







离散系统最优控制
说明:
在前述对终端状态确定情况的最优控制问题的基础上,进一步对终端状态不确定情况进行具体地讨论。
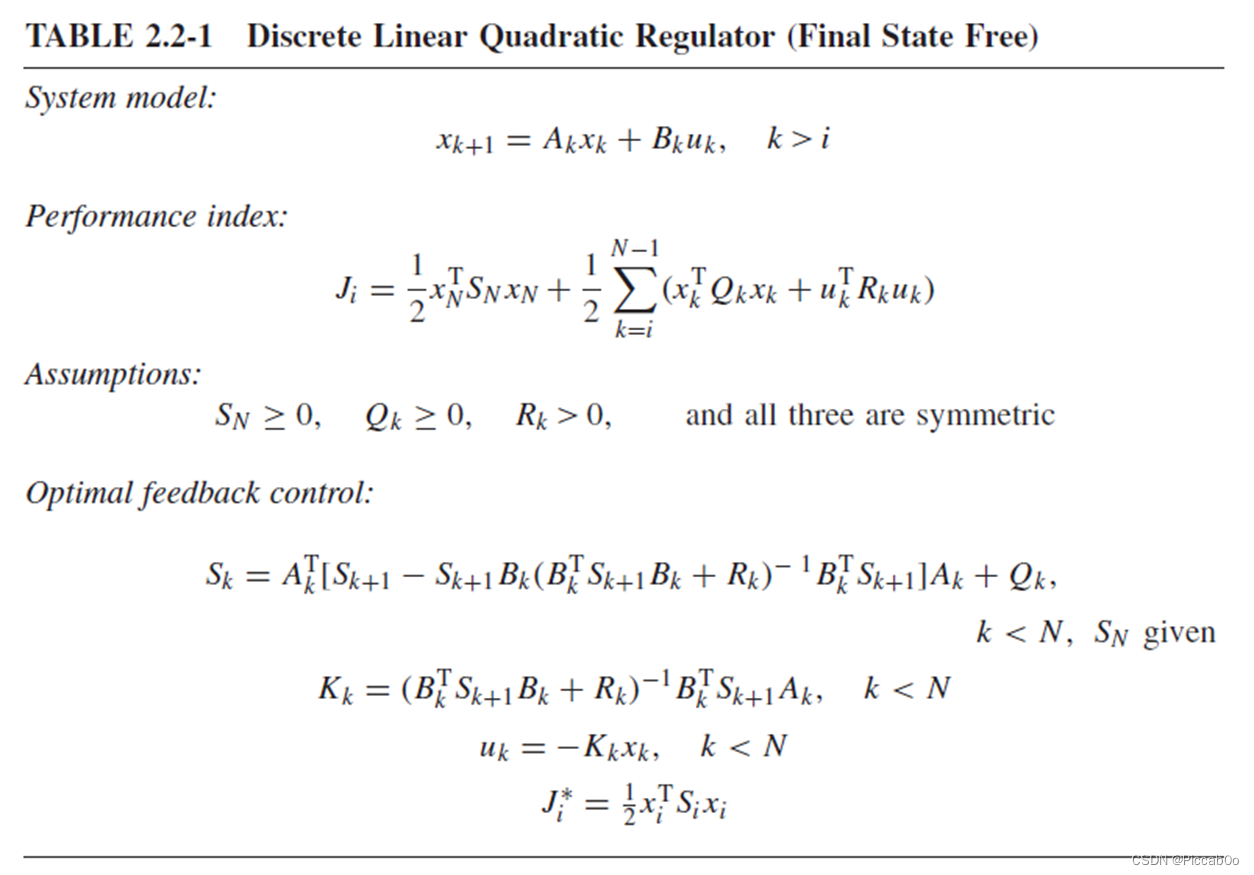
2.4 终端状态不确定——闭环控制
(2.4-1)思路:
类似的分析思路,我们还是根据Hamilton函数由式(2.2-5~8)可以得到状态、协状态和控制量的最初表达式:


但,对于终端状态不确定情况的
x
N
x_N
xN,
d
x
N
≠
0
dx_N\neq0
dxN=0,可以需要根据其边界条件:

得到:

又根据性能指标中的终端状态权重项
ϕ
=
1
2
x
N
T
S
N
x
N
\phi=\frac12x_{N}^{\mathrm{T}}S_{N}x_{N}
ϕ=21xNTSNxN可得:

此处,不同于终端状态固定情况下状态和协状态解耦的形式,这里终端状态不固定时,状态和协状态耦合,很难求解。
但很容易看出,如果我们假设所有的
λ
k
\lambda_k
λk都满足式(2.2-49)的形式,即:

便使问题求解容易。因此,只需要找到
λ
k
\lambda_k
λk的一致表达形式即可。
(2.4-2)解决:
将式(2.2-50)代入状态 x k + 1 x_{k+1} xk+1的表达式(2.2-45)得:

将式(2.2-50)代入协状态
λ
k
\lambda_k
λk的表达式(2.2-46)得:

由于
x
k
x_k
xk往往非零,故两边可同除
x
k
x_k
xk,再利用matrix inversion lemma 可得:

