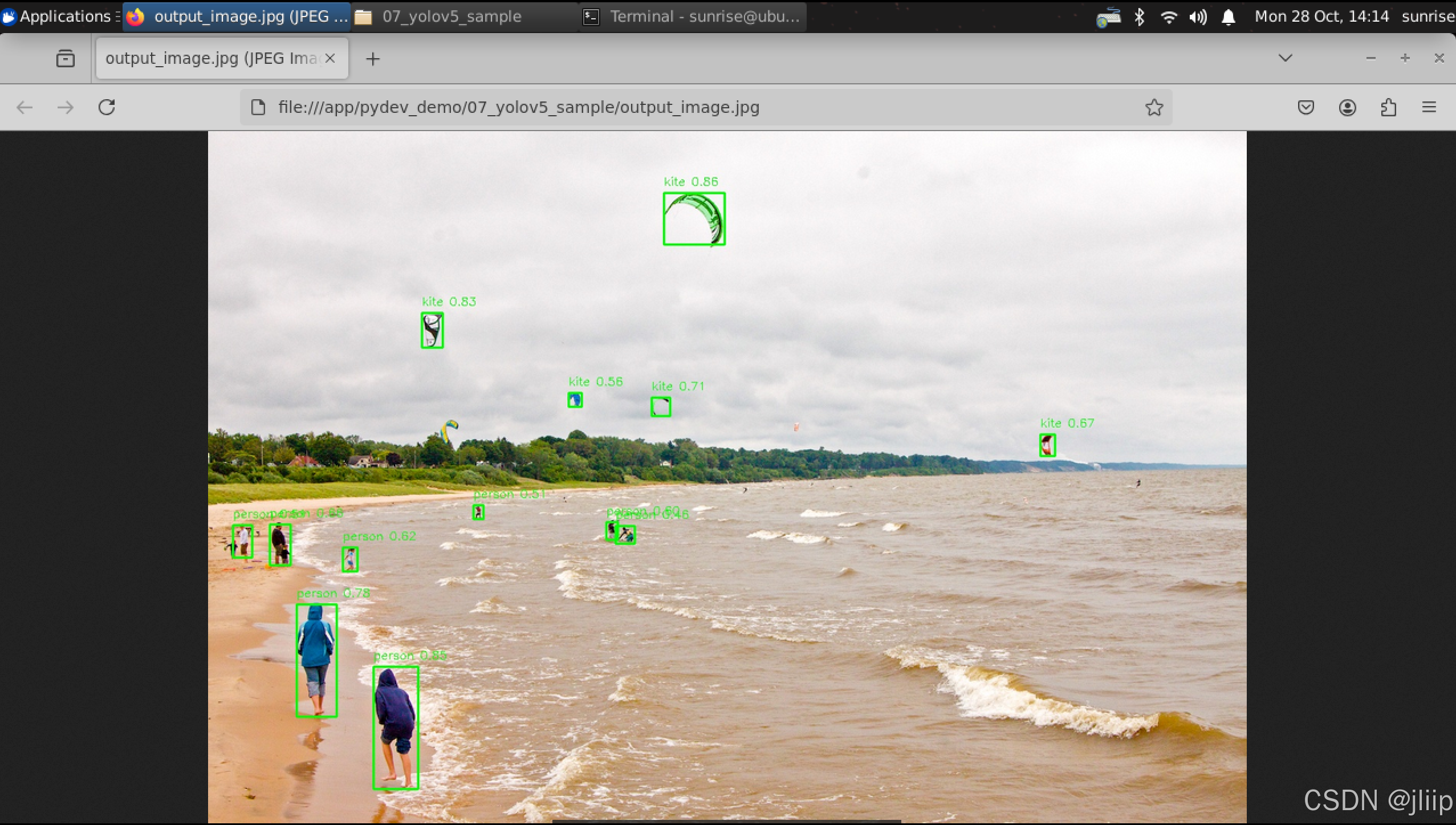
到此,我们已经成功完成了RDK X5的基本设置,并且成功运行了一个简单的目标识别检测样例。
你可以使用同样的方式 cd 到你希望运行的程序所在的文件目录, 并使用 sudo 指定python3运行指定的文件。
后记
目前实测未修改的usb_camera_sample可以运行到20fps,基本满足性能需求。
在开发板的desktop中,可以点击RDK Manual查看地瓜机器人提供的官方论坛教程,包括开始的应用以及后续的开发扩展。
感谢观看,收藏与交流,若有不足欢迎提出!

















 358
358

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