这说明
S
k
S_k
Sk完全取决于系统的权重矩阵和
s
k
+
1
s_{k+1}
sk+1,因此
λ
k
\lambda_{k}
λk的形式满足,假设成立,可以基于此继续求解最优控制问题。
(2.4-3)最优控制问题求解:
上式(2.2-53)称为Riccati equation,如果 ∀ k , ∣ S k ∣ ≠ 0 \forall k,|S_k|\neq0 ∀k,∣Sk∣=0,可以继续用matrix inversion lemma改写:

其代入式(2.2-51)可得状态轨迹
x
k
x_k
xk的迭代关系式。
进一步,考虑控制量 u k u_k uk。由式(2.2-47)可得:

由于将
S
k
+
1
S_{k+1}
Sk+1和
x
k
+
1
x_{k+1}
xk+1都带入数值求解太过于繁琐,因此,考虑将约束方程
x
k
+
1
=
A
k
x
k
+
B
k
u
k
x_{k+1}=A_kx_k+B_ku_k
xk+1=Akxk+Bkuk代入,可得:

此处,控制量可以利用Kalman gain改写成:

因此,为了找到最优控制量,只需要求解Riccati equation找到
S
k
S_k
Sk,算出Kalman Gain即可。
同时,很有趣的一点是,最优控制序列 u k u_k uk是状态 x k x_k xk的比例函数。
(2.4-4)总结:
对于终端状态不确定的LQ问题,求解步骤总结如下:
对于the final-state weighting matrix
S
k
S_k
Sk的原始形式,可以采用Kalman Gain改写:

其等价于Joseph stabilized version of the Riccati equation:

其求解起来具有更优的数值求解性能。
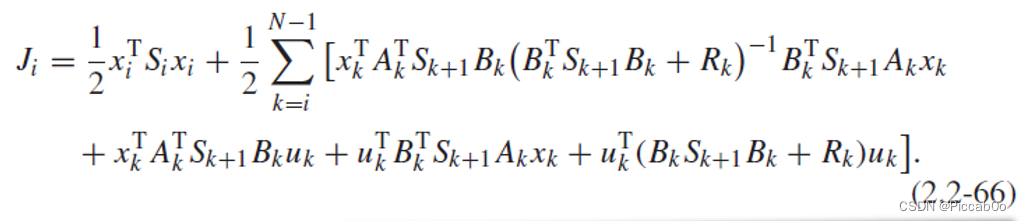
(2.4-5)对该情况下性能指标的研究:
研究上述最优控制量作用下系统的性能指标:

利用下式改写
J
i
J_i
Ji:


再将
x
k
+
1
=
A
k
x
k
+
B
k
u
k
x_{k+1}=A_kx_k+B_ku_k
xk+1=Akxk+Bkuk代入,等价于:

根据Riccatt Equation(2.2-53),其又可以写成:
可以整理成:

容易发现,当采用最优控制量
u
k
u_k
uk控制时,性能指标为:

更一般地,
∀
k
∈
[
i
,
N
]
\forall k \in [i,N]
∀k∈[i,N],都能算出
[
k
,
N
]
[k,N]
[k,N]区间段的性能指标
J
k
J_k
Jk:

由此,称
S
k
S_k
Sk为performance index kernel matrix。
(2.4-6)与前述内容的联系
说明:
为了直观地理解基于Riccati方程的控制律,回顾前述内容。
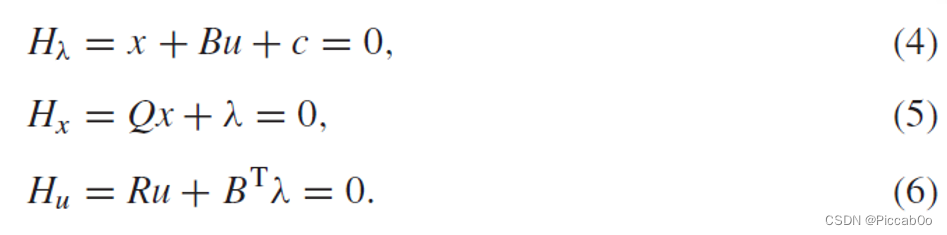
在静态优化部分例1.2-2,考虑二次型性能指标:

其线性约束设为:

写出Hamilton函数:

可以得出:
最优控制量:

通过最优控制量,可以得到最优状态和拉格朗日乘子:

利用the matrix inversion lemma,拉格朗日乘子可以改写成:

利用式(1.2-31):

可以得出the constrained curvature matrix :

回顾:
①由式(2.2-66)可得time-varying curvature matrix:
∂ 2 J i ∂ u k 2 = B k T S k + 1 B k + R k \frac{ \partial ^2 J_i}{\partial u_k^2 }=B_k^TS_{k+1}B_k+R_k ∂uk2∂2Ji=BkTSk+1Bk+Rk
易知,时变情况下的系统与静态系统的曲率矩阵具有类似的形式。
②由式(2.2-51)经the matrix inversion lemma 改写可得状态表达式:

其也与静态系统的最优状态(13)具有类似的形式。
③在终端固定条件的讨论零输入情况下( B k = 0 B_k=0 Bk=0),二次的Riccati Eqution也降阶成了线性的Lyapunov equation:

(2.4-7)示例:
P a g e 158 − P a g e 169 Page_{158}-Page_{169} Page158−Page169,例子中的 S k S_k Sk差分方程难以求解,分别讨论了不同情况下的数值求解方法。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









